







飞控冗余
以下是在一个飞机上安装两个PX4飞控实现飞控冗余的相关步骤:
一、硬件连接
电源连接
两个飞控都需要连接到飞机的电源系统。确保电源供应稳定且能够满足两个飞控的功率需求。可以使用分线器或者独立的电源线路为每个飞控供电,但要注意电源的一致性,例如相同的电压和电流特性。
例如,如果飞机使用的是锂电池,将电池的输出分别连接到两个飞控的电源输入端口,并且在连接线路上添加适当的滤波电容以减少电源噪声。
传感器连接
对于一些关键传感器,如加速度计、陀螺仪、气压计等,可以采用共享的方式。将传感器的输出信号通过信号分配器或者多路复用器分别连接到两个飞控的相应传感器输入端口。
例如,对于加速度计,使用一个三路分配器,将加速度计的X、Y、Z轴信号分别分配到两个飞控的加速度计输入引脚。
执行器连接(如电机、舵机等)
执行器的控制线路需要特殊设计。一种方法是使用继电器或者电子开关电路。正常情况下,主飞控控制执行器,当主飞控出现故障时,通过切换电路将执行器的控制权转移到备用飞控。
例如,对于电机控制,可以使用一个双刀双掷继电器。继电器的公共端连接到电机的控制信号线,常闭端连接到主飞控的电机输出引脚,常开端连接到备用飞控的电机输出引脚。在正常飞行时,继电器处于常闭状态,主飞控控制电机;当需要切换到备用飞控时,触发继电器切换到常开端。
二、QGC平台设置
飞控识别与配置
首先,将两个飞控分别连接到QGC平台(通过USB或者其他合适的通信接口)。在QGC中,应该能够识别出两个不同的飞控设备。
对每个飞控进行单独的基本配置,如设置飞控类型为PX4、校准传感器等基本操作。
冗余切换设置
在QGC的高级设置或者特定的冗余设置选项中(如果存在),定义主飞控和备用飞控。
设置故障检测机制,例如,可以通过监测飞控的心跳信号(如果支持)或者关键传感器数据的有效性来判断主飞控是否出现故障。当检测到主飞控故障时,触发切换操作,将控制权转移到备用飞控。
