







多传感器数据融合的实现需要系统化的流程和多种技术策略的结合,具体步骤如下:
1. 数据采集与预处理
多传感器输入:从不同类型的传感器(如摄像头、LiDAR、温度传感器等)收集原始数据,确保覆盖多维信息。
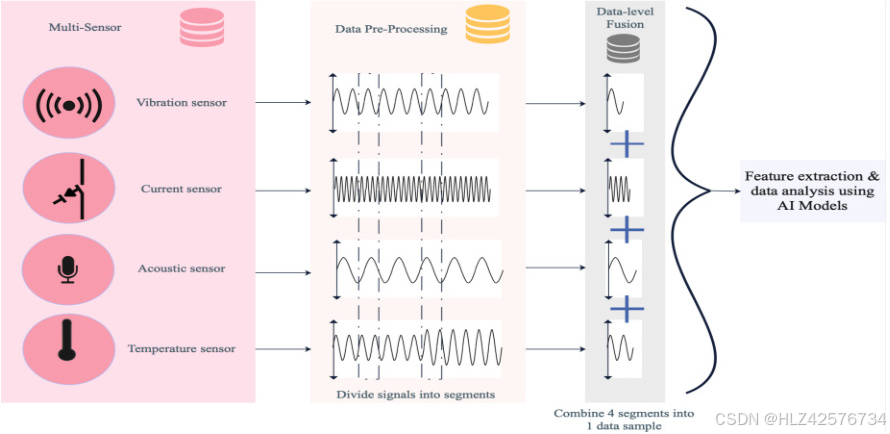
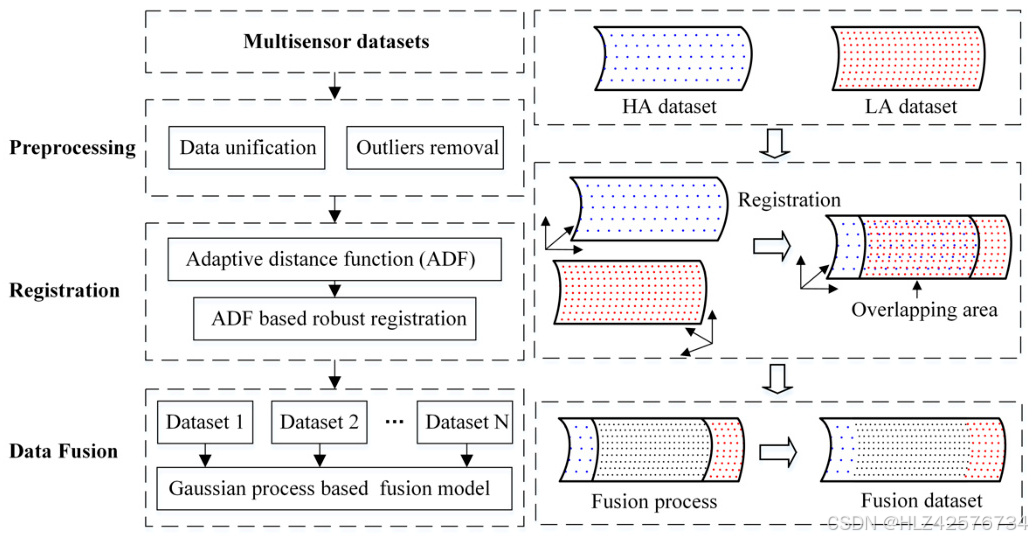
数据标准化:通过归一化处理消除量纲差异,例如将振动、声学等信号统一到相同尺度
。
异常值处理:去除噪声或无效数据,例如使用滤波算法或统计方法(如标准差分析)
。
2. 特征提取与数据对齐
特征提取:对每个传感器的数据提取关键特征,如信号频域特征(振动传感器)或图像中的边缘特征(摄像头)
