







 DWA算法是一种基于预测控制的局部路径规划方法,适用于室内机器人如扫地机器人,它在速度空间中采样并评估轨迹以避开障碍。尽管在自动驾驶中可能不适用,但其采样和评价函数的思想仍有价值。文章提到了将车辆控制转化为线速度和角速度,通过运动约束选择最优路径,与Latticeplanner和Emplanner有相似思路。
DWA算法是一种基于预测控制的局部路径规划方法,适用于室内机器人如扫地机器人,它在速度空间中采样并评估轨迹以避开障碍。尽管在自动驾驶中可能不适用,但其采样和评价函数的思想仍有价值。文章提到了将车辆控制转化为线速度和角速度,通过运动约束选择最优路径,与Latticeplanner和Emplanner有相似思路。
引言
本文主要是转载学习的内容,为了记录传统算法的学习,方便复习,对比看看传统算法和新的算法有哪些相似的地方。
DWA算法,在仿真上效果好些,在扫地机器人等室内机器人方面可能效果好,但是在自动驾驶还是不太合适。但是采样和评价函数的思想在自动驾驶领域的应用还是挺多的。
1. 介绍
动态窗口算法(Dynamic Window Approaches, DWA) 是基于预测控制理论的一种次优方法,因其在未知环境下能够安全、有效的避开障碍物, 同时具有计算量小, 反应迅速、可操作性强等特点。DWA算法属于局部路径规划算法。
DWA算法(dynamic window approach)是移动机器人在运动模型下推算(v,w)对应的轨迹,确定速度采样空间或者说是动态窗口(三种限制);在速度空间(v,w)中采样多组速度,并模拟这些速度在一定时间内的运动轨迹,通过一个评价函数对这些轨迹打分,选取最优的轨迹来驱动机器人运动。
对于无人驾驶汽车而言,情况类似,将车辆的位置变化转化为线速度和角速度控制,避障问题转变成空间中的运动约束问题,这样可以通过运动约束条件选择局部最优的路径。
下面是一个大佬的博客,看完基本理解DWA算法。
【路径规划】局部路径规划算法——DWA算法(动态窗口法)|(含python实现 | c++实现)
贴个实验图:
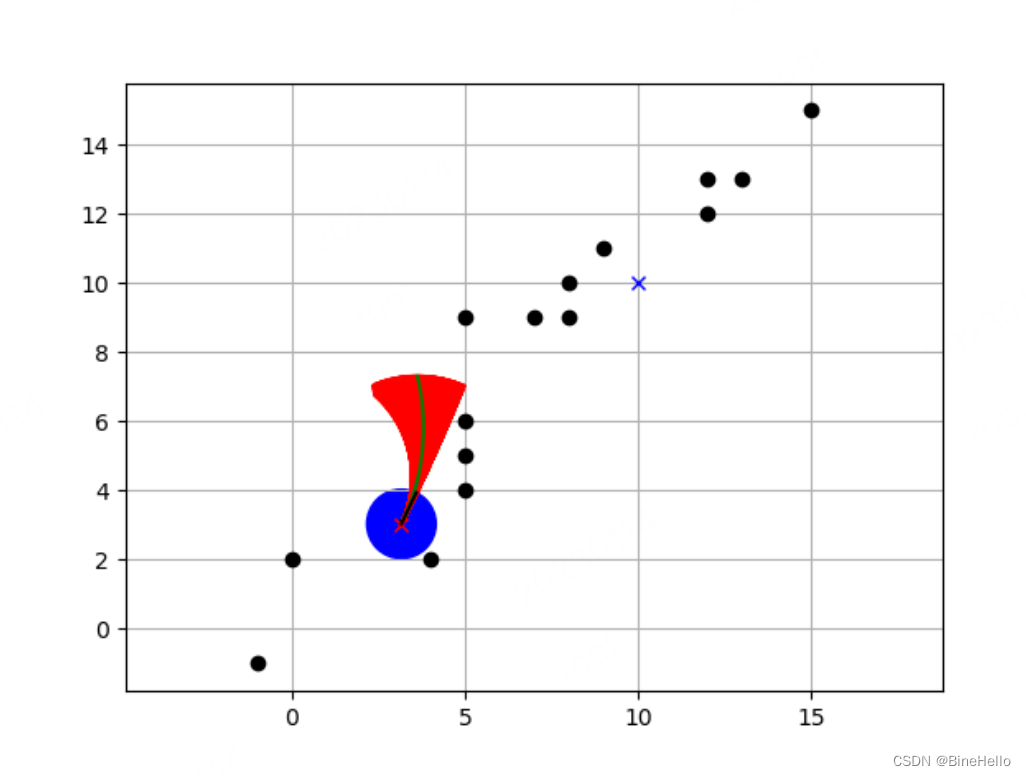
算法中的3步:
- 采样
- 生成轨迹
- 代价函数评估轨迹
感觉和Lattice planner和Em planner的思路有相似之处😊😊😊,后面学完这两个算法再看看。


















 4228
4228

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









