






一、归控模块开发依赖
在介绍这一部分之前,首先要搞明白什么是归控模块。归控,展开就是规划控制,其中规划是根据目前的已知信息,决定自己要进行哪一个操作,而控制指的是依据自己的规划,做出相应的动作。举个例子,人站在变绿的红绿灯前面,人看见了灯的变化,这属于感知,看见后大脑作出反应,决定要过马路,这属于规划,人决定过马路于是要迈步往前,迈步向前则属于控制。
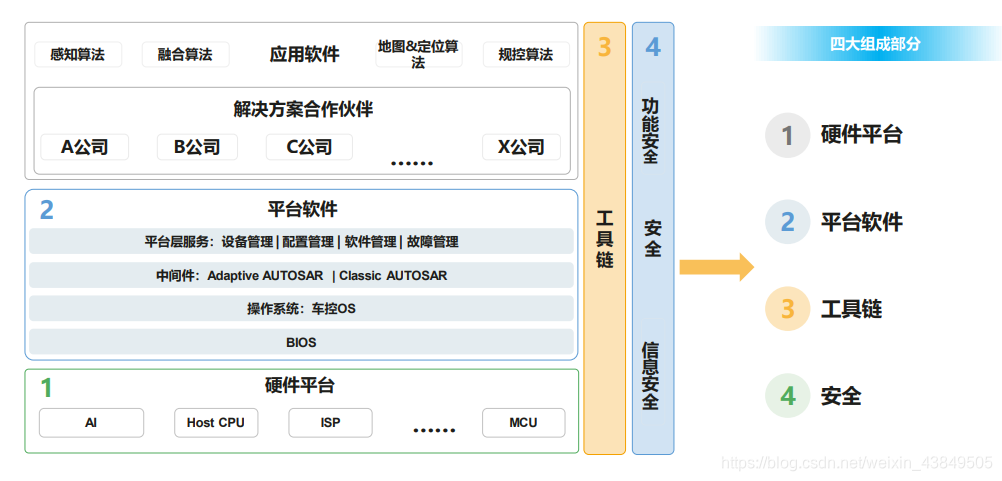
而对于MDC计算平台而言,规划控制主要还是依赖于平台的四大组成部分:硬件平台、软件平台、工具链以及安全控制。
二、归控模块开发总流程
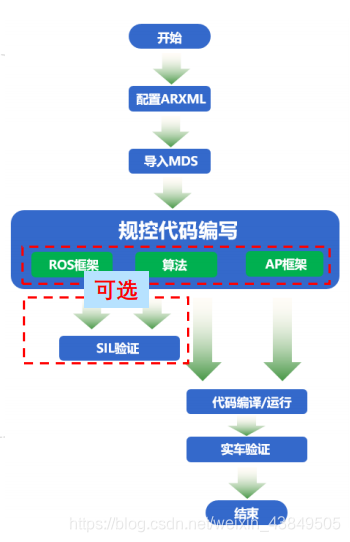
与前面的感知融合模块类似,大体的步骤都是先编写ARXML文件,之后导入MDS生成代码,编写程序后导入到MDC平台上,最后运行得到返回结果。区别在于归控的开发,编码时有一种备选的方式,是将代码剥离,即不采用实车的检验,而是在虚拟环境下模拟,这种情况是要将AP框架和ROS框架剥离,具体的会在下面介绍。
三、规划模块应用层框架样例
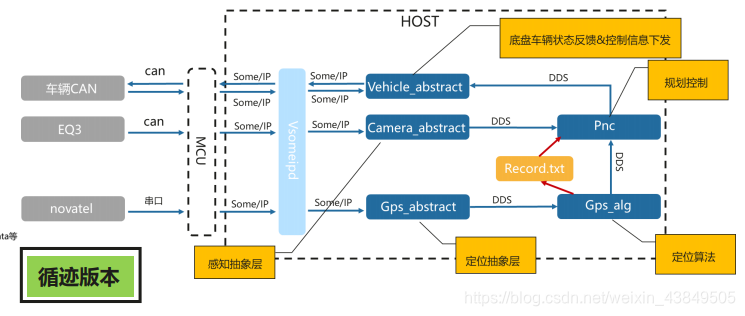
这一部分简单举例了两个应用层的框架,首先是一个比较基本的寻迹版本,这个版本是按照给定的一些点进行规划,是一个比较基础的版本。
