






AD16原理图页,一键为所有元件设置相同的PCB封装库路径
- 现象描述(我已经将自己的库放入该工程文件下),就是找不到封装:
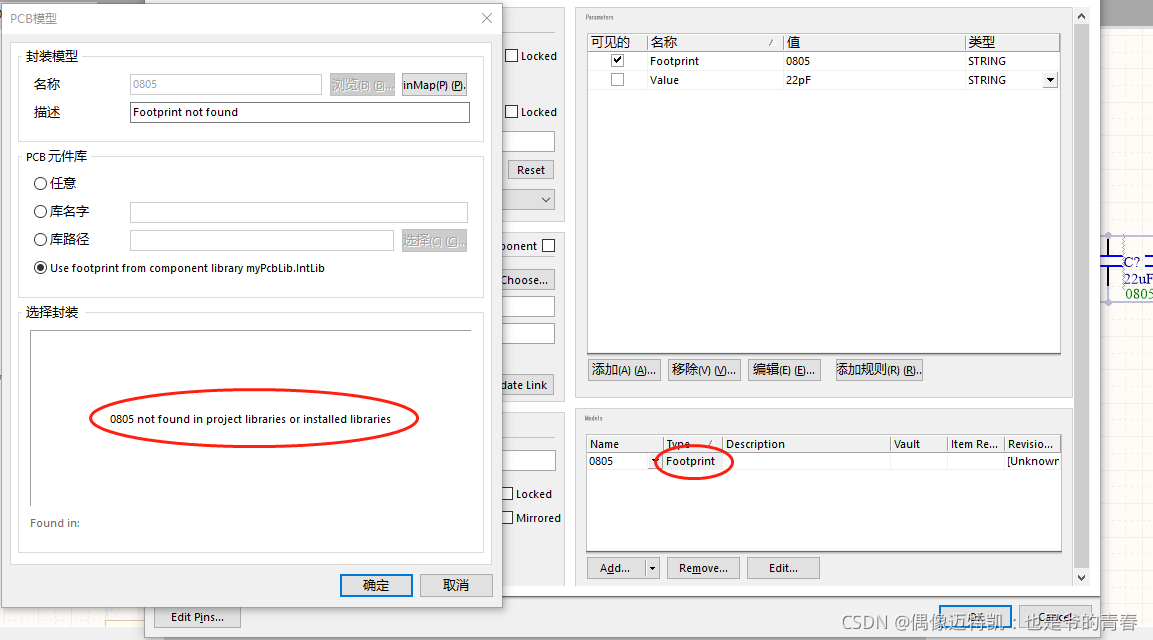
- 如果一个个点击元器件,再一个个的选择库路径,太费劲。
- 工具-封装管理器:
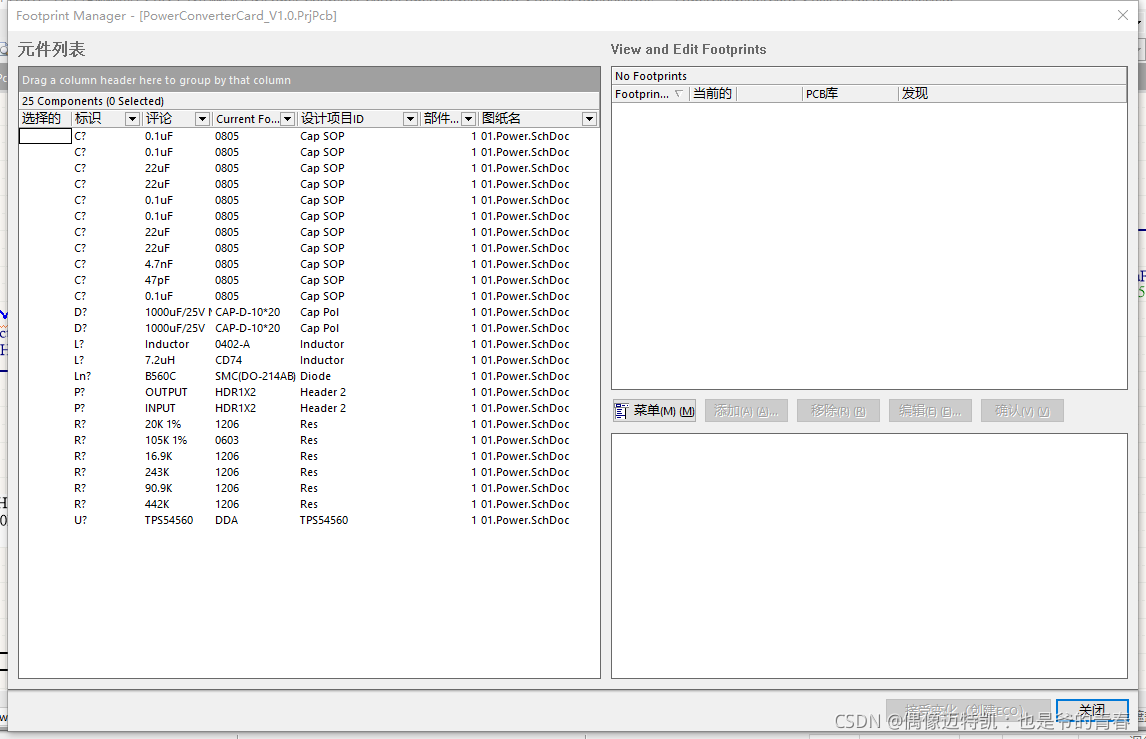
- 选择左栏任意一个,再alt+A,选中左栏所有
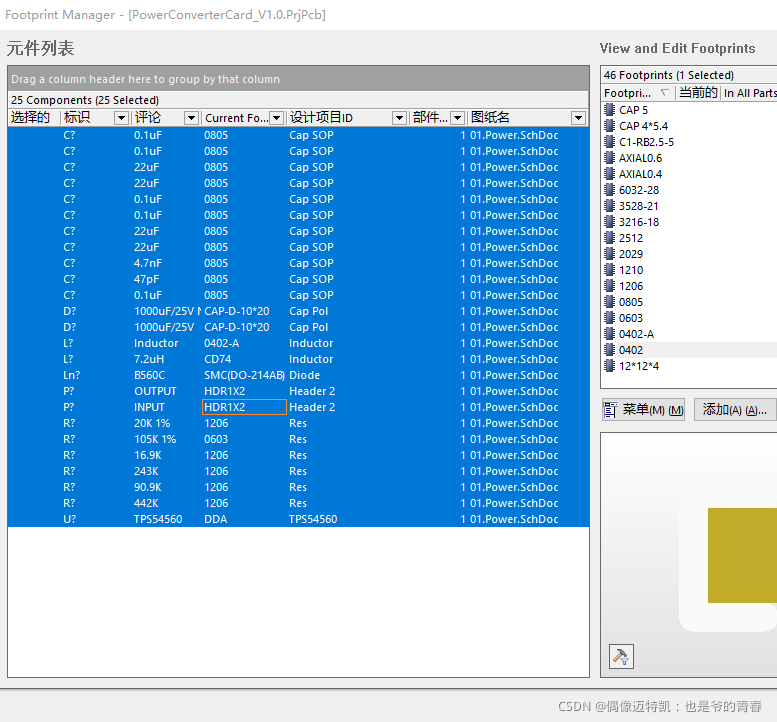
- 右栏:菜单-选择所有
