







 超级会员免费看
超级会员免费看
参考文章链接:
知乎:最适合深度学习的三维旋转表示
pytorch旋转矩阵转四元数及各种旋转表示方式之间的转换实现代码
CVPR19的论文《On the Continuity of Rotation Representations in Neural Networks》。
这篇文章分析比较了旋转矩阵,欧拉角,四元数等常见三维旋转表示对神经网络训练的影响,并提出了一种适合深度学习的 6D三维旋转表示方法。
不连续(Continiuous)的旋转表示不是好的旋转表示
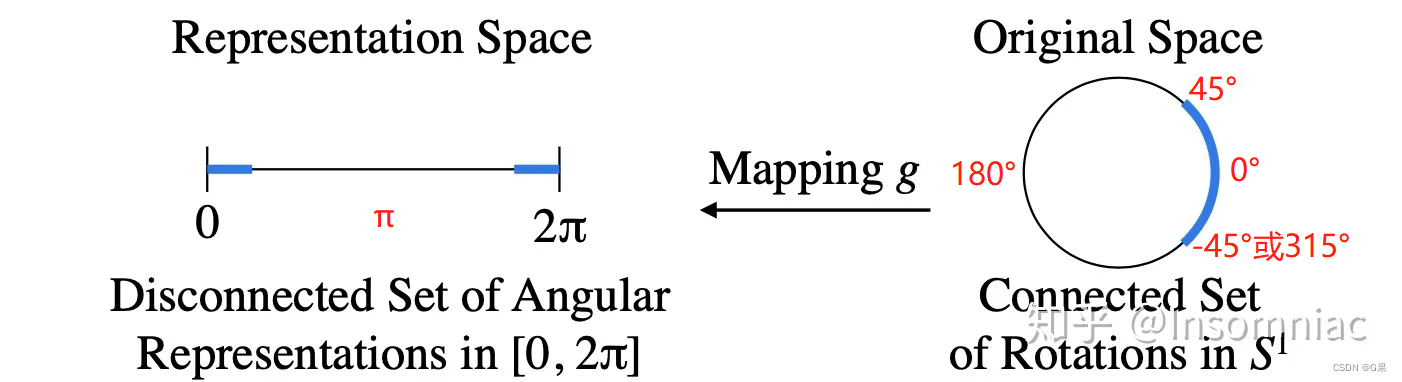
右图中表示的是用几何圆表示的旋转一周,左图是用数值表示的旋转一周,为方便理解,我补充了图中红字
右图从45度到-45度是连续的,但是在左图的数值反映是不连续的,【0–π/4】和【7π/4–2π】

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 115
115

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











