







1、错误界定
在介绍busoff内容之前,需要先介绍错误界定,了解CAN控制器是怎么进入busoff状态的。为了避免总线被永久错误节点卡死,需要一种机制来进行鉴别并限制其功能,当节点报错到达一定状态后允许其退出总线通信进行busoff状态,这就是错误界定。
定义:每个节点都含有REC和TEC。REC:接收错误计数器;TEC:发送错误计数器。
- 发送错误产生,TEC增加;正确发送一帧,TEC减少;
- 接收错误产生,REC增加;正确接收一帧,REC减少;
- 节点复位时,两者清0。
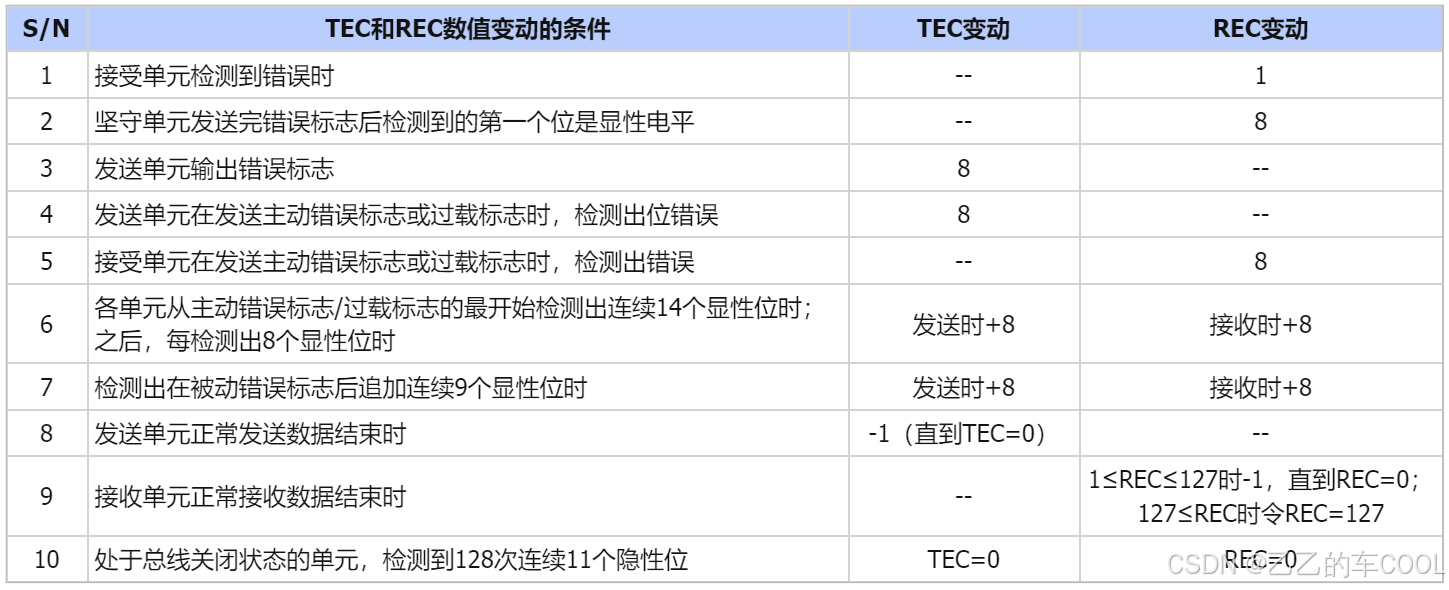
这里需要注意的是TEC/REC错误累计规则,不能简单的理解为出错+1,正确-1。具体错误累计规则如下表。
2、节点状态
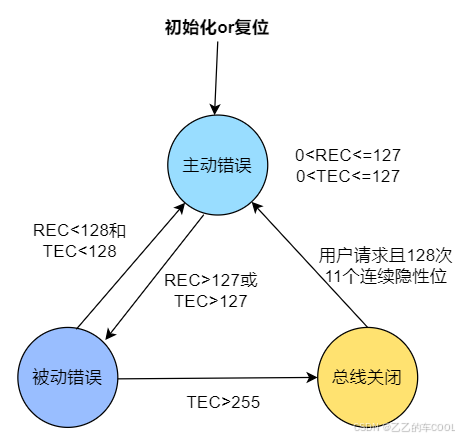
CAN节点分为三种状态:主动错误、被动错误、总线关闭。三种状态间的切换条件在下图中做出了说明。
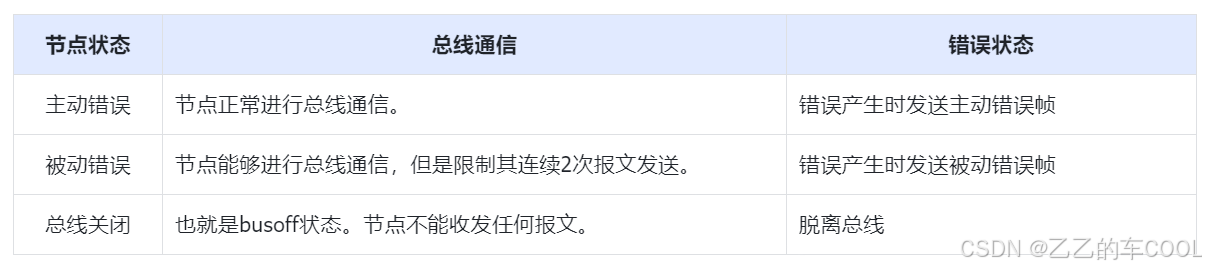
不同状态下的节点特性如下表:
3、busoff测试分析
