






PHY概述
后面要开始搞车载以太相关的开发工作,之前对这方面没什么了解,在这里整理一下学习笔记
文章目录
1. PHY 是什么
1.1 协议层下的PHY
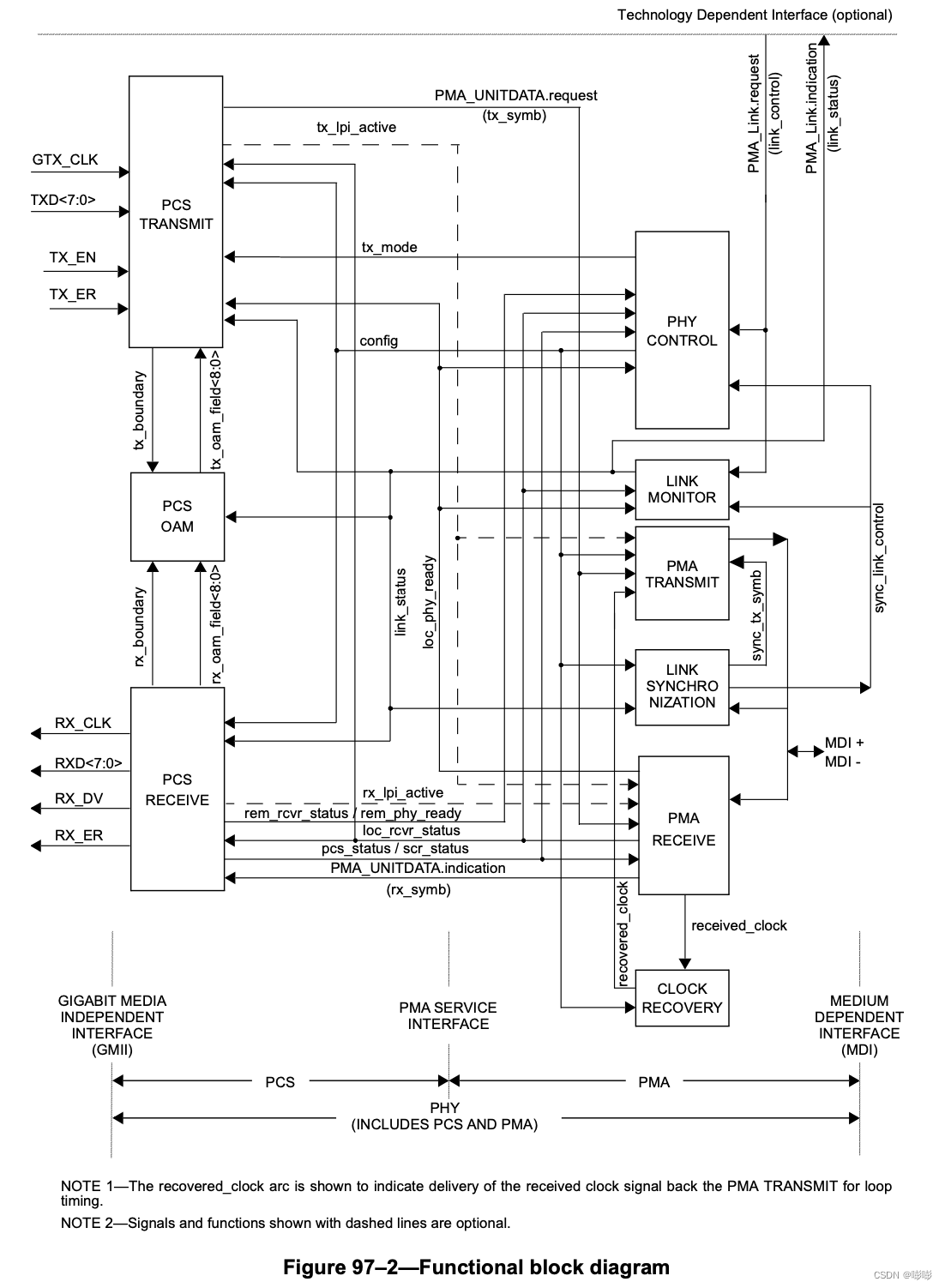
图片出处是IEEE 802.3 (2022)Clause97。 PHY是以太网协议物理层协议,并经由MII(or GMII等一系列MII接口向上与数据链路层MAC通讯。个人理解,以太网协议下,物理接口的改变只影响到PHY协议,再上面的MAC协议则不再受电气接口影响(不确定)。但PHY协议以下规定了若干不同物理接口以适配相应,最常见的有物理层接口即RJ45网口,千兆车载也有使用一对双绞线的接口等。

1.2从硬件角度看PHY
为实现以太网功能,硬件层面一般由CPU,MAC和PHY三部分组成。主流方案是CPU中集成MAC芯片,同时PHY单独做一个芯片。MAC是全数字器件,但是PHY同时有模拟和数字两部分(对外输出的信号是模拟信号,这个地方目前不是很理解,mark一下)。
