







一、理论基础
在TSP问题中,粒子的位置可以使用路径来表示,速度如何表示却是一个难题。基本粒子群算法的速度和位置更新公式不再适用,因此本文重新定义了速度和位置的更新公式。
基本粒子群算法速度位置更新公式:
V
i
d
k
+
1
=
ω
V
i
d
k
+
c
1
r
1
(
P
i
d
k
−
X
i
d
k
)
+
c
2
r
2
(
P
g
d
k
−
X
i
d
k
)
(1)
V_{id}^{k+1}=\omega V_{id}^k+c_1r_1(P_{id}^k-X_{id}^k)+c_2r_2(P_{gd}^k-X_{id}^k)\tag{1}
Vidk+1=ωVidk+c1r1(Pidk−Xidk)+c2r2(Pgdk−Xidk)(1)
X
i
d
k
+
1
=
X
i
d
k
+
V
k
+
1
i
d
(2)
X_{id}^{k+1}=X_{id}^k+V_{k+1_{id}}\tag {2}
Xidk+1=Xidk+Vk+1id(2)
本文重新定义了速度,以及三个运算规则:位置-位置,常数×速度,位置+速度
速度
速度定义为交换序列,
p
o
s
i
t
i
o
n
1
+
v
e
l
o
c
i
t
y
=
p
o
s
i
t
i
o
n
2
position1+velocity=position2
position1+velocity=position2意思是
p
o
s
i
t
i
o
n
1
position1
position1通过
v
e
l
o
c
i
t
y
velocity
velocity(速度)这个交换序列变成
p
o
s
i
t
i
o
n
2
position2
position2,速度中每一个索引对应的数字表示为
p
o
s
i
t
i
o
n
1
position1
position1中索引为该数字的城市与
p
o
s
i
t
i
o
n
1
position1
position1中索引为速度索引的城市对调,例如:
p
o
s
i
t
i
o
n
1
=
[
5
4
3
2
1
]
,
p
o
s
i
t
i
o
n
2
=
[
1
2
3
4
5
]
position1=[5\,4\,3\,2\,1],position2=[1\,2\,3\,4\,5]
position1=[54321],position2=[12345]由于
p
o
s
i
t
i
o
n
2
(
1
)
=
p
o
s
i
t
i
o
n
1
(
5
)
position2(1)=position1(5)
position2(1)=position1(5)因此
p
o
s
i
t
i
o
n
1
(
1
)
position1(1)
position1(1)与
p
o
s
i
t
i
o
n
1
(
5
)
position1(5)
position1(5)互换位置,
v
e
l
o
c
i
t
y
(
1
)
=
5
velocity(1)=5
velocity(1)=5
交换位置之后:
p
o
s
i
t
i
o
n
1
=
[
1
4
3
2
5
]
,
p
o
s
i
t
i
o
n
2
=
[
1
2
3
4
5
]
position1=[1\,4\,3\,2\,5],position2=[1\,2\,3\,4\,5]
position1=[14325],position2=[12345]又因为
p
o
s
i
t
i
o
n
2
(
2
)
=
p
o
s
i
t
i
o
n
1
(
4
)
position2(2)=position1(4)
position2(2)=position1(4)因此
p
o
s
i
t
i
o
n
1
(
2
)
position1(2)
position1(2)与
p
o
s
i
t
i
o
n
1
(
4
)
position1(4)
position1(4)互换位置,
v
e
l
o
c
i
t
y
(
2
)
=
4
velocity(2)=4
velocity(2)=4
交换位置之后:
p
o
s
i
t
i
o
n
1
=
[
1
2
3
4
5
]
,
p
o
s
i
t
i
o
n
2
=
[
1
2
3
4
5
]
position1=[1\,2\,3\,4\,5],position2=[1\,2\,3\,4\,5]
position1=[12345],position2=[12345]又因为
p
o
s
i
t
i
o
n
2
(
3
)
=
p
o
s
i
t
i
o
n
1
(
3
)
position2(3)=position1(3)
position2(3)=position1(3)因此
p
o
s
i
t
i
o
n
1
(
3
)
position1(3)
position1(3)与
p
o
s
i
t
i
o
n
1
(
3
)
position1(3)
position1(3)互换位置(相当于没做),
v
e
l
o
c
i
t
y
(
3
)
=
3
velocity(3)=3
velocity(3)=3
由此可以推导,
v
e
l
o
c
i
t
y
=
[
5
4
3
4
5
]
velocity=[5\,4\,3\,4\,5]
velocity=[54345]
定义
p
o
s
i
t
i
o
n
2
−
p
o
s
i
t
i
o
n
1
position2-position1
position2−position1即为速度。
常数×位置
定义为:速度中的每一个值以该常数的概率保留,避免过早陷入局部最优解。
二、MATLAB程序实现
1、问题描述
TSP(traveling salesman problem,旅行商问题)是典型的NP完全问题,即其最坏情况下的时间复杂度随着问题规模的增大按指数方式增长,到目前为止还未找到一个多项式时间的有效算法。