。

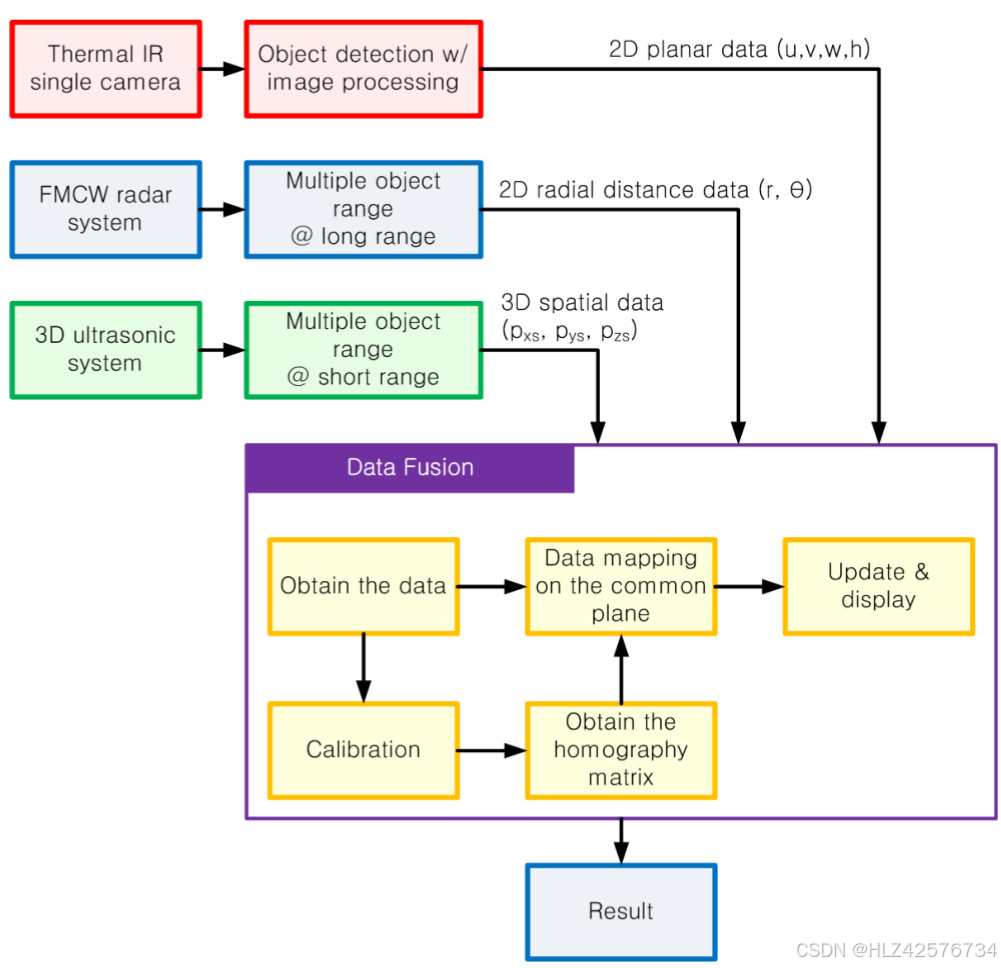
时空对齐:通过时间同步和空间注册(如自适应距离函数ADF)确保不同传感器的数据在同一参考框架下
。
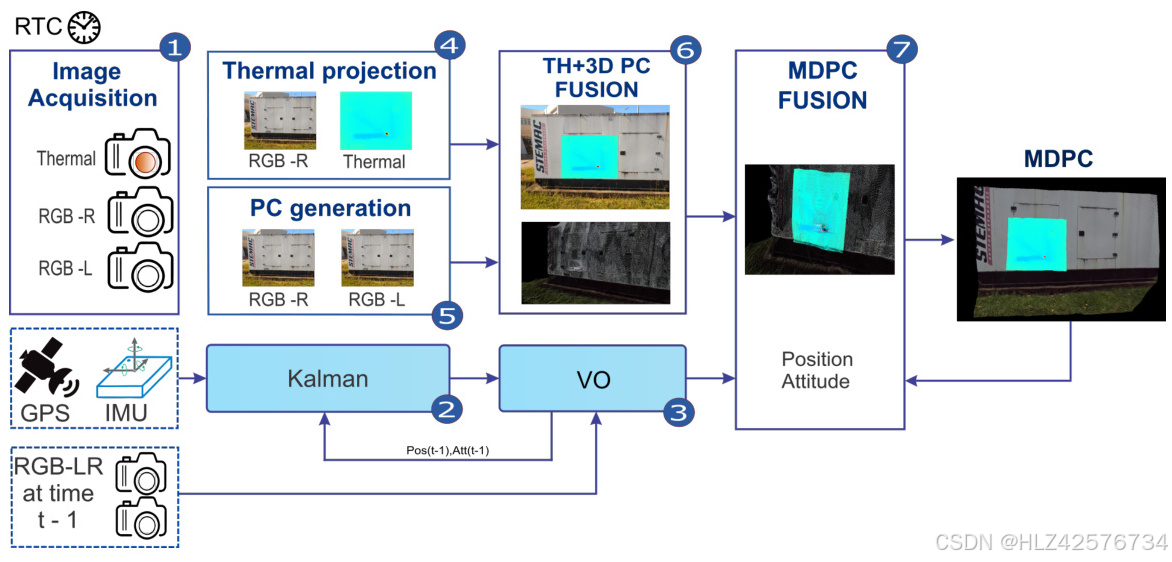
例如,热成像数据需与RGB相机的点云空间配准
。
3. 融合策略选择
数据级融合:直接合并原始数据(早期融合),适用于传感器类型相似的情况。例如,将多个摄像头的图像拼接
。
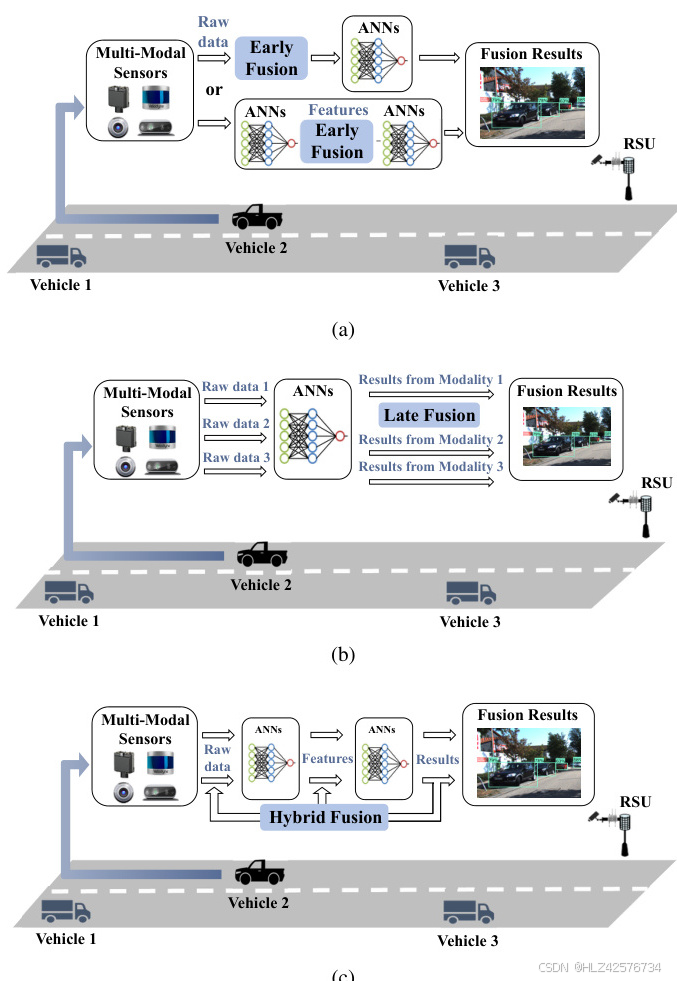
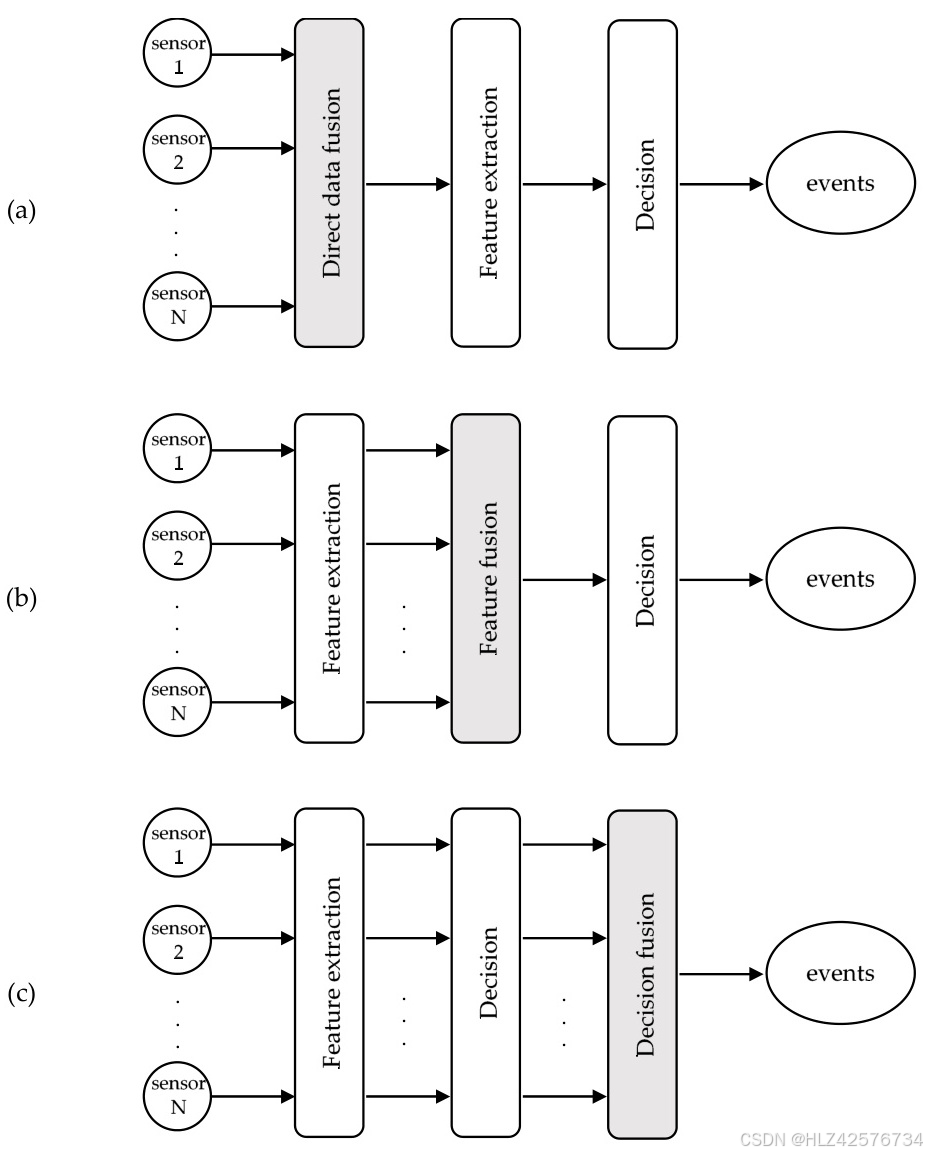