PHY的上行接口通过MII/GMII与MAC层面通讯,MII即media independent interface, 下行接口则是MDI media dependent interface, 两个词放一起可以更好理解MAC的接口是独立于物理连接条件的,而下行的MDI就是具体的物理接口(如RJ45)所以是Dependent。

* 话说GTX_CLK是不是MII的TX_CLK? 根据22.2.2.1 看 TX_CLK也是sourced by PHY所以箭头方向反了啊。
* 另外上图没有略了CRS和COL两个信号:
* CRS(22.2.2.11):carrier sense, asserted by PHY when either the TX or RX medium is nonidle. shall be deasserted when both TX and RX are idle, PHY shall ensure CRS remains asserted throughout the duration of a collision condition
* COL(22.2.2.12): collision detected, shall be asserted by PHY upon detection of a collision on the medium
2. MAC和PHY的接口MII
2.1 构成
粗略可以理解成 TX, RX 和 Management 三部分,细节先略,TX RX主要应该就一些相关状态信号,主要注意MGMT这里通讯对象是PHY的单独的一个management,这个部分是可以直接对接PCS和PMA两部分的,而TX RX是只对PCS的(个人目前对PCS的理解就是在PMA和(G)MII接口之间进行数据格式的转换,这个在后面章节再细说)

具体的先略,细节协议里比较清楚参考IEEE802.3 2022:
- Clause 22(MII),
- Clause 35(GMII)
- Clause 22.2.4 (Management functions)
- Clause 45 (MDIO interface, 感觉意义不大)
2.2 TX, RX 略
2.3 Management Functions
2.3.1 Management Interface
这部分被叫做 MII Management Interface。 一根时钟线(MDC)和一根数据线(MDIO)。
2.3.2 Management registers
