







-
前言
永磁同步电机因其具备高功率密度、高功率因素、高效率等诸多优点,使其在许多工业领域得到广泛应用。永磁同步电机的控制是永磁同步电机应用的关键技术。永磁同步电机控制系统是一个复杂的非线性的时变系统。要设计出高性能的永磁同步电机控制器,对电机控制系统进行建模与仿真是很有必要的。在永磁同步电机控制器开发的过程中,首先采用matlab/simulink对控制方案进行仿真验证,可大大缩短开发周期。
常用永磁同步电机控制方法主要为两种:矢量控制和直接转矩控制。其中矢量控制由于其控制性能优良,所以应用最为普遍。本文借助matlab强大的仿真建模能力,在simulink中搭建了永磁同步电机矢量控制系统模型,进行仿真分析,并对仿真结果进行了实验验证。
2. 永磁同步电机矢量控制策略
永磁同步电机矢量控制基本思想是模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成为互相垂直的转矩电流iq![]() 和励磁电
和励磁电
流id![]() ,以实现磁链与转矩的解耦控制。PMSM矢量控制中电流控制方式多种多样,目前常用的电流控制策略主要有:(1)id=0
,以实现磁链与转矩的解耦控制。PMSM矢量控制中电流控制方式多种多样,目前常用的电流控制策略主要有:(1)id=0![]() 控制;(2)恒磁链控制;(3)力矩电流比最大控制;(4)功率因素cosφ=1
控制;(2)恒磁链控制;(3)力矩电流比最大控制;(4)功率因素cosφ=1![]() 控制;(5)弱磁控制等控制方法。
控制;(5)弱磁控制等控制方法。
以上各种电流控制方案各有各的特点,适用于不同的运行场合。本文所设计的PMSM矢量控制系统采用力矩电流比最大控制和弱磁控制相结合的方式。力矩电流比最大控制使电机在输出力矩满足要求的条件下定子电流最小,减小了电机铜损,同时,在元器件选型时可以选择电流等级较小的元器件,可以有效降低系统成本。弱磁控制可以有效提高PMSM的转速范围。矢量控制系统结构如图1所示。
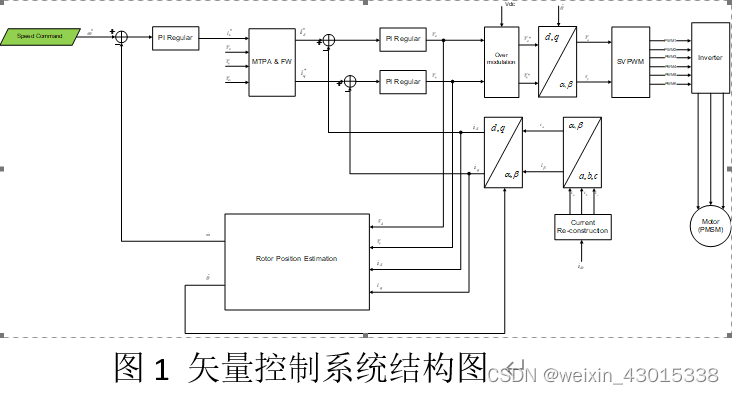
由图1可以看出,控制系统主要包括转子位置估算、速度调节、电流控制、电流调节、坐标变换、电流采样、SVPWM等环节。
3. 系统建模
3.1 主电路拓扑
为了对控制算法进行仿真分析,需要建立准确的被控设备的模型。Simulink的power system工具箱提供丰富的电气元器件模型。基于永磁同步电机控制系统电气图建立了主电路的仿真模型。

图2 永磁同步电机控制系统主电路模型
图2所示永磁同步电机控制系统主电路模型主要包括电源模型、整流模块、逆变模块以及PMSM电机模型等。
3.2 矢量控制建模
基于图1所示永磁同步电机矢量控制系统结构图搭建出simulink仿真模型如下图3所示。
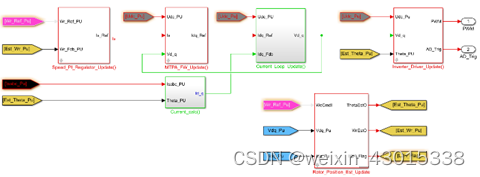
图3 永磁同步电机矢量控制模型
3.2.1 转子位置估算模块
本文采用全维状态观测器对转子位置进行估算。全维状态观测器实质是一种状态重构,也就是重新构造一个系统,利用原系统中可直接测量的状态变量作为它的输入信号,并使重构的状态在一定条件下等价于原系统的状态。当重构状态向量的维数等于被控对象状态向量的维数时成为全维状态观测器。
选取id、iq、ed、eq![]() 作为状态变量,ud、uq
作为状态变量,ud、uq![]() 作
作
为输入变量,根据永磁同步电机数
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2760
2760











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











