







 超级会员免费看
超级会员免费看
目录
1、概述
A2L文件是基于ASAP2标准制定的用来描述ECU内存的数据库文件,保存了标定系统与ECU通信的配置参数和ECU内部数据单元的详细信息。
A2L文件组成
1、A2L头文件:项目配置信息等,一般不随软件编译变化。
2、标定变量描述:地址信息可能经常变化。
3、观测变量描述:地址信息可能经常变化。
4、辅助信息:例如转换公式,一般不随软件编译变化。
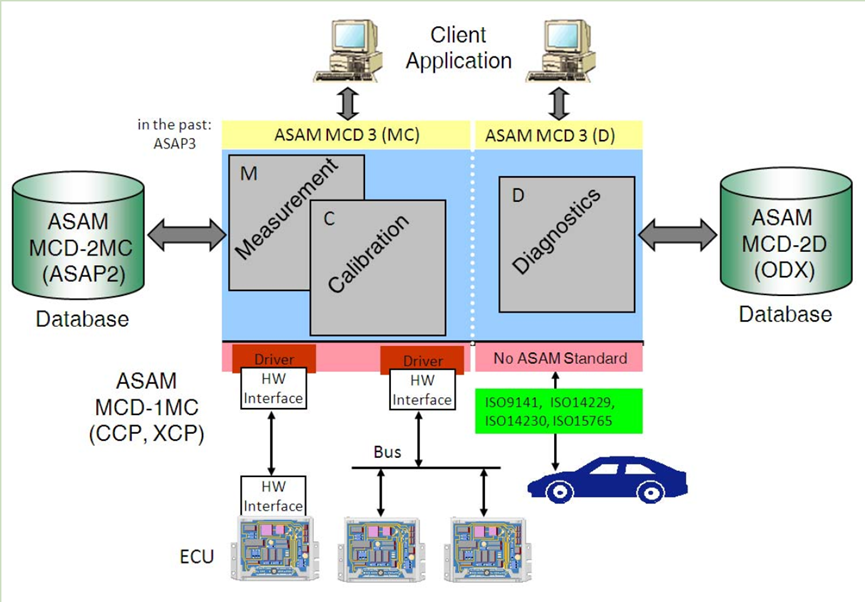
ASAM汽车电子产品的MCD标准在3层系统中结构如下
目录
A2L文件是基于ASAP2标准制定的用来描述ECU内存的数据库文件,保存了标定系统与ECU通信的配置参数和ECU内部数据单元的详细信息。
A2L文件组成
1、A2L头文件:项目配置信息等,一般不随软件编译变化。
2、标定变量描述:地址信息可能经常变化。
3、观测变量描述:地址信息可能经常变化。
4、辅助信息:例如转换公式,一般不随软件编译变化。
ASAM汽车电子产品的MCD标准在3层系统中结构如下
 2607
2136
1万+
7776
1413
2607
2136
1万+
7776
1413











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文
