TSP问题可描述为:已知
n
n
n个城市相互之间的距离,某一旅行商从某个城市出发访问每个城市有且仅有一次,最后回到出发城市,如何安排才使其所走路线距离最短。简言之,就是寻找一条最短的遍历
n
n
n个城市的路径,或者说搜索自然子集
X
=
{
1
,
2
,
⋯
,
n
}
X=\{1,2,\dotsm,n\}
X={1,2,⋯,n}(
X
X
X的元素表示对
n
n
n个城市的编号)的一个排列
π
(
X
)
=
{
V
1
,
V
2
,
⋯
,
V
n
}
π(X)=\{V_1,V_2,\dotsm,V_n\}
π(X)={V1,V2,⋯,Vn},使得
T
d
=
∑
i
=
1
n
+
1
d
(
V
i
,
V
i
+
1
)
+
d
(
V
n
,
V
1
)
T_d=\sum_{i=1}^{n+1} {d(V_i,V_{i+1})}+d(V_n,V_1)
Td=i=1∑n+1d(Vi,Vi+1)+d(Vn,V1)取得最小值,其中
d
(
V
i
,
V
i
+
1
)
d(V_i,V_{i+1})
d(Vi,Vi+1)表示城市
V
i
V_i
Vi到城市
V
i
+
1
V_{i+1}
Vi+1的距离。
2、代码实现
- 计算粒子适应度函数
function fitness = fun(pop, citys, D)
%% 计算粒子适应度函数
% 输入:pop 粒子群位置 citys 城市坐标 D 距离矩阵
% 输出:fitness 粒子的适应度值
m = size(pop, 1);
n = size(citys, 1);
fitness = zeros(m, 1);
for i = 1:m
for j = 1:n-1
fitness(i) = fitness(i) + D(pop(i, j), pop(i, j+1));
end
fitness(i) = fitness(i) + D(pop(i, end), pop(i, 1));
end
- 记录将pop变成best的交换序列的函数
function change = position_minus_position(best, pop)
%% 记录将pop变成best的交换序列
for i = 1:size(best, 1)
for j = 1:size(best, 2)
change(i, j) = find(pop(i, :)==best(i, j)); % 找到最佳值索引
temp = pop(i, j);
pop(i, j) = pop(i, change(i, j));
pop(i, change(i, j)) = temp; % 交换
end
end
- 利用速度记录的交换序列进行位置修正的函数
function pop = position_plus_velocity(pop, V)
%% 利用速度记录的交换序列进行位置修正
for i = 1:size(pop,1)
for j = 1:size(pop,2)
if V(i, j) ~= 0
temp = pop(i, j);
pop(i, j) = pop(i, V(i,j));
pop(i, V(i,j)) = temp;
end
end
end
- 以一定概率保留交换序列的函数
function change = constant_times_velocity(constant, change)
%% 以一定概率保留交换序列
for i = 1:size(change, 1)
for j = 1:size(change, 2)
if rand > constant
change(i, j) = 0;
end
end
end
- 主函数
%% 1.清空环境变量
clear;
clc;
%% 2.导入数据
load citys_data.mat; % 数据集的变量名为citys
%% 3.计算城市间相互距离
n = size(citys, 1);
D = Distance(citys);
%% 4.初始化参数
c1 = 0.1; % 个体学习因子
c2 = 0.075; % 社会学习因子
w = 1; % 惯性权重
m = 500; % 粒子数量
pop = zeros(m, n); % 粒子位置
V = zeros(m,n); % 粒子速度
gen = 1; % 迭代计数器
maxgen = 2000; % 迭代次数
fitness = zeros(m, 1); % 适应度函数值
pbest = zeros(m, n); % 个体极值路径
fitnesspbest = zeros(m,1); % 个体极值
gbest = zeros(maxgen, n); % 群体极值路径
fitnessgbest = zeros(maxgen, 1); % 群体极值
Length_ave = zeros(maxgen, 1); % 各代路径的平均长度
ws = 0.9; % 惯性权重最大值
we = 0.4; % 惯性权重最小值
%% 5.产生初始粒子
% 随机产生粒子初始位置和速度
for i = 1:m
pop(i, :) = randperm(n);
V(i, :) = randperm(n);
end
% 计算粒子适应度函数值
fitness = fun(pop, citys, D);
% 计算个体极值和群体极值
fitnesspbest = fitness; % 个体极值适应度值
pbest = pop; % 个体极值
[fitnessgbest(1), min_index] = min(fitness);
gbest(1, :) = pop(min_index, :);
Length_ave(1) = mean(fitness);
%% 6.迭代寻优
while gen < maxgen
gen
%% 更新迭代次数与惯性权重
gen = gen+1;
