







理解
建立空间索引在点云数据处理中已被广泛应用,常见空间索引一般是自顶向下逐级划分空间的各种空间索引结构,比较有代表性的包括 BSP 树、KD 树、KDB 树、 R树、R+树、CELL 树、四叉树和八叉树等索引结构,而在这些结构中 KD 树和八叉树在 3D点云数据排列中应用较为广泛。 PCL 对八叉树的数据结构建立和索引方法进行了实现,以方便在此基础上对点云进行处理操作 。
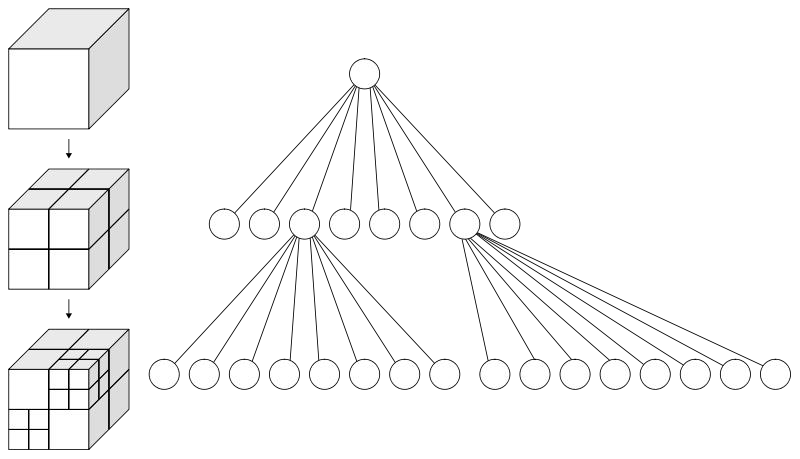
八叉树(Octree)的定义是:若不为空树的话,树中任一节点的子节点恰好只会有八个,或零个,也就是子节点不会有0与8以外的数目。那么,这要用来做什么?想象一个立方体,我们最少可以切成多少个相同等分的小立方体?答案就是8个。再想象我们有一个房间,房间里某个角落藏着一枚金币,我们想很快的把金币找出来,聪明的你会怎么做?我们可以把房间当成一个立方体,先切成八个小立方体,然后排除掉没有放任何东西的小立方体,再把有可能藏金币的小立方体继续切八等份….如此下去,平均在log8(n)
(n表示房间内的所有物体数)的时间内就可找到金币。因此,八叉树就是用在3D空间中的场景管理,可以很快地知道物体在3D场景中的位置,或侦测与其它物体是否有碰撞以及是否在可视范围内。
-这里引入了一个概念:Voxel翻译为体积元素,简称体素。描述了一个预设的最小单位的正方体
pcl的octree库提供了从点云数据创建具有层次的数据结构的方法。这样就可以对点数据集进行空间分区,下采样和搜索操作。每个八叉树节点有八个子节点或没有子节点。根节点描述了一个包围所有点的3维包容盒子。
pcl_octree实现提供了有效的最近邻居搜索(邻域搜索)API,例如“ 体素(Voxel)邻居搜索”,“ K最近邻居搜索”和“半径搜索邻居”。叶子节点类也提供其他功能,例如空间“占用率”和“每个体素(Voxel)的点密度”检查;序列化和反序列化功能可将八叉树结构有效地编码为二进制格式;此外,内存池实现减少了昂贵的内存分配和释放操作,以便快速创建八叉树。

方式一:“体素近邻搜索”
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <iostream>
#include <vector>
#include <ctime>
#include <pcl/octree/octree_search.h>
main (int argc, char **argv)
{
ros::init (argc, argv, "pcl_create");
ros::NodeHandle nh;
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2> ("pcl_output", 1);
// 用系统时间初始化随机种子
srand(time(NULL));
//pcl::PointCloud<pcl::PointXYZ> cloud2;
//pcl::PointCloud<pcl::PointXYZRGBA> cloud;
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);
//pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
sensor_msgs::PointCloud2 output;
int point_num;
float table[8]={-2,-1.5,-1,-0.5,0.5,1,1.5,2};
cloud->width = 512;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for(int a=0;a<8;++a){
float width = table[a];
for(int i=0;i<8;++i){
float length = table[i];
for(int c=0;c<8;++c){
point_num = a*64+i*8+c;
cloud->points[point_num].x = width;
cloud->points[point_num].y = length;
cloud->points[point_num].z = table[c];
//std::cout <<"x="<< cloud->points[point_num].x <<" y="<< cloud->points[point_num].y <<" z="<< cloud->points[point_num].z << std::endl;
if(width==-0.5 && length==-0.5 && table[c]==-0.5){
cloud->points[point_num].r=0;
cloud->points[point_num].g=255;
cloud->points[point_num].b=255;
}else{
cloud->points[point_num].r=0;
cloud->points[point_num].g=0;
cloud->points[point_num].b=255;
}
}
}
}
// 设置分辨率为2
float resolution = 3.0f;
// resolution该参数描述了octree叶子leaf节点的最小体素尺寸。
pcl::octree::OctreePointCloudSearch<pcl::PointXYZRGBA> octree(resolution);
