







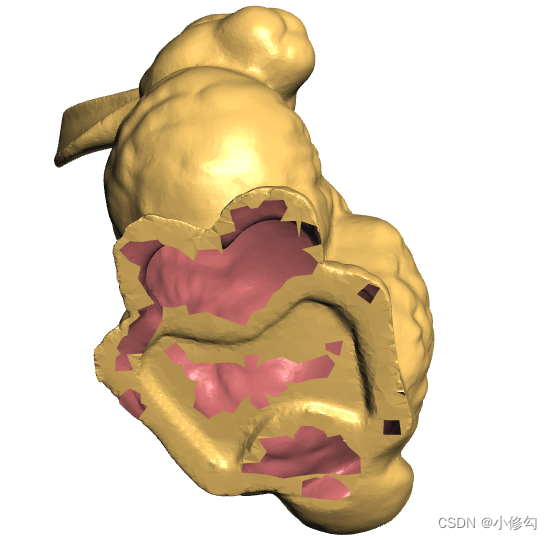
一、效果展示
二、代码
2.1参考链接:
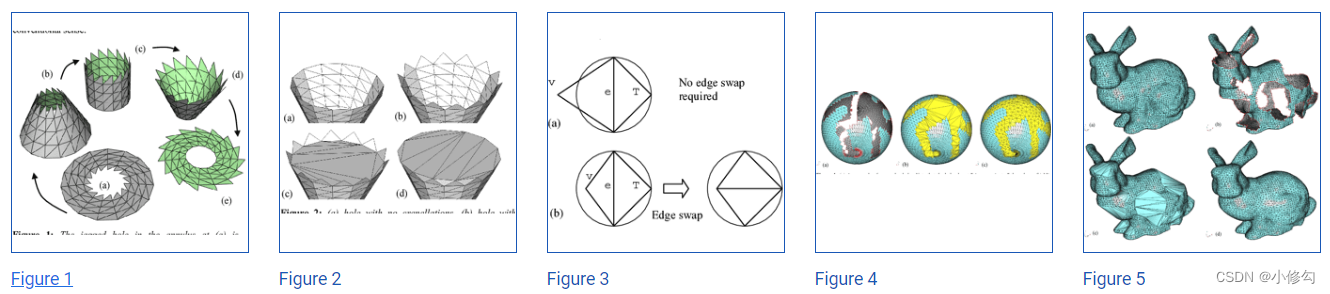
参考论文链接:Filling Holes in Meshes
2.2完整代码
#include <easy3d/viewer/viewer.h>
#include <easy3d/core/point_cloud.h>
#include <easy3d/fileio/point_cloud_io.h>
#include <easy3d/fileio/resources.h>
#include <easy3d/core/surface_mesh.h>
#include <easy3d/algo/surface_mesh_hole_filling.h>
#include <easy3d/renderer/renderer.h>
#include <easy3d/util/progress.h>
#include <easy3d/core/surface_mesh.h>
#include <easy3d/fileio/surface_mesh_io.h>
#include <easy3d/fileio/resources.h>
#include <easy3d/util/logging.h>
using namespace easy3d;
SurfaceMesh* hole_filliing_apply(SurfaceMesh* mesh,int size) {
if (!mesh)
return mesh;
const int allowed_boundary_size = size;
std::vector< std::pair<SurfaceMesh::Halfedge, int> > holes;
auto visited = mesh->add_halfedge_property<bool>("DialogSurfaceMeshHoleFilling::h::visited", false);
for (auto h : mesh->halfedges()) {
if (!visited[h] && mesh->is_border(h)) {
int size = 0;
SurfaceMesh::Halfedge hh = h;
do {
visited[hh] = true;
++size;
if (!mesh->is_manifold(mesh->target(hh))) {
size += 123456;
break;
}
hh = mesh->next(hh);
} while (hh != h);
if (size < allowed_boundary_size) {
holes.push_back({ h, size });
}
}
}
mesh->remove_halfedge_property(visited);
int num_closed = 0;
ProgressLogger progress(holes.size(), true, false);
for (const auto& hole : holes) {
if (progress.is_canceled()) {
LOG(WARNING) << "hole filling cancelled";
return mesh;
}
SurfaceMeshHoleFilling hf(mesh);
hf.fill_hole(hole.first);
++num_closed;
progress.next();
}
if (holes.empty()) {
LOG(WARNING) << "no holes found in the model";
}
else {
LOG(INFO) << num_closed << " (out of " << holes.size() << ") holes filled";
}
return mesh;
}
int main(int argc, char** argv)
{
//加载点云路径
const std::string file_in_name = "bunnyhole1.obj";
std::cout << "filename: " << file_in_name << std::endl;
const std::string file_out_name ="bunny_fix.obj";
SurfaceMesh* mesh = SurfaceMeshIO::load(file_in_name);
//---孔洞填充--
auto mesh_out=hole_filliing_apply(mesh,100);
SurfaceMeshIO::save(file_out_name, mesh_out);
//----可视化----
Viewer viewer("viewer");
viewer.add_model(mesh_out);
viewer.run();
return 0;
}
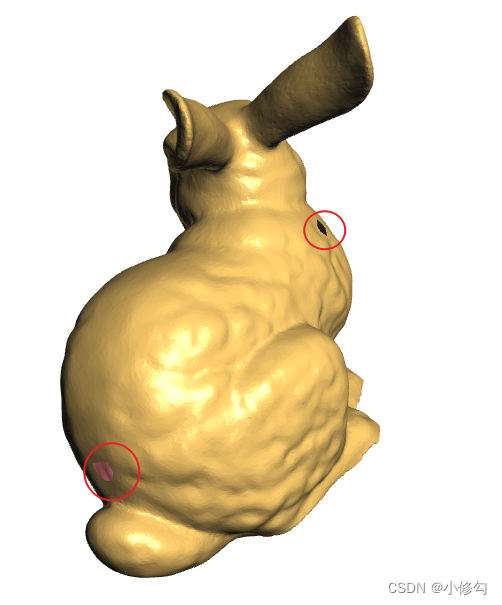
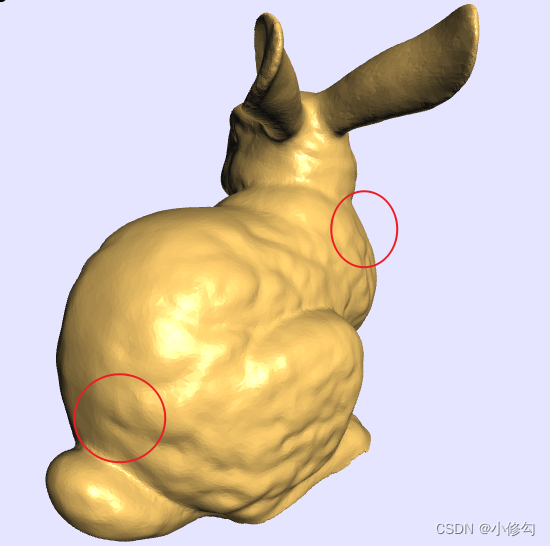
三、其他效果
多个孔洞点云填充效果对比
四、后续
后续会将easy3d中相关算法集成到《Easy3d+QT》专栏中。















 6952
6952











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