例如,可以设置一个定时器,每隔一定时间检查主飞控的传感器数据更新情况,如果在一定时间内没有收到有效的更新数据,则认为主飞控出现故障并进行切换。
需要注意的是,这种双飞控冗余系统的设计和实现需要对PX4飞控系统、飞机的电子系统以及相关的航空安全标准有深入的了解。在实际应用中,还需要进行大量的测试以确保系统的可靠性和安全性。同时,这种修改可能涉及到航空法规和相关标准的遵循,特别是在商业或者载人飞行应用场景下。
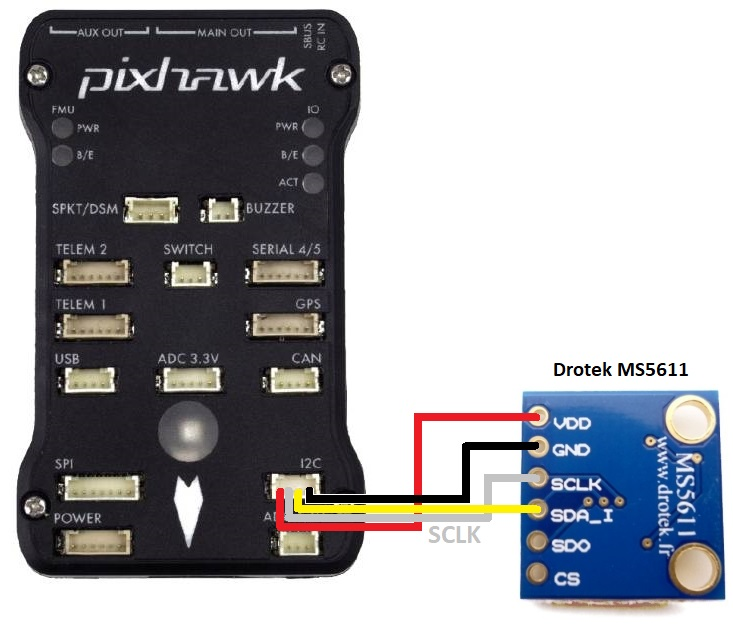
外置气压计
- 外置的好处就是可以把气压计自定义安装不收气流干扰的地方;
- 已适配的型号
MS5611
BMP280 - 通过I2C连接飞控
- 参数
MS5611:BARO_PROBE_EXT = 4
BMP280:BARO_PROBE_EXT = 2
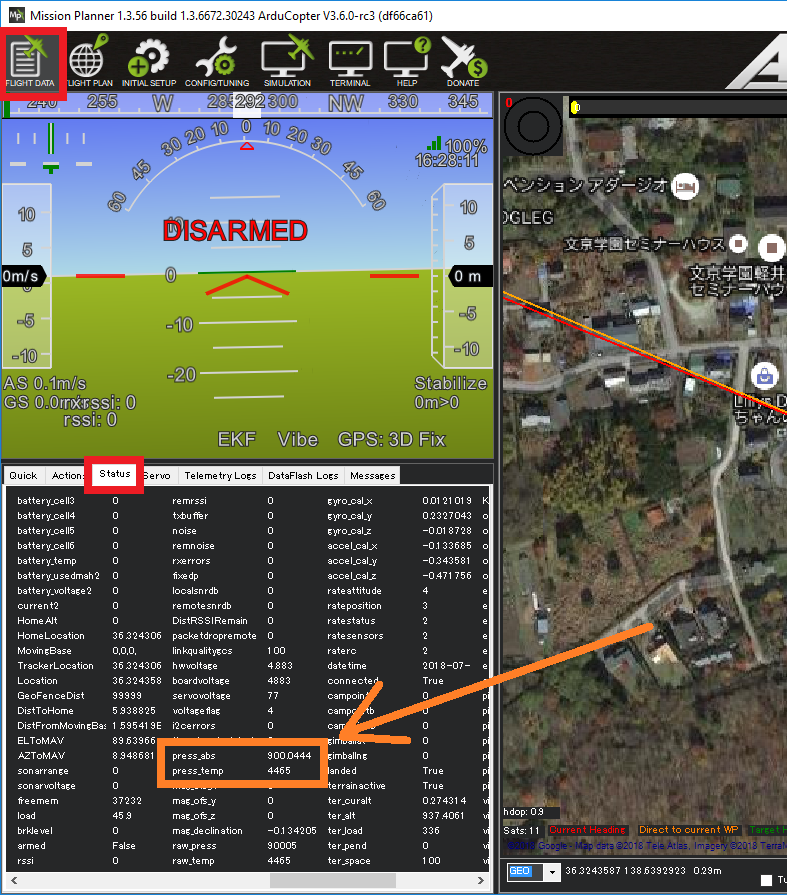
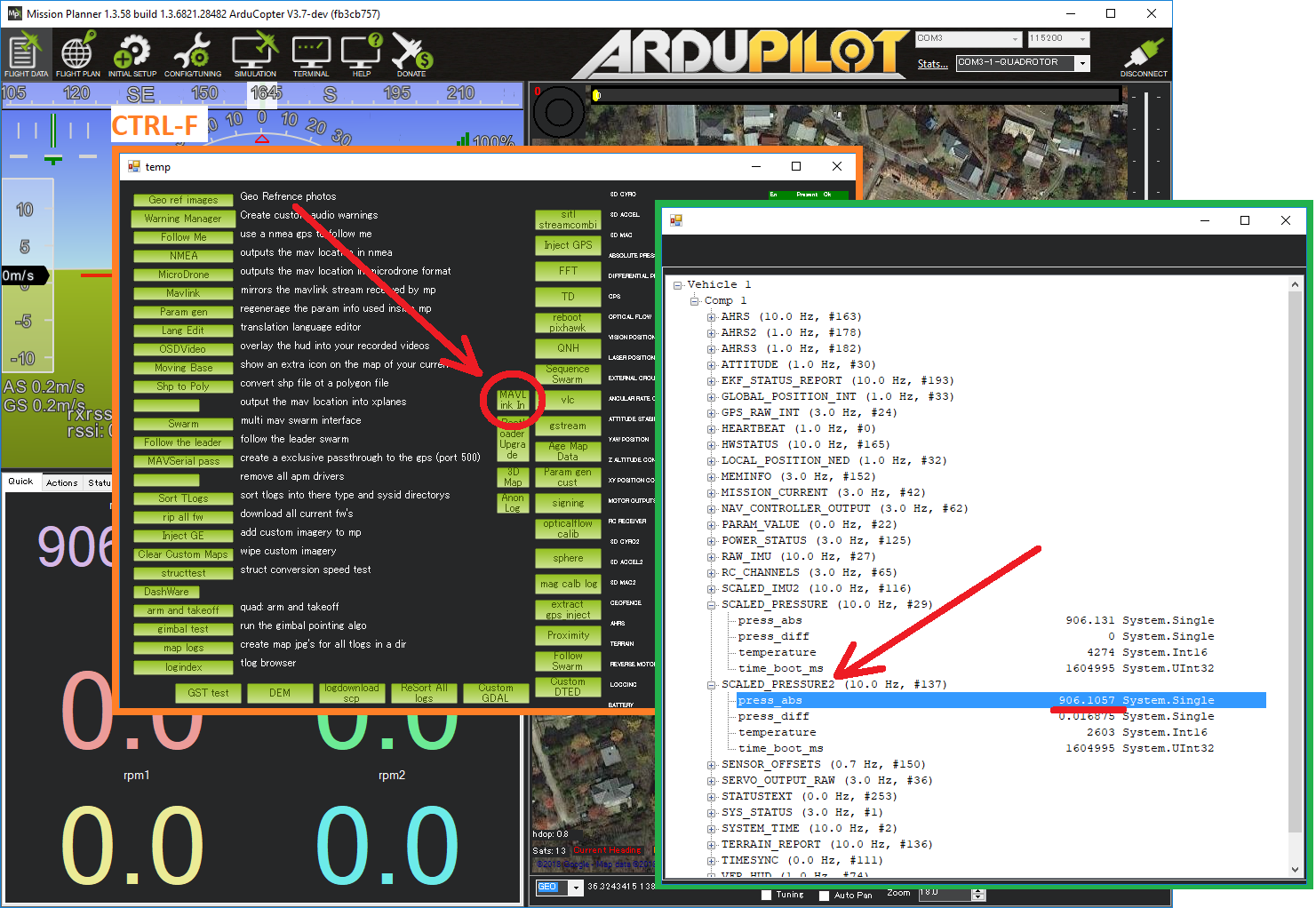
使用外置气压计:BARO_PRIMARY = 1 - 测试
- https://ardupilot.org/copter/docs/common-baro-external.html
使用外置AHRS系统
- AHRS: 位姿估计系统;
- AHRS 系统:提供姿态信息、位置信息;
- AHRS 类调用了EKF3类;
- 目前适配了这些外部AHRS:
- MicroStrain 3DM® Series
- VectorNav
- Inertialabs INS-P
- https://ardupilot.org/copter/docs/common-external-ahrs.html


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