// 设置输入点云
octree.setInputCloud(cloud);
// 通过点云构建octree
octree.addPointsFromInputCloud();
pcl::PointXYZRGBA searchPoint;
searchPoint.x = -0.5;
searchPoint.y = -0.5;
searchPoint.z = -0.5;
// Neighbors within voxel search
// 方式一:“体素近邻搜索”,它把查询点所在的体素中其他点的索引作为查询结果返回,
// 结果以点索引向量的形式保存,因此搜索点和搜索结果之间的距离取决于八叉树的分辨率参数
std::vector<int> pointIdxVec;
//通过searchPoint确定其所在的体素,返回体素中所有的点的索引保存在pointIdxVec中
if (octree.voxelSearch(searchPoint, pointIdxVec)) {
std::cout << "Neighbors within voxel search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z << ")"
<< std::endl;
for (size_t i = 0; i < pointIdxVec.size(); ++i){
if(cloud->points[pointIdxVec[i]].x==-0.5 && cloud->points[pointIdxVec[i]].y==-0.5 && cloud->points[pointIdxVec[i]].z==-0.5){
cloud->points[pointIdxVec[i]].r=0;
cloud->points[pointIdxVec[i]].g=255;
cloud->points[pointIdxVec[i]].b=0;
}else{
cloud->points[pointIdxVec[i]].r=255;
cloud->points[pointIdxVec[i]].g=0;
cloud->points[pointIdxVec[i]].b=0;
}
std::cout << " " << cloud->points[pointIdxVec[i]].x
<< " " << cloud->points[pointIdxVec[i]].y
<< " " << cloud->points[pointIdxVec[i]].z << std::endl;
}
}
pcl::toROSMsg(*cloud, output);
output.header.frame_id = "odom";
ros::Rate loop_rate(1);
while (ros::ok()) {
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}

方式二:K 近邻搜索
// 方式二:K 近邻搜索,本例中K被设置成10, "K 近邻搜索”方法把搜索结果写到两个分开的向量中,
// 第一个pointIdxNKNSearch 包含搜索结果〈结果点的索引的向量〉
// 第二个pointNKNSquaredDistance 保存相应的搜索点和近邻之间的距离平方。
int K = 20;
std::vector<int> pointIdxNKNSearch;
std::vector<float> pointNKNSquaredDistance;
std::cout << "K nearest neighbor search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with K=" << K << std::endl;
//searchPoint为搜索的点云对象、K为搜索返回的近邻个数、pointIdxNKNSearch返回近邻索引向量、pointNKNSquaredDistance 存储近邻点对应的距离平方向量
if (octree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0) {
for (size_t i = 0; i < pointIdxNKNSearch.size(); ++i){
if(cloud->points[pointIdxNKNSearch[i]].x==-0.5 && cloud->points[pointIdxNKNSearch[i]].y==-0.5 && cloud->points[pointIdxNKNSearch[i]].z==-0.5){
cloud->points[pointIdxNKNSearch[i]].r=0;
cloud->points[pointIdxNKNSearch[i]].g=255;
cloud->points[pointIdxNKNSearch[i]].b=0;
}else{
cloud->points[pointIdxNKNSearch[i]].r=255;
cloud->points[pointIdxNKNSearch[i]].g=0;
cloud->points[pointIdxNKNSearch[i]].b=0;
}
std::cout << " " << cloud->points[pointIdxNKNSearch[i]].x
<< " " << cloud->points[pointIdxNKNSearch[i]].y
