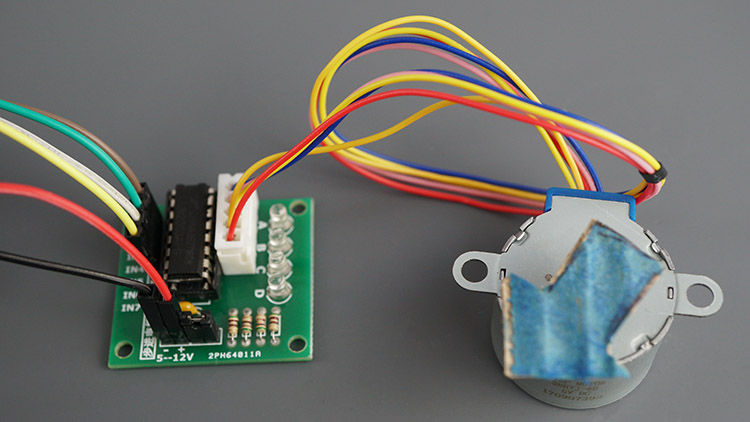
ESP8266 驱动步进电机(28BYJ-48电机 ULN2003 驱动板) 28BYJ-48电机 ULN2003 驱动板 28BYJ-48电机参数 Rated voltage: 5V DC Number of phases: 4 Speed variation ratio: 1/64 Stride angle: 5.625º/64 Frequency: 100Hz 内部原理图


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言













 本文介绍了如何使用ESP8266驱动28BYJ-48步进电机,电机参数包括电压5V、4相、步进角度5.625º/64,搭配ULN2003驱动板。电机通过64:1齿轮传动,每转2048步,精度达0.18º/步。连接时将IN1-4引脚分别连接到GPIO5, 4, 14, 12,并确保ULN2003有独立5V供电。"
84942225,7365488,Windows10上手安装Kubernetes步骤详解,"['Kubernetes', '虚拟化', 'Windows开发环境']
本文介绍了如何使用ESP8266驱动28BYJ-48步进电机,电机参数包括电压5V、4相、步进角度5.625º/64,搭配ULN2003驱动板。电机通过64:1齿轮传动,每转2048步,精度达0.18º/步。连接时将IN1-4引脚分别连接到GPIO5, 4, 14, 12,并确保ULN2003有独立5V供电。"
84942225,7365488,Windows10上手安装Kubernetes步骤详解,"['Kubernetes', '虚拟化', 'Windows开发环境']


 订阅专栏 解锁全文
订阅专栏 解锁全文

















 2522
2522