这个interface操作的对象就是相应的management registers。MII中最基本的组成就是 Control reg和 Status reg, 总共有16个寄存器是协议固定的,然后reg16-31是各厂商自行定义的。(然后这些寄存器的物理位置应该就是上图“PHY management 吧?)
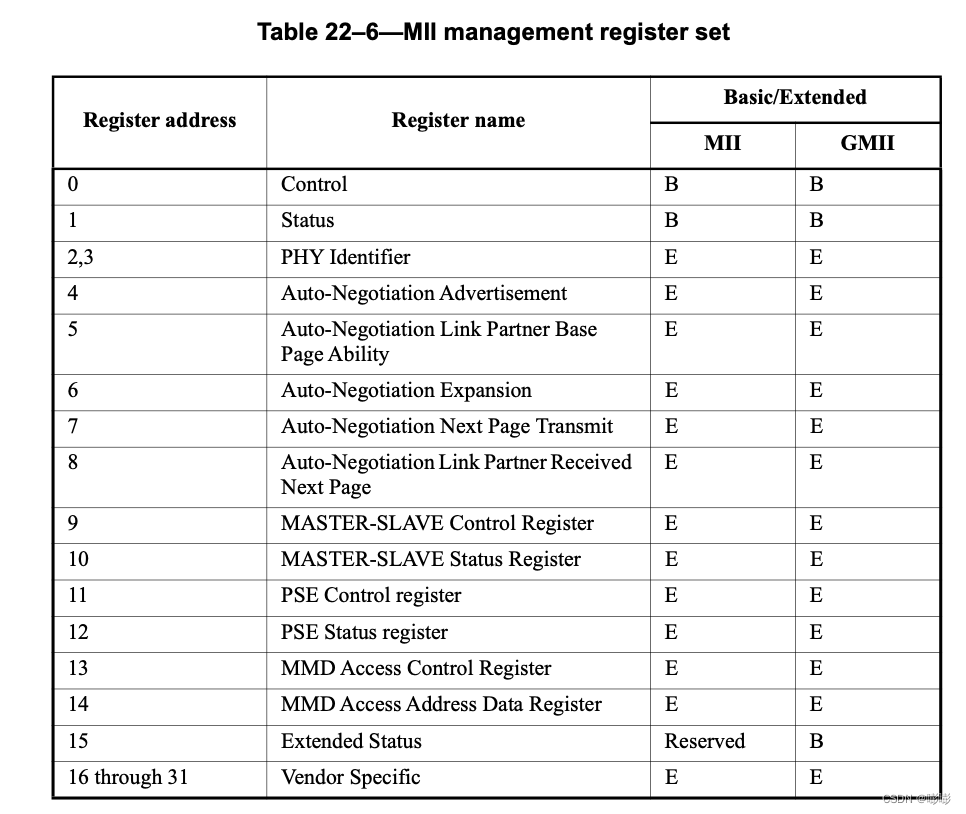
- Control reg

相关keywords: loopback,AN, collision test,这都还完全没概念,后面学习。 - Status register
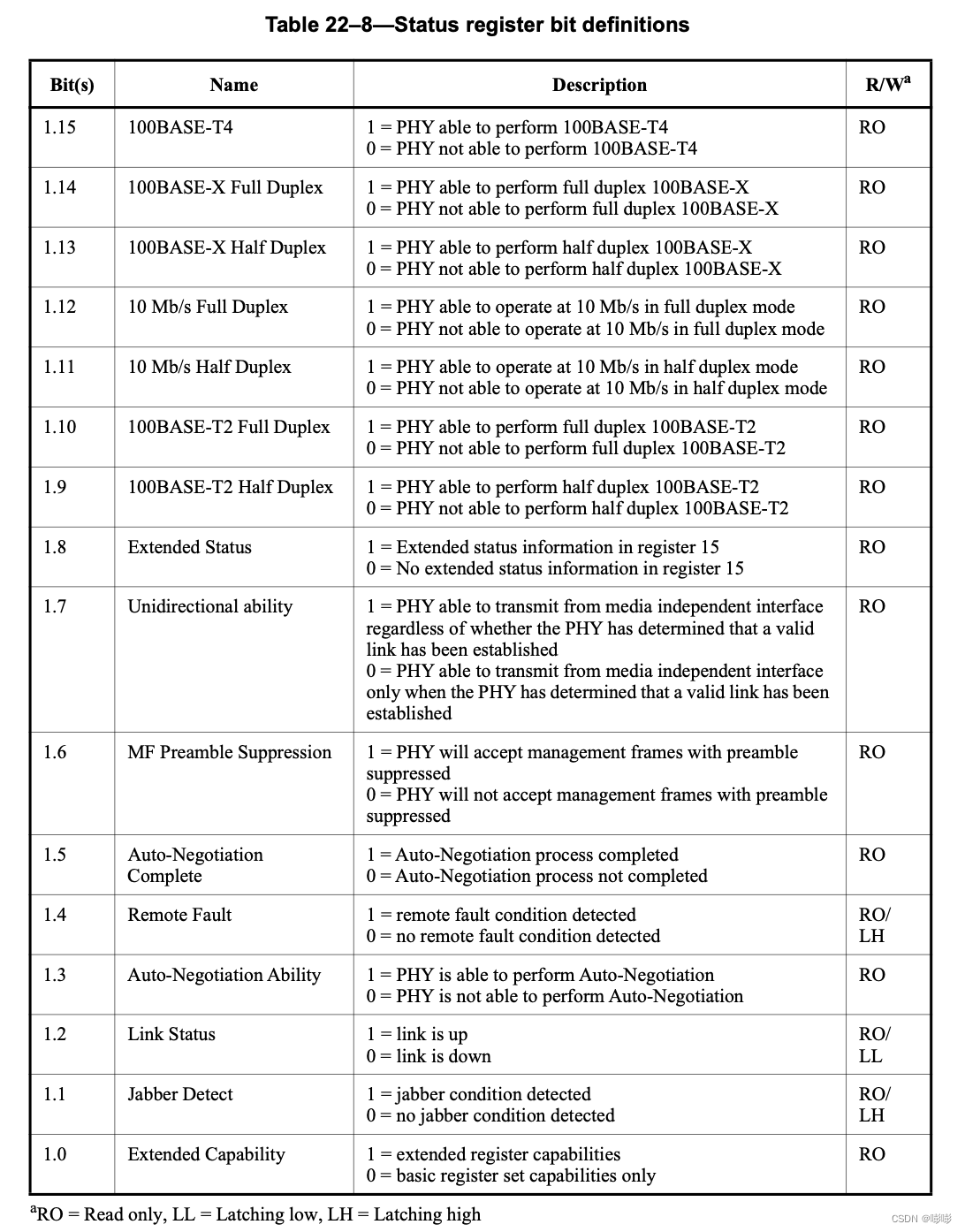
Mapping:
3. PCS
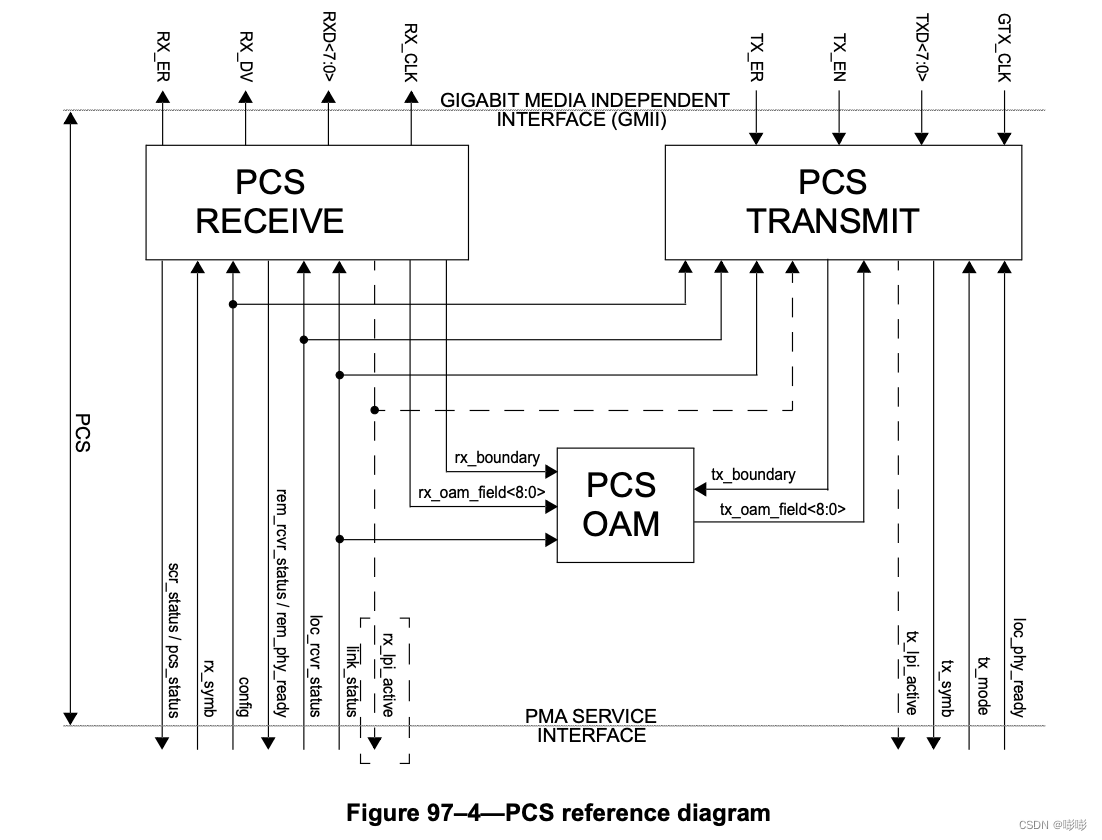
reset functions 和 operating functions( sync & async TX RX)
3.1 PCS TX
GMII_TX -> PCS_TX -> PMA -> MDI (PAM3 signal)
1. data mode(PMA_TXMODE == SEND_N)
2. training mode (PMA_TXMODE == SEND_T)
3. loopback mode (MDIO loopback bit is set)
4.