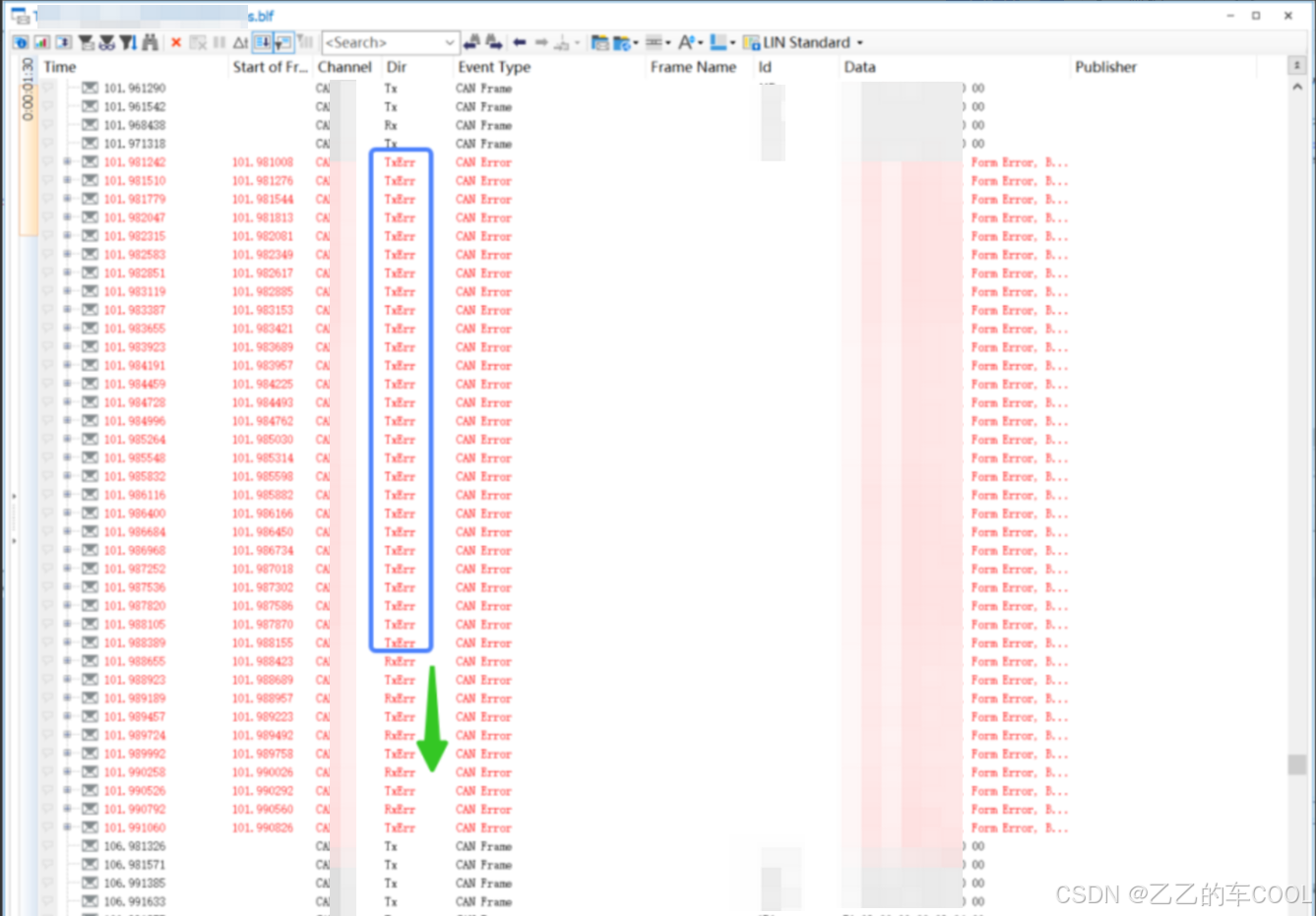
背景:硬件上选用VN6501进行,通过在vTESTstudio中搭建自动化测试脚本进行busoff测试。使用CANoe进行干扰DUT发送的所有报文,使DUT连续4次busoff。实际制造4次busoff失败。
思考:Trace窗口的log可以看出制造busoff时刻都是TxErr,只有几帧RxErr。思考为什么制造BUSOFF会有TxErr?
分析:理论上想要仿真制造DUT busoff状态,在唤醒DUT后需要对DUT发出的报文进行干扰(对CANoe来说就是Rx报文)。按照测试脚本逻辑,制造busoff时会停发仿真报文(Tx报文停发),此时总线上仍然存在TxErr可能是IG模块中在仿真发送报文。检查IG模块确实存在仿真报文的发送,关闭IG仿真报文后进行测试,DUT busoff正常。主要原因是TxErr导致了通信接口卡busoff,而不是DUT busoff。

















 8775
8775

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