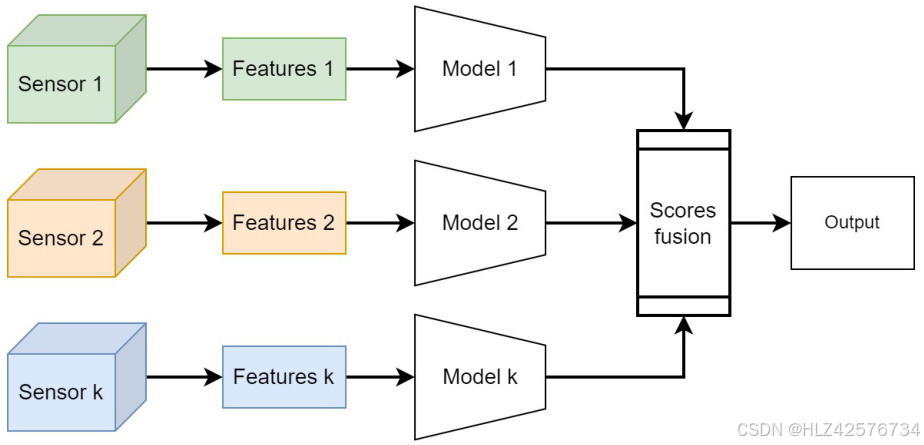
特征级融合:提取特征后进行整合。
提到各传感器特征分别训练模型,再融合预测分数;
(b)则将所有特征合并后输入单一模型
。
决策级融合:各传感器独立决策后合并结果。例如,
©中每个传感器的决策通过投票或加权整合
。
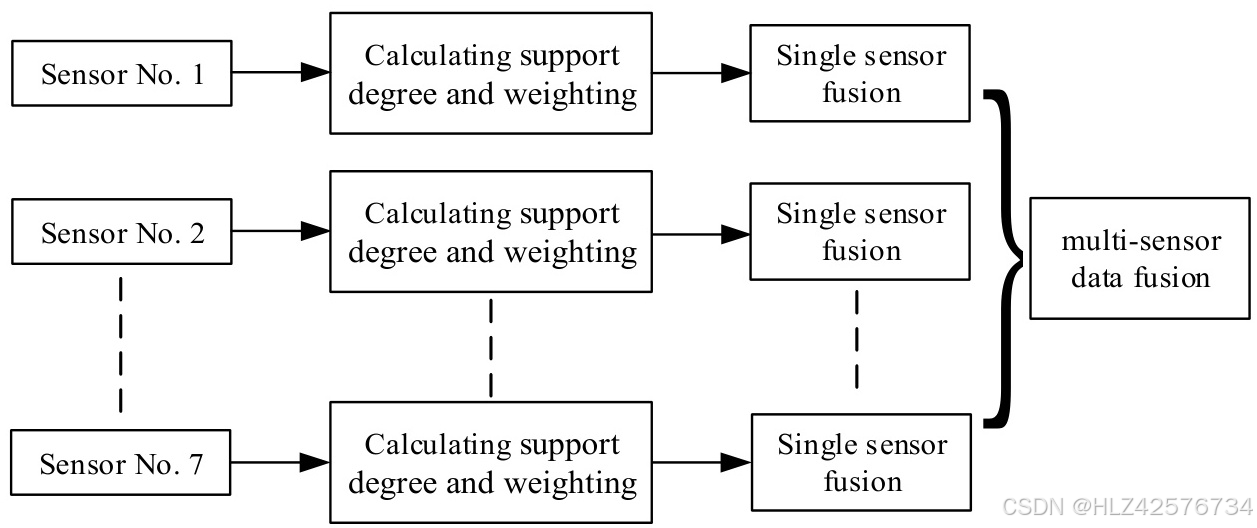
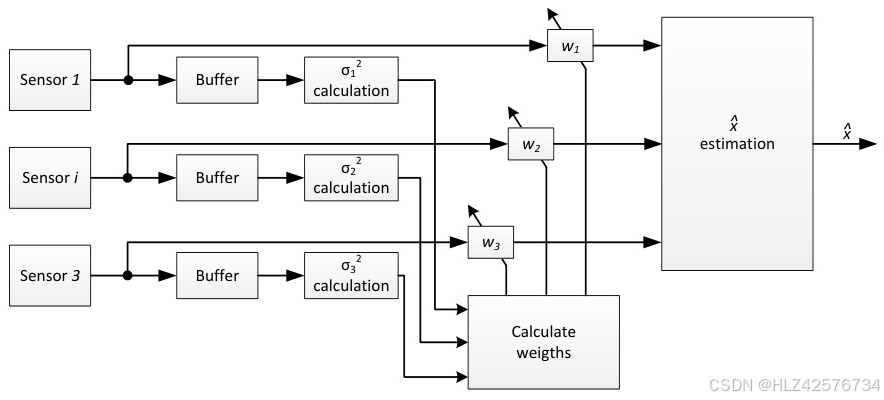
4. 融合算法实现
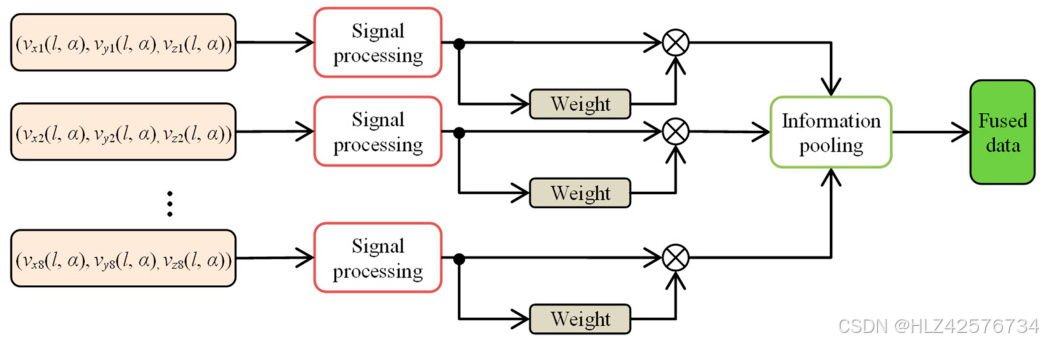
加权融合:根据传感器可靠性分配权重。
通过计算标准差动态调整权重,
使用信息池化加权合并
