






因为疫情在家隔离,与人交流较少,就做个云端远程机器人,与平台爱好者共享互动。
一、项目准备
1、树莓派3B+控制板(烧录好系统)-----------------------一块
2、RoboTerra机器人--------------------------------------------一台
3、USB摄像头----------------------------------------------------一个
二、环境配置
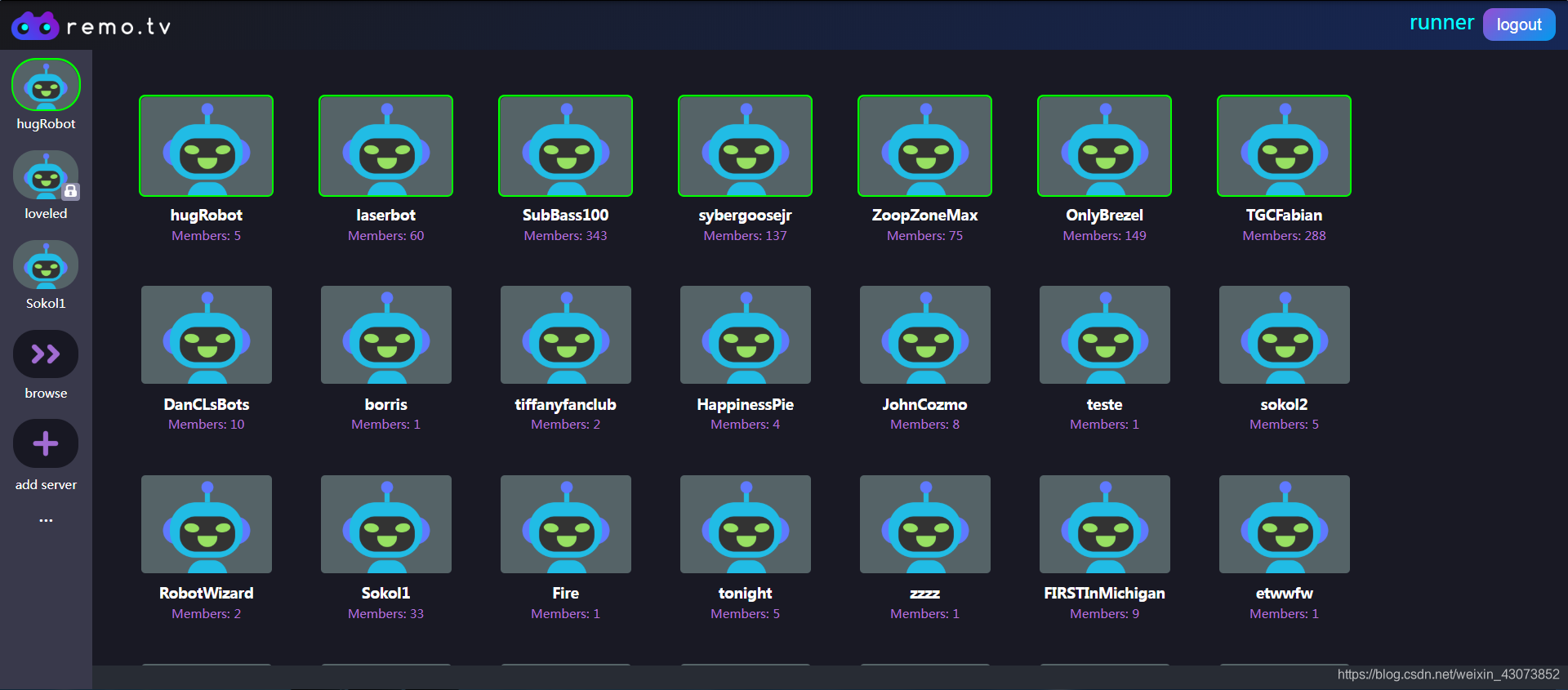
云端远程控制机器人是基于remo.tv开源项目平台,上面有众多爱好者将自己的机器人连接到品台上,供大家远程操控体验。
三、工作原理
首先在树莓派上按照网站教程布置相应环境,树莓派与RoboTerra机器人之间通过串口通信,相应的树莓派操作系统安装及环境配置可以查看前期文章:https://blog.csdn.net/weixin_43073852/article/details/82750343
