







官方文档
注意:
1.请保证模块输入电源至少5V 2A,否则图片会有几率出现水纹。
2.ESP32 GPIO32管脚控制摄像头电源,当摄像头工作时,请把GPIO32拉低。
3.由于IO0连接摄像头XCLK,使用时请把IO0悬空,请勿接高低电平。
4.出厂已含有默认固件,不另外提供下载,如需重烧其他固件请谨慎操作。
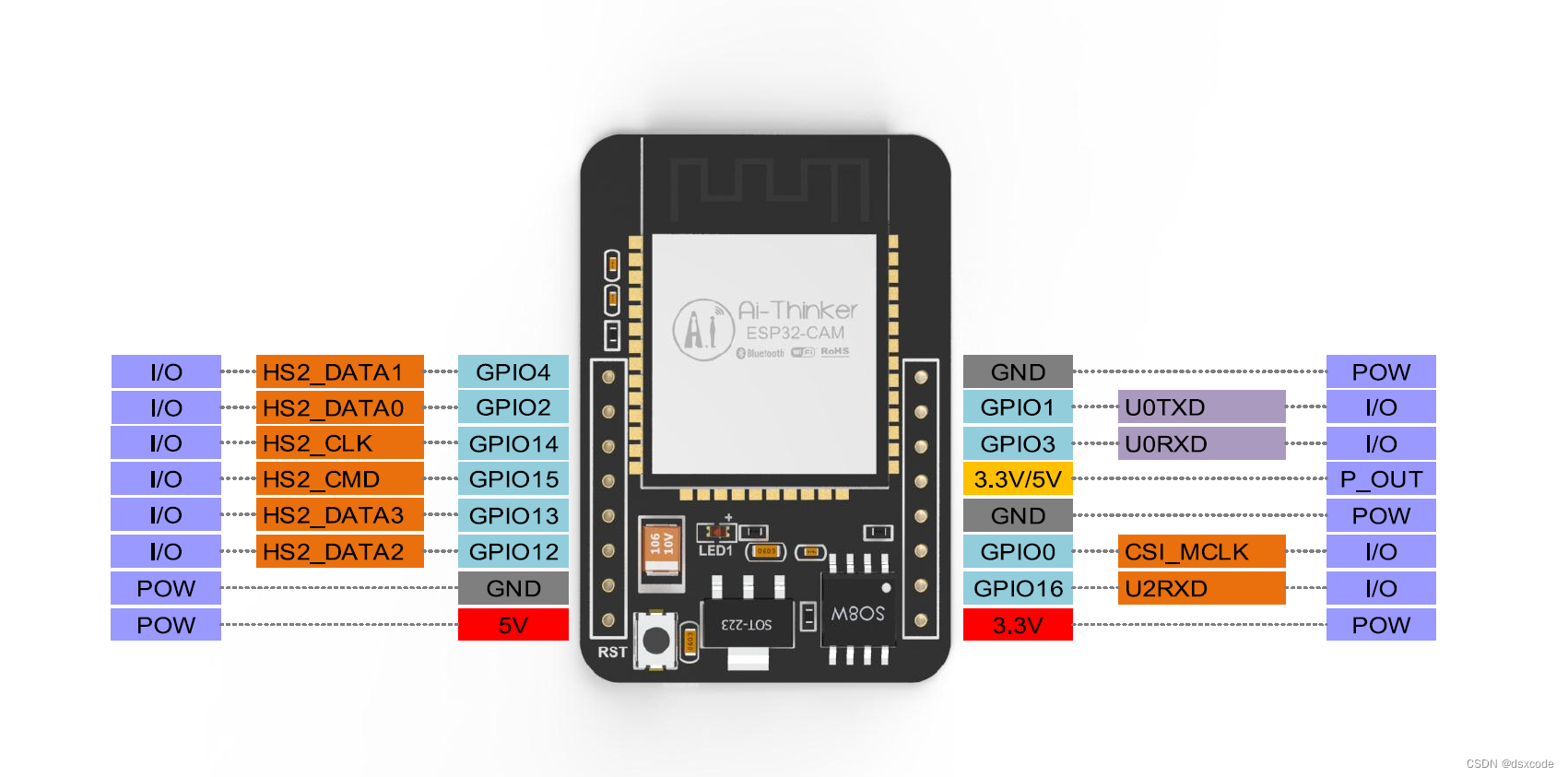
电源
ESP32-CAM 配备三个GND针脚和两个电源针脚:3.3V和5V. 建议通过 5V 引脚为 ESP32-CAM 供电。
电源输出引脚
串口旁边的VCC以输出 5V 或 3.3V。在VCC引脚旁边,有两个焊盘。一个标记为3.3V,另一个标记为5V。默认输出3.3V 输出5V需要去掉3.3V的跳线 连接5V跳线。

GPIO4 闪光灯引脚 接高电平点亮
GPIO33 RST按键旁边的红色指示灯
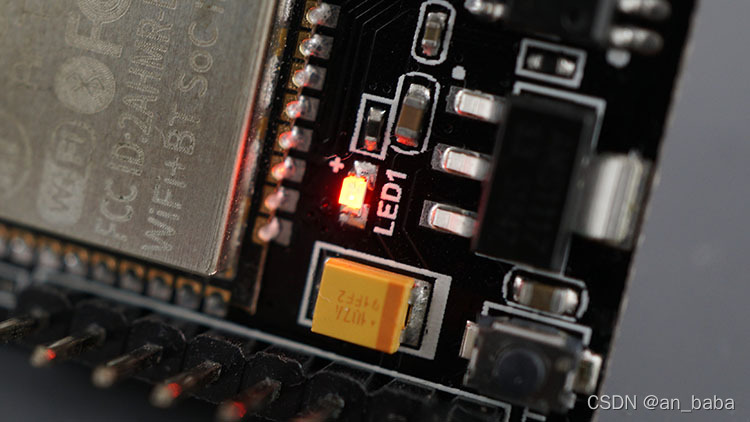
点亮指示灯
void setup() {
pinMode(33, OUTPUT);
}
void loop() {
digitalWrite(33, LOW);
}
















 1497
1497

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