。
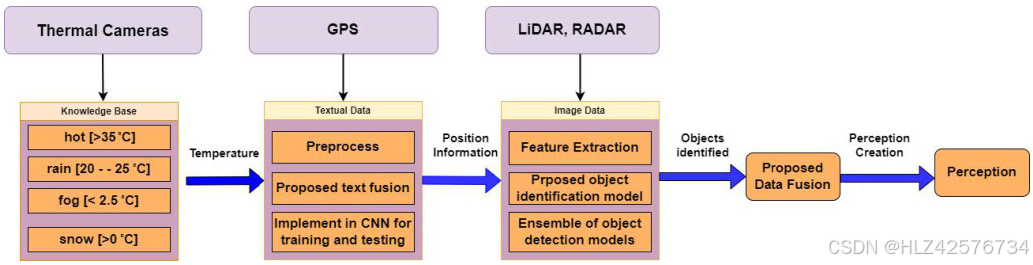
模型驱动融合:利用机器学习模型整合数据。例如,
中的神经网络处理融合特征,
结合CNN进行图像与文本数据融合
。
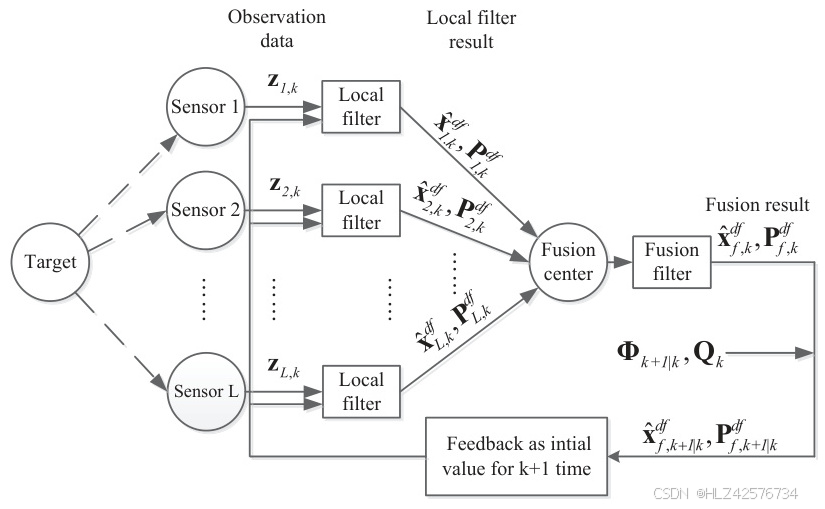
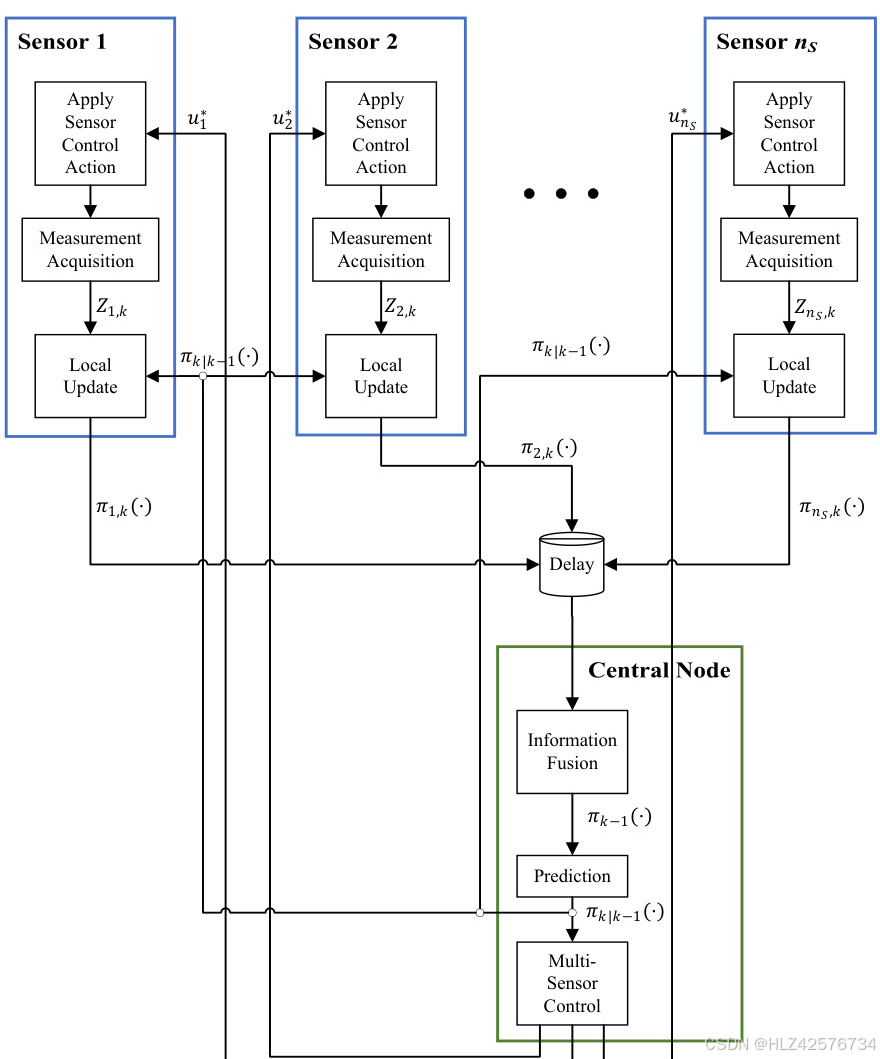
分布式与集中式融合:分布式架构(如
的局部滤波器+融合中心)适合大规模系统;集中式(如
的中央节点)适合实时性要求高的场景
。
5. 结果优化与应用
鲁棒性增强:通过重叠区域融合
或多模态验证(如热成像与激光雷达互补)提高精度
。
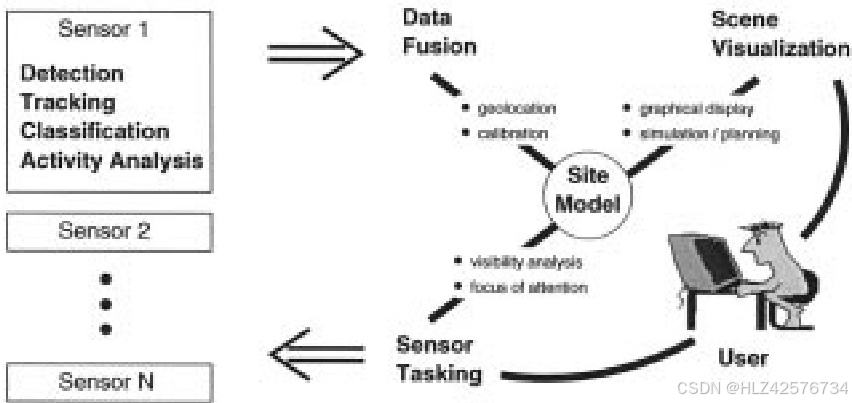