云平台配置
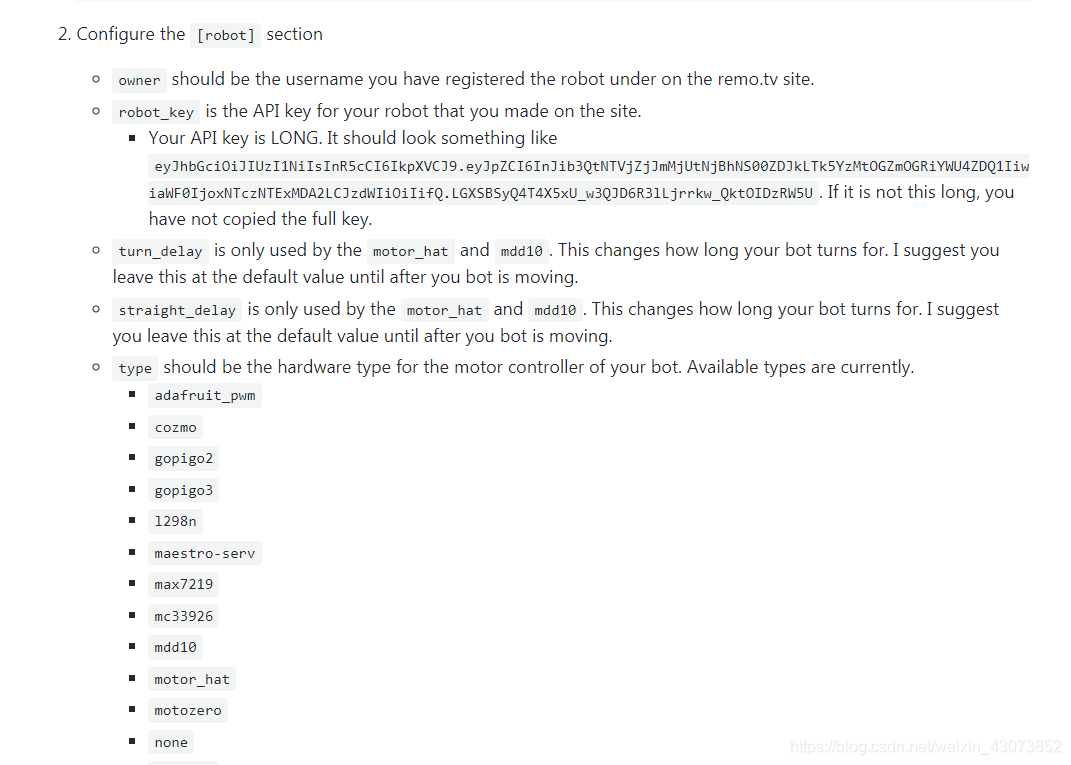
按照开源代码:https://github.com/remotv/controller中README.md相关文档说明操作即可,其中主要是配置文件的修改,根据自己的实际机器人型号选择对应的配置类型即可。
四、机器人展示
最终做了一个拥抱机器人,想着因为疫情不能接触,就用机器人来代替我们之间的拥抱,这样别人就可以通过远程控制给我们一个大大的拥抱。
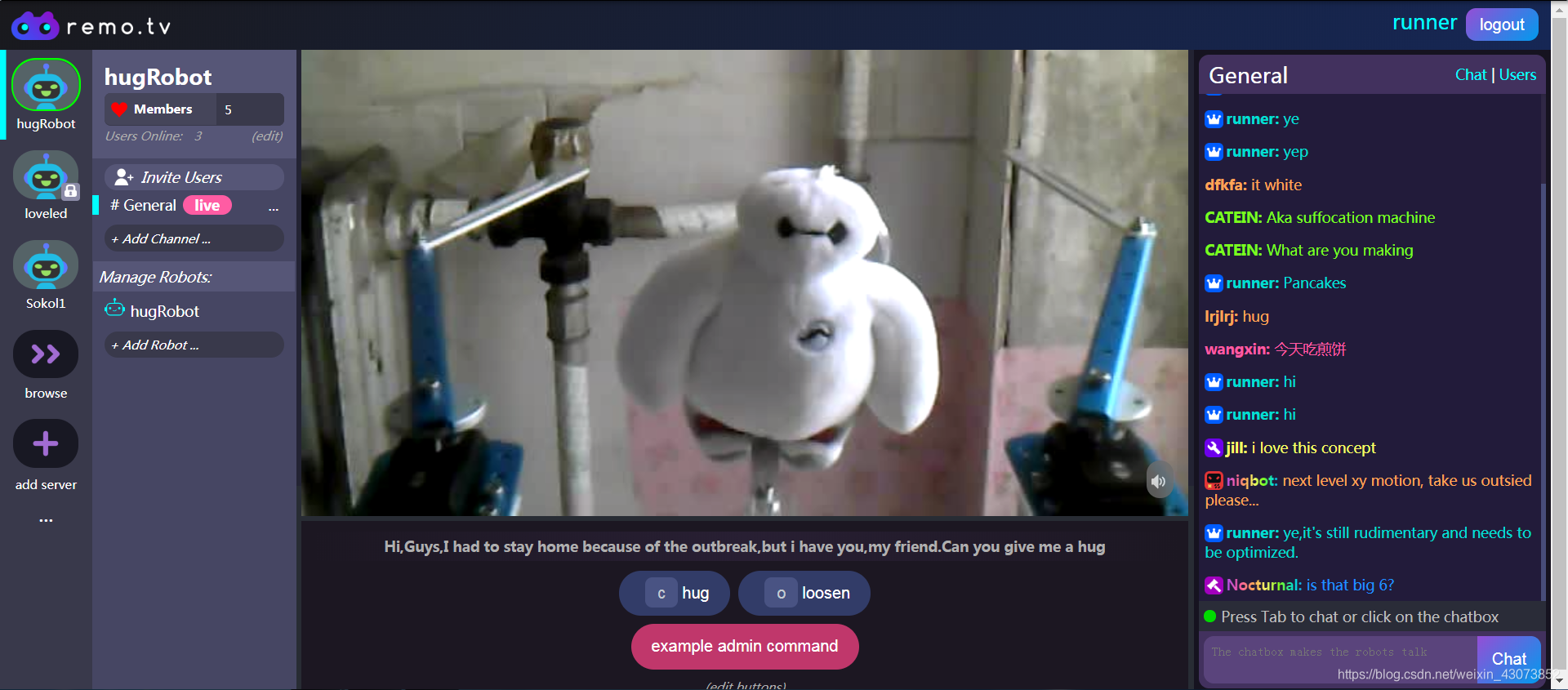
机器人暂时还比较丑,只有一双机械手臂,还需要优化更加人性化。
关于相关项目,可以加入微信机器人爱好者群进行交流。


















 1056
1056

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