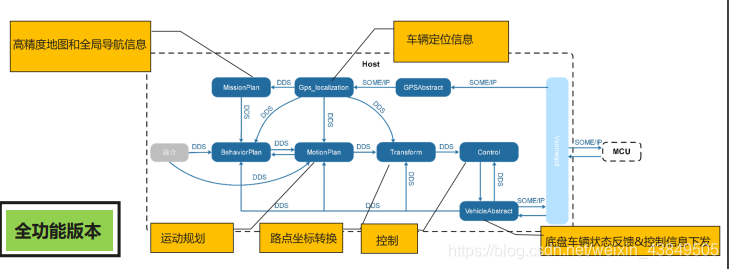
在此之上,还有一个进阶版本称为全功能版本,这个版本不再是固定的点,而是将寻迹版本中的点换为高精度地图和全局导航信息。
四、归控实例节点开发
这一部分则演示了一个归控节点的开发,ARXML文件的配置就不再重复了,依然是配置数据类型、通信协议等内容。将配置好的ARXML文件导入MDS并生成代码,完成代码的编写后,就进入算法的验证阶段,这里主要记录一下算法验证。
一般为了归控模块开发的高效性以及安全性,都会在实车调试之前进行一个多场景下的仿真测试,测试算法的运行是否正确。现在大多数的仿真测试平台都是X86架构的,而MDC是arm架构的,所以采用这种剥离的方式,测试代码而不区分框架。
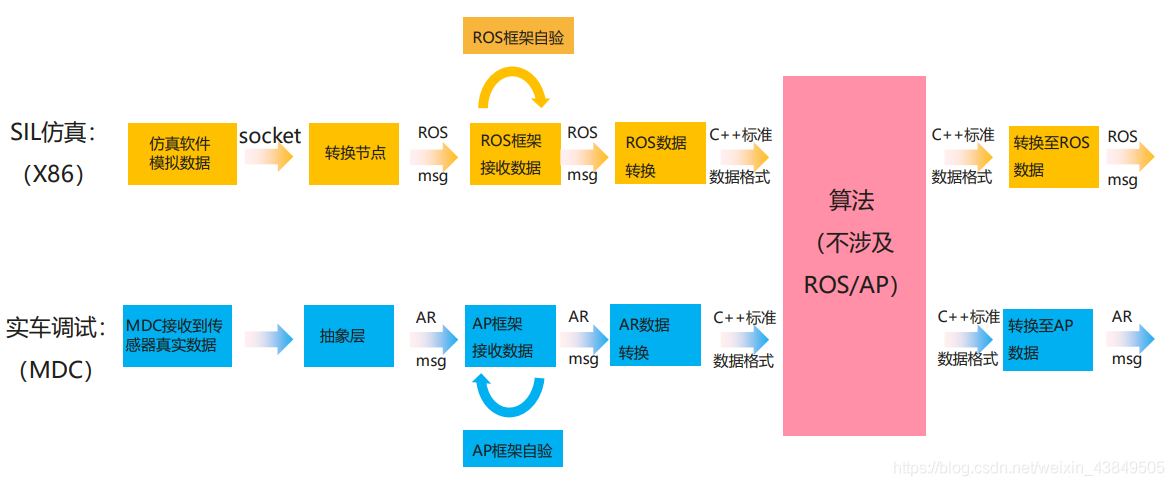
上图所示的就是一个验证的基本流程,在SIL仿真中,通过转换节点得到ROS的信息,之后将ROS的数据转换为C++的标准数据格式,这样就可以进行单纯的算法的验证,验证之后再换为ROS数据继续下一步。
五、归控方案介绍
目前的轨迹规划主要有四种主流的技术路线:

下面主要介绍一下第一种方式。第一种方式主要是两部分:BP和MOP。