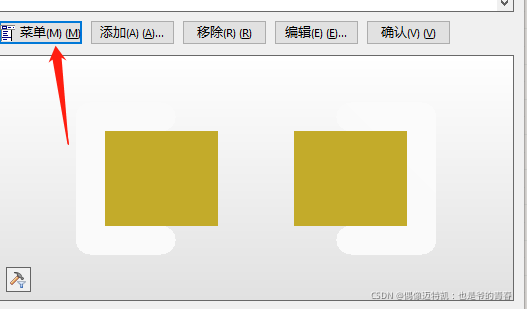
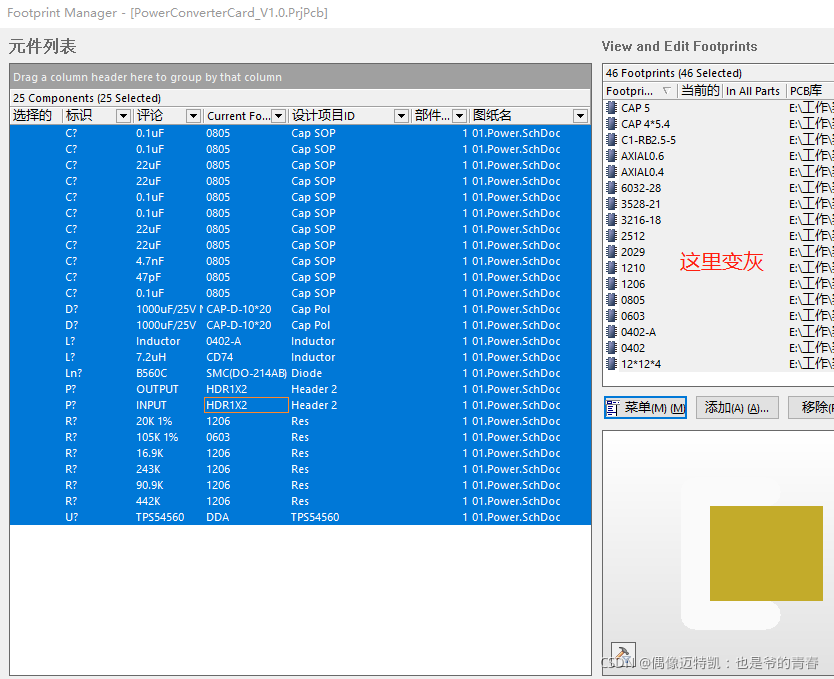
- 右栏:菜单-更改PCB库-库路径-弹出的窗口选择自己的PCB封装库
以上操作即可完成对原理图中所有元件更换PCB库,统一设置库路径的目标,省去了点选的麻烦。

AD16原理图页,一键为所有元件设置相同的PCB封装库路径
以上操作即可完成对原理图中所有元件更换PCB库,统一设置库路径的目标,省去了点选的麻烦。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 1454
1454





