




一、SSD算法的介绍
1、SSD算法:
是One-stage目标检测算法中的一种,不需要region proposal阶段,可以直接产生物体的类别概率和位置坐标值,经过单次检测即可直接得到最终的检测结果,具有检测速度快的特点。
2、SSD算法结构:
① 主干网络:是由VGG16中部分卷积层组成,并将最后2层的conv6和conv7换成全连接层,用来进行图像分类
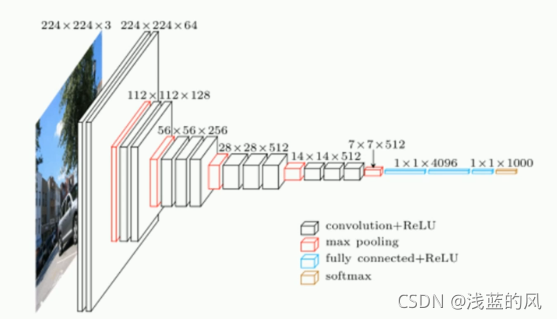
② SSD的检测框架由2个部分组成,一部分是前面的卷积神经网络,经典模型中采用的是VGG16,用于对图像特征的初步提取,第二部分是位于后端的多尺度特征检测网络,用于对前端网络产生的特征层进行不同尺度条件下的特征提取,利用多尺度特征检测网络当中的浅层特征图尺寸较大的特点,尺寸较小的物体。SSD针对Conv4_3、FC7、Conv8_2、Conv9_2、Conv10_2和Conv11_2特征层的每个单元按照不同长宽比分别提取4~6个默认框
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 1115
1115

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