其中BP指的是行为决策,即根据时间、空间范围的安全性、效率性、舒适性、利他性等因素,进行行为的状态的转移,简单来说就是决定采取怎样的行为。展开来说BP首先需要世界认知,即感知周围的环境,之后进行预处理,根据预处理的结果决定顶层状态迁移,而顶层状态的迁移可以拆分为许多的基元状态,实现这些小的基元状态就称为基元行为,基元行为分为横向的和纵向的。简单来说顶层行为指的是大一些的行为,比如说超车,实现超车这个行为需要很多小的步骤,按照科三的要求要看后视镜、打灯三秒、变道加速再变回来,而这些具体的、细化的步骤就是基元行为。
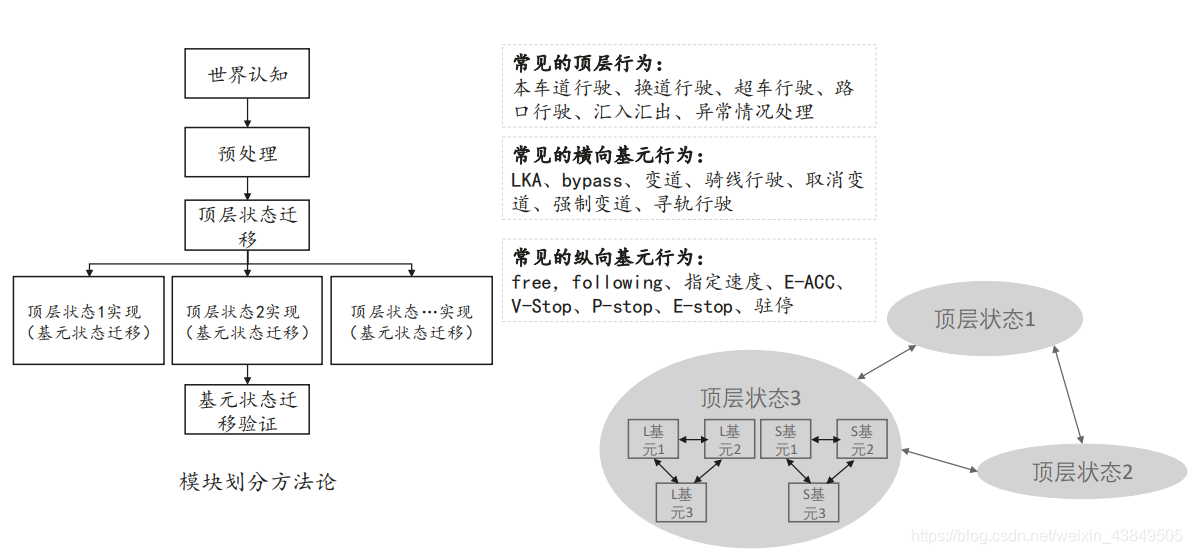
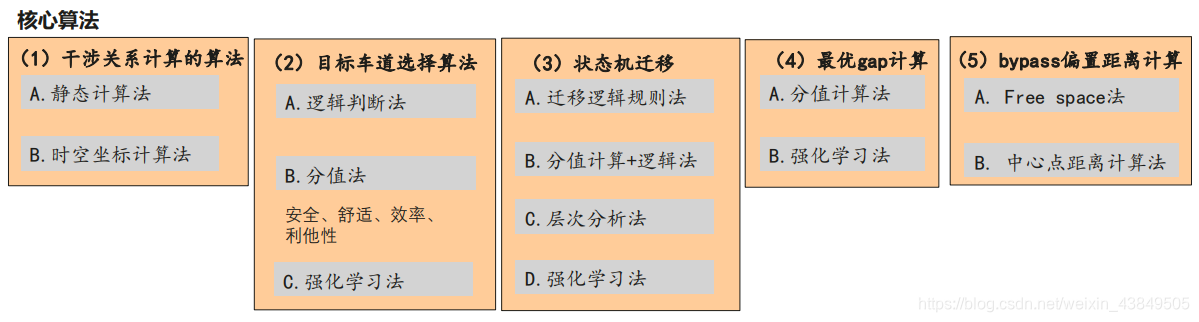
行为决策有很多的可选的方法,核心算法主要是下面几种:
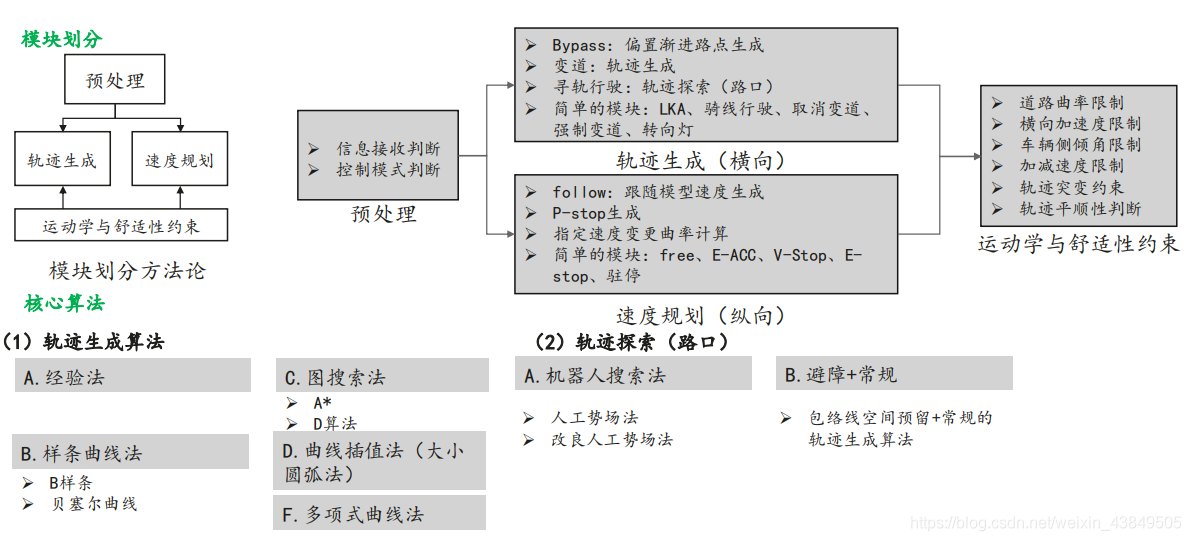
而MOP指的是轨迹规划,即根据不同的行为,确定路点的序列。展开来说预处理之后,根据横向和纵向区分为轨迹生成和速度规划,其实从这里就更好理解所谓的横向和纵向,按照汽车行驶方向建立坐标系,向着行驶方向前进为纵向,垂直行驶方向为横向,沿着行驶方向上可以进行的行为不就是加减速、刹车(特斯拉出来挨打)、跟车等操作,而垂直行驶方向上能采取的动作就是变道等操作了。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











