







 超级会员免费看
超级会员免费看
 本文深入探讨了位姿估计在计算机视觉中的应用,详细讲解了仿射变换、透视变换以及图像坐标系、相机坐标系和世界坐标系之间的关系。通过张氏标定方法进行相机标定,利用线性法求解相对位姿,分析了实际场景中的位姿变化,并提供了代码实践,展示了相机投影和3D到2D投影的计算过程。
本文深入探讨了位姿估计在计算机视觉中的应用,详细讲解了仿射变换、透视变换以及图像坐标系、相机坐标系和世界坐标系之间的关系。通过张氏标定方法进行相机标定,利用线性法求解相对位姿,分析了实际场景中的位姿变化,并提供了代码实践,展示了相机投影和3D到2D投影的计算过程。
目录大纲
理论架构
基础知识汇总篇:
https://blog.csdn.net/weixin_42237113/article/details/104500993
API详解:
https://blog.csdn.net/weixin_42237113/article/details/104488809
基础梗概
1. 仿射变换和透视变换
仿射变换
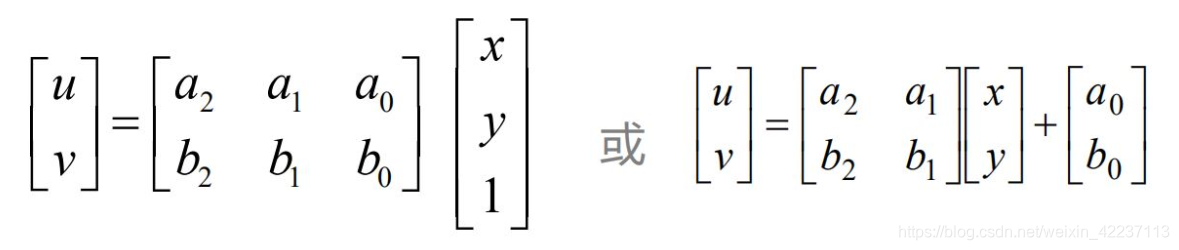
又称仿射映射,是指在几何中,一个向量空间进行一次线性变换并接上一个平移,变换为另一个向量空间。 仿射变换是在几何上定义为两个向量空间之间的一个仿射变换或者仿射映射(来自拉丁语,affine,“和…相关”)由一个非奇异的线性变换(运用一次函数进行的变换)接上一个平移变换组成。 基本表达形式如下所示:
举例说明

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 529
529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











