







不多说先上代码:https://github.com/lsk-gith/robot_dynamic_identify.git
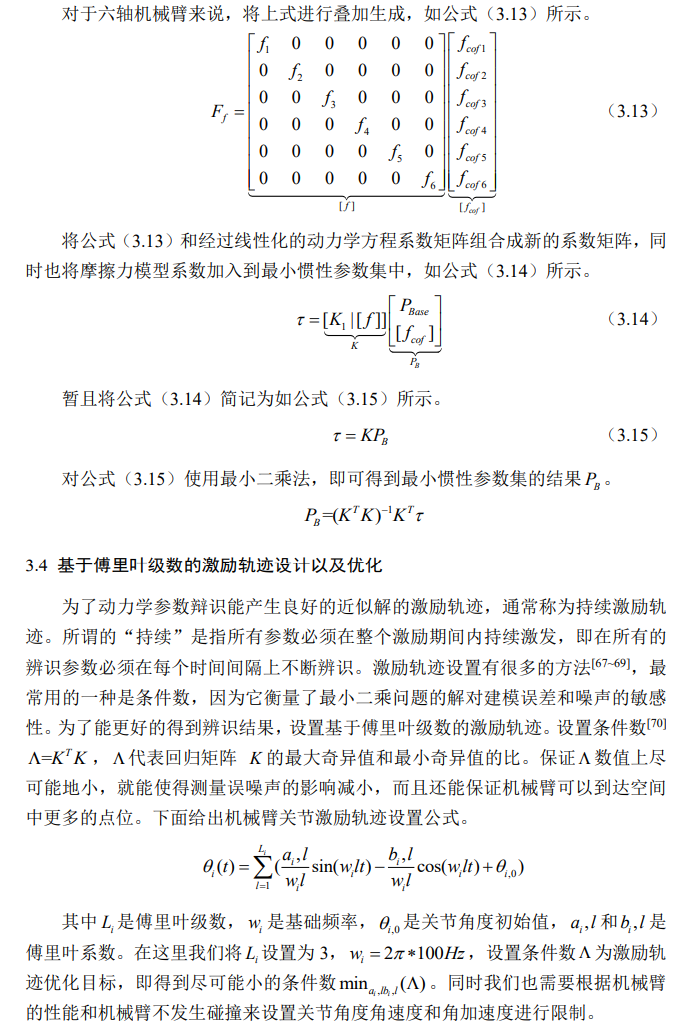
动力学参数
动力学参数一般是指转动惯量,质量,质心位置,这个三个组合起来有10个参数要辨识对于一个连杆来说,其中转动惯量是一个3X3的对称矩阵,所以是6个参数,质量m是一个参数,质心位置xyz是三个参数。
动力学参数辨识使用最小二乘法得到要辨识的参数,总体思想即使一个线性拟合的过程。

其中对于基于最小惯性参数集的MCG项分离工作,代码里面也有。
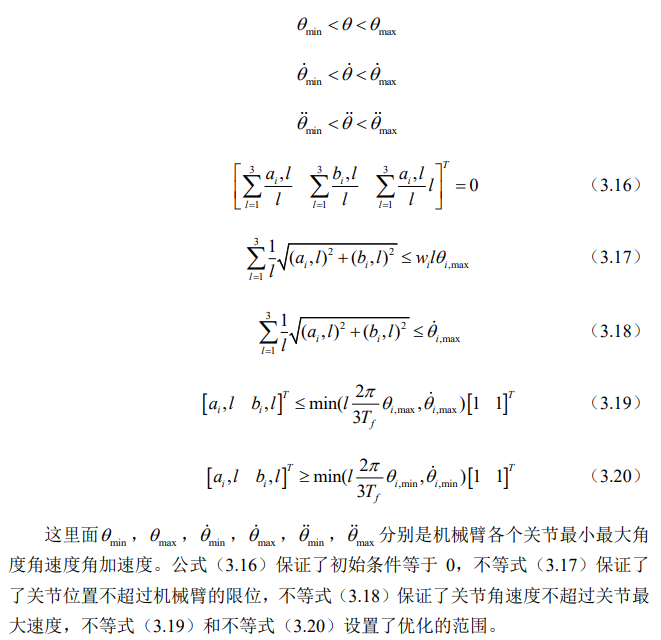
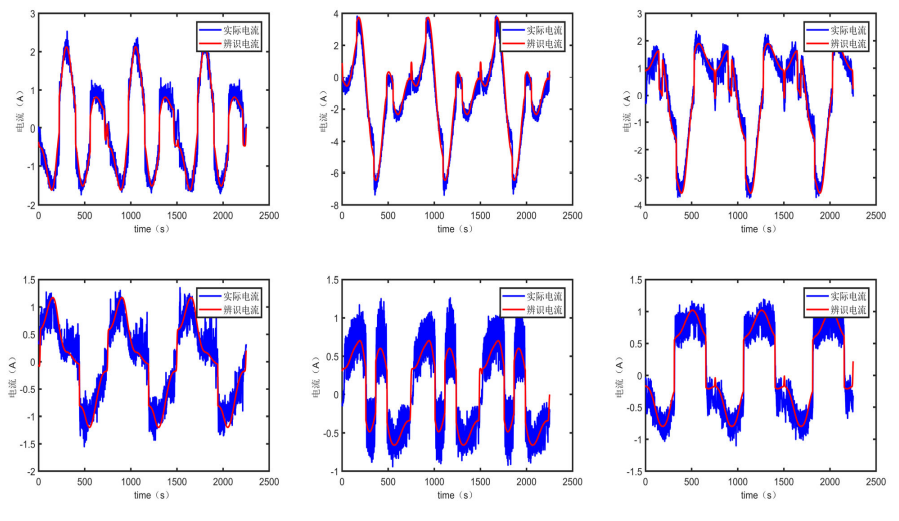
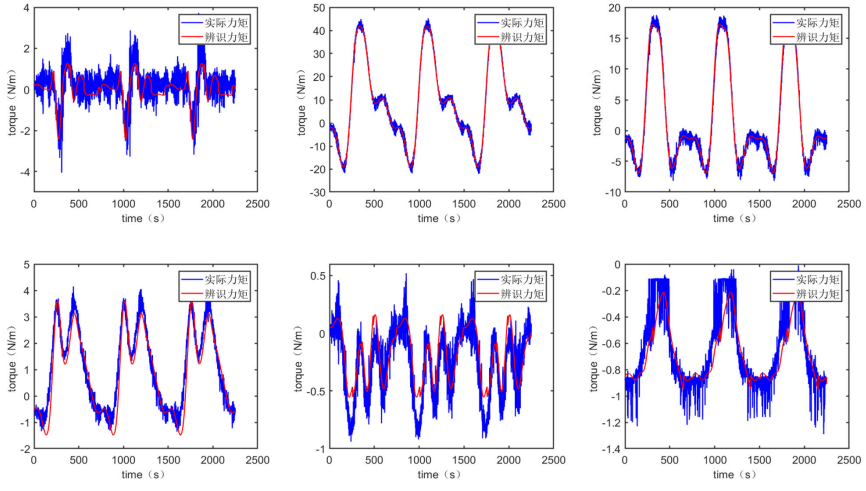
参数辨识结果对比
链接:https://pan.baidu.com/s/17HlzKa4OhyrnP9W5d5fgeg
提取码:vca3
















 6234
6234











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











