







CAN和CANFD报文区别
- RSS
CANFD不存在远程帧、CAN报文中的RTR被替换为RRS(远程请求代替位,默认值为0) - FDF
FDF位为0时为传统报文,为1时CANFD报文 - BRS
BRS位为0时CANFD速率保持恒定速率、BRS位为1时CANFD的数据段换到高速率 - 数据场
CAPL
- 关键设置参数
只要在定义message下面两个参数的值并设置为1时,即可发送CANFD报文

on timer myTimer
{
message * Msg;
Msg.id = 0x01;
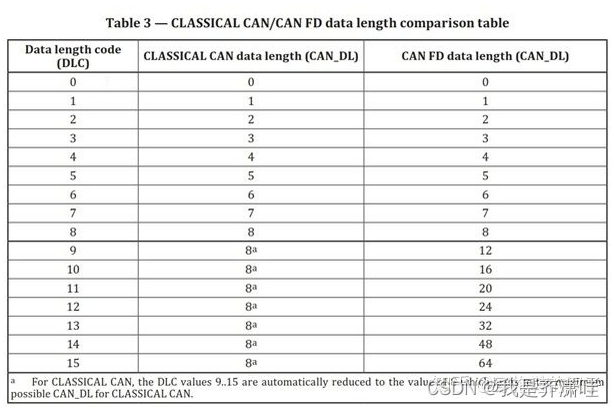
Msg.dlc= 15;
Msg.DataLength = 64;
Msg.FDF = 1; //重点
Msg.BRS = 1; //重点
Msg.byte(0) = 1; //第0个字节赋值为1;
Msg.byte(63) = 1; //第64个字节赋值为1;
output(Msg); //输出报文
setTimer(myTimer,10);
}















 8万+
8万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