可视化与决策支持:生成站点模型或3D点云地图,用于导航、障碍检测等任务
。
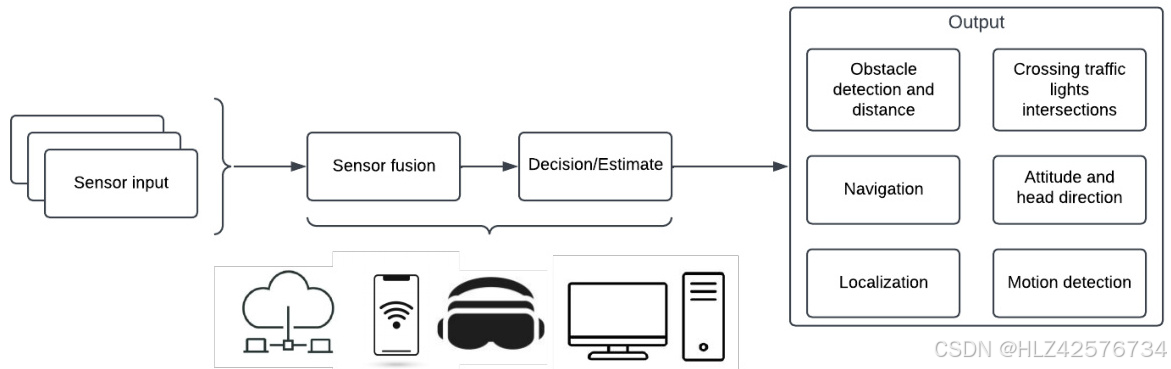
例如,
的系统输出障碍物距离和定位信息
。
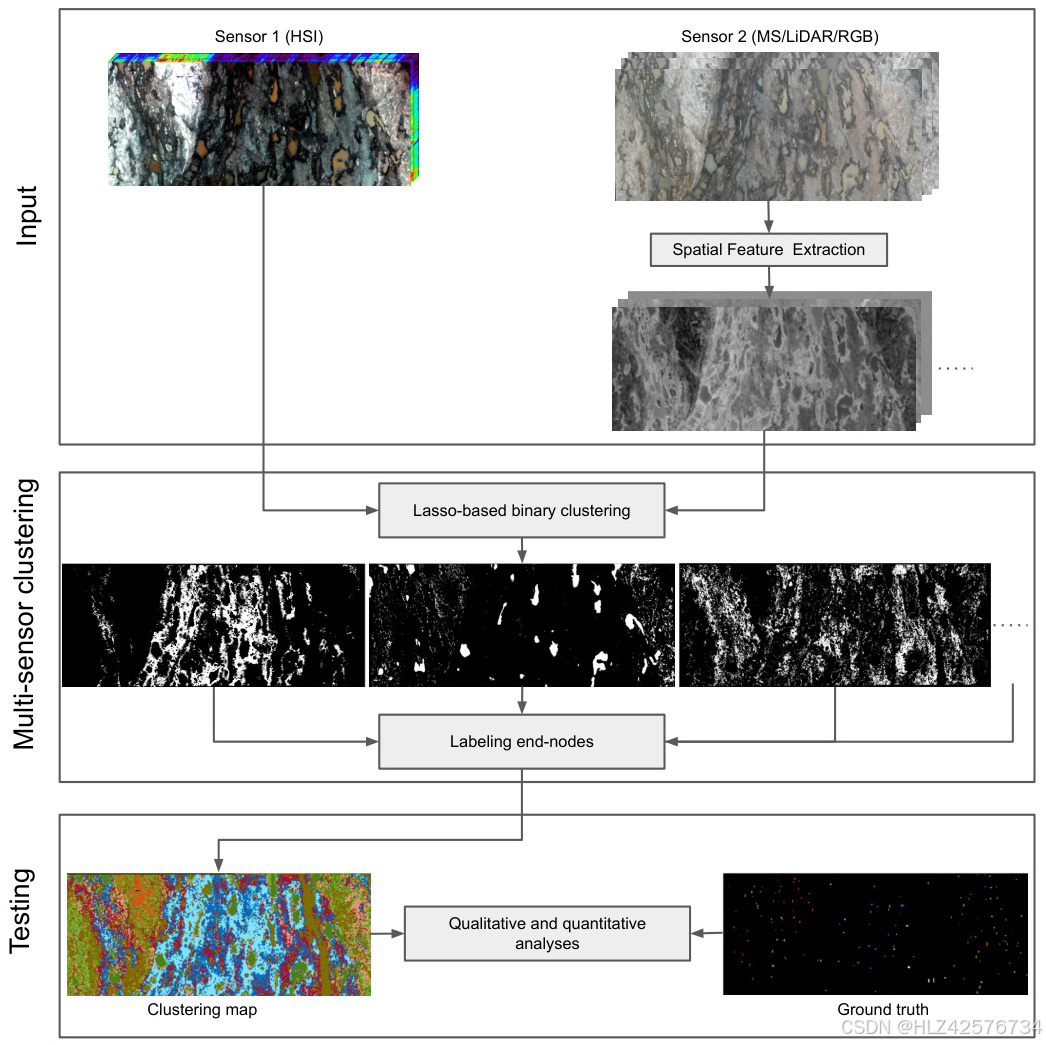
6. 评估与反馈
性能测试:对比融合结果与地面实况数据,进行定性与定量分析(如
的聚类地图验证)
。
动态调整:根据环境变化(如雨雾条件)更新融合策略,例如
中结合温度阈值调整感知模型
。
典型应用场景
自动驾驶:融合LiDAR、摄像头和GPS数据实现环境感知
。
工业检测:振动与温度传感器融合诊断设备故障
。
