







3D视觉算法学习记录
ORB算法
ORB算法分为两部分,分别是特征点提取和特征点描述。特征提取是由FAST(Features from Accelerated Segment Test)算法发展来的,特征点描述是根据BRIEF(Binary Robust IndependentElementary Features)特征描述算法改进的。ORB特征是将FAST特征点的检测方法与BRIEF特征描述子结合起来,并在它们原来的基础上做了改进与优化。ORB算法最大的特点就是计算速度快。这首先得益于使用FAST检测特征点,FAST的检测速度正如它的名字一样是出了名的快。再次是使用BRIEF算法计算描述子,该描述子特有的2进制串的表现形式不仅节约了存储空间,而且大大缩短了匹配的时间。
特征点选取

计算特征描述子
BRIEF算法计算出来的是一个二进制串的特征描述符。它是在每一个特征点的邻域内,选择n对像素点pi、qi(i=1,2,…,n)。然后比较每个点对的灰度值的大小。如果I(pi)> I(qi),则生成二进制串中的1,否则为0。所有的点对都进行比较,则生成长度为n的二进制串。一般n取128、256或512,通常取256。
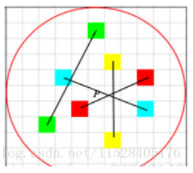 BRIEF描述子选取点对的时候,是以当前特征点为原点,以水平方向为X轴,以垂直方向为Y轴建立坐标系。当图片发生旋转时,坐标系不变,同样的取点模式取出来的点却不一样,计算得到的描述子也不一样,这是不符合我们要求的。ORB在计算BRIEF描述子时建立的坐标系是以特征点为圆心,以特征点和取点区域的形心的连线为X轴建立2维坐标系。这样一来,无论图像如何旋转,ORB选取点对的坐标系是固定的。在不同的旋转角度下,我们以同一取点模式取出来的点是一致的。这就解决了旋转一致性的问题(在一次处理中所有特征点的描述子都按同一组坐标取点)。
BRIEF描述子选取点对的时候,是以当前特征点为原点,以水平方向为X轴,以垂直方向为Y轴建立坐标系。当图片发生旋转时,坐标系不变,同样的取点模式取出来的点却不一样,计算得到的描述子也不一样,这是不符合我们要求的。ORB在计算BRIEF描述子时建立的坐标系是以特征点为圆心,以特征点和取点区域的形心的连线为X轴建立2维坐标系。这样一来,无论图像如何旋转,ORB选取点对的坐标系是固定的。在不同的旋转角度下,我们以同一取点模式取出来的点是一致的。这就解决了旋转一致性的问题(在一次处理中所有特征点的描述子都按同一组坐标取点)。
SRC
src(sparse representation-based classifier)表示稀疏编码形式,源于对大脑记忆方式的研究,应用于机器学习是则称为SRC方法。
ICP算法
ic
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3666
3666











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