3.2 PCS RX 后面补充
3.3 PCS Management
通过 MDIO Interface 操作。
ref to IEEE 802.3 2022 Clause 97.3.7
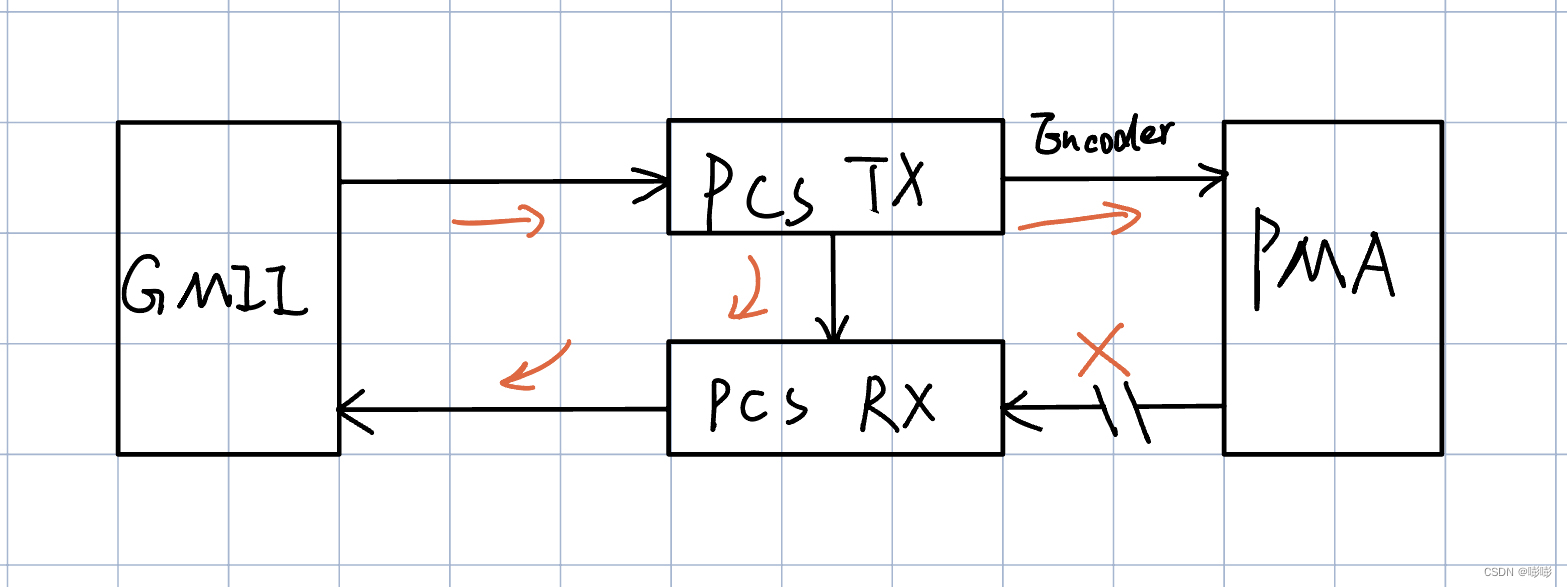
3.4 PCS Loopback
此模式下PMA->PCS的路是不通的,PCS直接将接受的GMII传来的数据传回去
3.5 PCS OAM
Operations, Administration, and Maintenance. 目的是monitoring link opeartion such as exchanging PHY link health status and message exchange。 交互对象 “between two 1000BASE-T1 PHYs on the physical layer and their associated management entities if present" 。