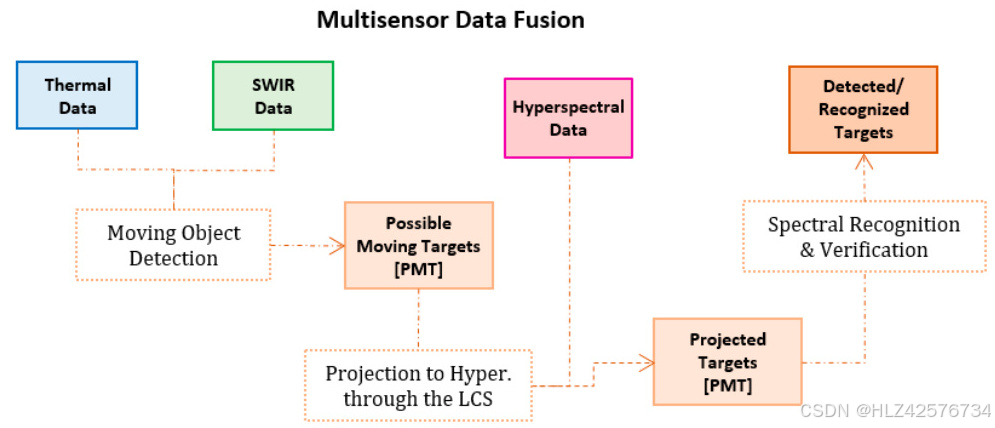
安防监控:热成像与SWIR数据结合检测移动目标
。
综上,多传感器数据融合需综合考虑传感器特性、融合层次(数据/特征/决策)及算法选择,通过标准化、对齐、加权和模型整合提升系统性能,最终服务于高精度感知与智能决策
。
♯ 如何在多传感器数据融合中实现高效的时空对齐?
在多传感器数据融合中实现高效的时空对齐是一个复杂且多方面的任务,涉及时间同步、空间校准以及数据处理等多个环节。以下是基于我搜索到的资料,对如何实现高效时空对齐的详细分析:
1. 时间同步与插值
时间同步是实现时空对齐的基础。例如,在激光雷达与相机的融合中,通过时间戳插值同步IMU(惯性测量单元)和相机的时间戳,可以将激光雷达点云数据帧与相机图像帧对齐。