w = ws - (ws-we)*(gen/maxgen)^2;
%% 更新速度
% 个体极值更新部分
change1 = position_minus_position(pbest, pop);
change1 = constant_times_velocity(c1, change1);
% 群体极值修正部分
change2 = position_minus_position(repmat(gbest(gen-1, :), m, 1), pop);
change2 = constant_times_velocity(c2, change2);
% 原速度部分
V = constant_times_velocity(w, V);
% 修正速度
for i = 1:m
for j = 1:n
if change1(i, j) ~= 0
V(i, j) = change1(i, j);
end
if change2(i, j) ~= 0
V(i, j) = change2(i, j);
end
end
end
%% 更新位置
pop = position_plus_velocity(pop, V);
%% 适应度函数值更新
fitness = fun(pop, citys, D);
%% 个体极值与群体极值更新
% 个体极值更新
for i = 1:m
if fitness(i) < fitnesspbest(i)
fitnesspbest(i) = fitness(i);
pbest(i, :) = pop(i, :);
end
end
% 群体极值更新
[minvalue, min_index] = min(fitness);
if minvalue < fitnessgbest(gen-1)
fitnessgbest(gen) = minvalue;
gbest(gen, :) = pop(min_index, :);
else
fitnessgbest(gen) = fitnessgbest(gen-1);
gbest(gen, :) = gbest(gen-1, :);
end
% 记录每代的平均路径长度
Length_ave(gen)=mean(fitness);
end
%% 7.结果显示
[Shortest_Length, index] = min(fitnessgbest);
Shortest_Route = gbest(index, :);
disp(['最短距离:' num2str(Shortest_Length)]);
disp(['最短路径:' num2str([Shortest_Route Shortest_Route(1)])]);
%% 8.绘图
figure(1)
plot([citys(Shortest_Route, 1); citys(Shortest_Route(1), 1)],...
[citys(Shortest_Route, 2);citys(Shortest_Route(1), 2)], 'o-', 'linewidth', 2);
grid on
for i = 1:size(citys,1)
text(citys(i, 1), citys(i, 2), [' ' num2str(i)]);
end
text(citys(Shortest_Route(1), 1), citys(Shortest_Route(1), 2),' 起点');
text(citys(Shortest_Route(end),1), citys(Shortest_Route(end), 2),' 终点');
xlabel('城市位置横坐标')
ylabel('城市位置纵坐标')
title(['粒子群算法优化路径(最短距离:' num2str(Shortest_Length) ')'])
figure(2)
plot(1:maxgen, fitnessgbest, 'b', 1:maxgen, Length_ave, 'r:', 'linewidth', 2);
legend('最短距离', '平均距离')
xlabel('迭代次数')
ylabel('路径距离')
title('各代最短距离与平均距离对比')
- 结果显示
Command Window中显示的结果为:
最短距离:17515.8526
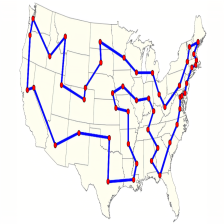
最短路径:1 15 14 12 30 29 11 13 7 2 4 19 17 18 3 10 9 8 16 5 6 23 24 25 20 21 22 26 28 27 31 1
- 绘图
粒子群算法优化路径变化如图1所示。


代码下载链接:https://download.csdn.net/download/weixin_43821559/85224716
三、参考文献
[1] Leung_ZY. 遗传算法、蚁群算法、粒子群算法解决TSP总结 matlab代码. CSDN博客.
[2] 心升明月. 基于粒子群优化算法的函数寻优算法. CSDN博客.
[3] Xia T, Guo W, Chen G. An Improved Particle Swarm Optimization for Data Streams Scheduling on Heterogeneous Cluster[C]. International Conference on Advances in Computation & Intelligence. Springer Berlin Heidelberg, 2007: 393-400.

















 1091
1091

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