OAM 不是必要的,但EEE情况下至少要用OAM exchange the link partner health status
4. PMA
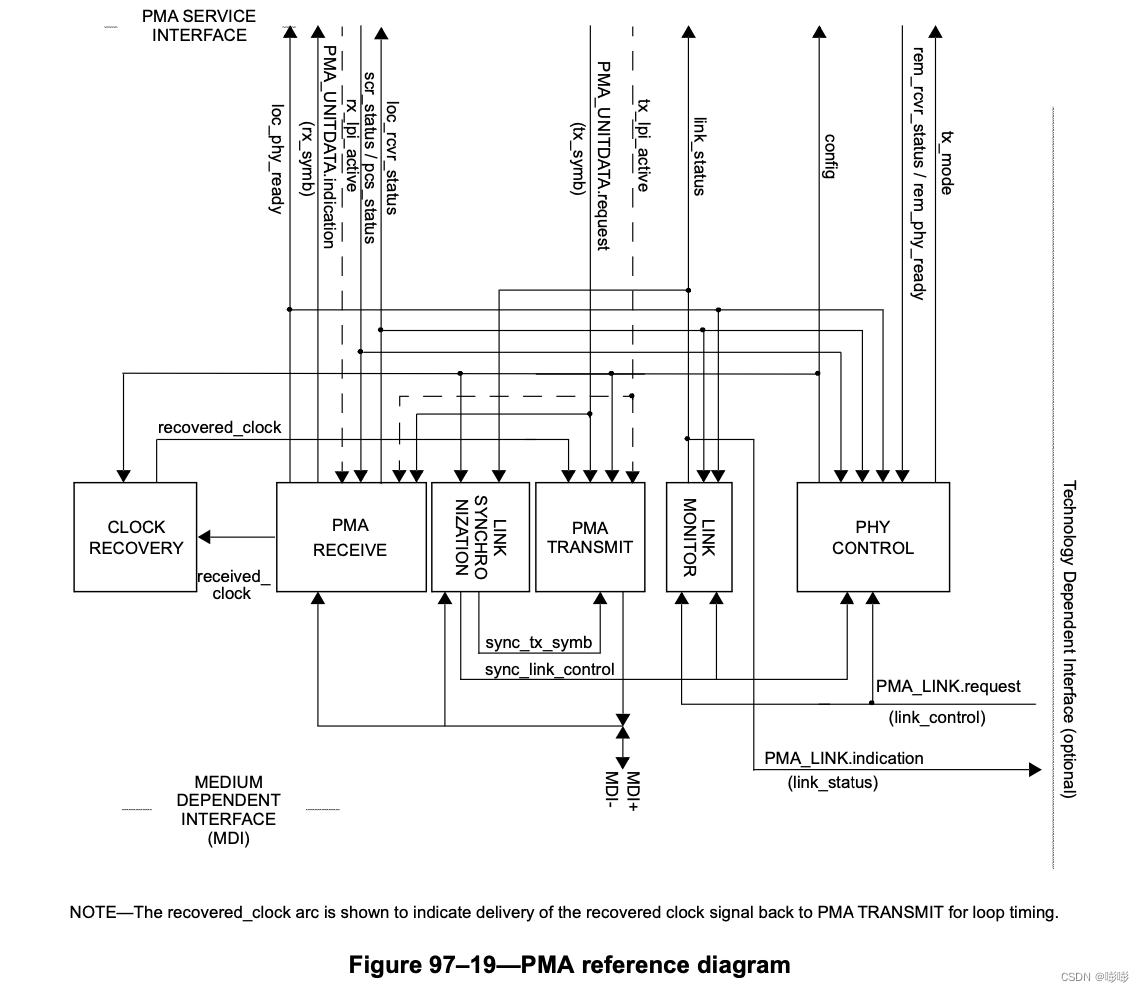
PMA包含的function比较多,一个reset和五个sync&async operating functions。
- PHY control
- PMA TX
- PMA RX
- Link Monitor
- Clock Recovery
1 PHY Control function
总结
主要先简要介绍一下PHY的基本信息,个人对于过于抽象的东西理解起来太困难,感觉只有这样具象的讲起来才好理解。后面计划先学习PCS和PMA的内容,再看看EEE低功耗















 1370
1370











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