这种方法利用了IMU的时间信息,通过公式计算出相机帧对应的IMU时间戳,从而实现时间上的精确对齐
。此外,对于多光谱相机和光谱仪的融合,可以通过获取毫秒级的时间戳和操作系统提供的实际时间标签来优化时间对齐
。
2. 空间校准与配准
空间校准是确保不同传感器数据在空间上一致的关键步骤。例如,在多光谱相机和光谱仪的融合中,通过图像-光谱仪数据对齐算法,将光谱仪的时间线按比例移动以匹配图像数据的空间位置,从而实现空间上的对齐
。此外,对于多传感器系统,可以通过设计全局和局部传感器级别的内特征对齐方法来减少不同域之间的差异
。
3. 深度学习与模型优化
深度学习技术在时空对齐中发挥了重要作用。例如,一种基于深度学习的多传感器融合系统通过编码器-解码器架构和“FreeAlign”方法实现了高效的时空对齐
。这种方法能够有效消除由于传感器误差或环境变化导致的位置偏差问题,从而提高目标检测和跟踪的准确性。
4. 多传感器数据融合算法
多传感器数据融合算法在时空对齐中也起到了关键作用。例如,一种贝叶斯数据融合方法通过结合不同传感器的时间、分辨率和波段差异,生成高空间和时间分辨率的图像
。此外&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1002
1002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