<< " " << cloud->points[pointIdxNKNSearch[i]].z
<< " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
}
}
K nearest neighbor search at (-0.5 -0.5 -0.5) with K=20
-0.5 -0.5 -0.5 (squared distance: 0)
-0.5 -0.5 -1 (squared distance: 0.25)
-0.5 -1 -0.5 (squared distance: 0.25)
-1 -0.5 -0.5 (squared distance: 0.25)
-1 -1 -0.5 (squared distance: 0.5)
-0.5 -1 -1 (squared distance: 0.5)
-1 -0.5 -1 (squared distance: 0.5)
-1 -1 -1 (squared distance: 0.75)
-0.5 -0.5 0.5 (squared distance: 1)
-0.5 0.5 -0.5 (squared distance: 1)
0.5 -0.5 -0.5 (squared distance: 1)
-1.5 -0.5 -0.5 (squared distance: 1)
-0.5 -0.5 -1.5 (squared distance: 1)
-0.5 -1.5 -0.5 (squared distance: 1)
-1 -0.5 -1.5 (squared distance: 1.25)
-1.5 -1 -0.5 (squared distance: 1.25)
0.5 -1 -0.5 (squared distance: 1.25)
0.5 -0.5 -1 (squared distance: 1.25)
-0.5 -1 0.5 (squared distance: 1.25)
-1 -1.5 -0.5 (squared distance: 1.25)

方式三:半径内近邻搜索
// 方式三:半径内近邻搜索
// “半径内近邻搜索”原理和“K 近邻搜索”类似,它的搜索结果被写入两个分开的向量中,
// 这两个向量分别存储结果点的索引和对应的距离平方
std::vector<int> pointIdxRadiusSearch;
std::vector<float> pointRadiusSquaredDistance;
float radius = 1;
std::cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << std::endl;
//searchPoint要搜索的点、radius半径、pointIdxRadiusSearch结果索引、pointRadiusSquaredDistance距离平方
if (octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0) {
for (size_t i = 0; i < pointIdxRadiusSearch.size(); ++i){
if(cloud->points[pointIdxRadiusSearch[i]].x==-0.5 && cloud->points[pointIdxRadiusSearch[i]].y==-0.5 && cloud->points[pointIdxRadiusSearch[i]].z==-0.5){
cloud->points[pointIdxRadiusSearch[i]].r=0;
cloud->points[pointIdxRadiusSearch[i]].g=255;
cloud->points[pointIdxRadiusSearch[i]].b=0;
}else{
cloud->points[pointIdxRadiusSearch[i]].r=255;
cloud->points[pointIdxRadiusSearch[i]].g=0;
cloud->points[pointIdxRadiusSearch[i]].b=0;
}
std::cout << " " << cloud->points[pointIdxRadiusSearch[i]].x
<< " " << cloud->points[pointIdxRadiusSearch[i]].y
<< " " << cloud->points[pointIdxRadiusSearch[i]].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
}
}
Neighbors within radius search at (-0.5 -0.5 -0.5) with radius=1
-1.5 -0.5 -0.5 (squared distance: 1)
-1 -1 -1 (squared distance: 0.75)
-1 -1 -0.5 (squared distance: 0.5)
-1 -0.5 -1 (squared distance: 0.5)
-1 -0.5 -0.5 (squared distance: 0.25)
-0.5 -1.5 -0.5 (squared distance: 1)
-0.5 -1 -1 (squared distance: 0.5)
-0.5 -1 -0.5 (squared distance: 0.25)
-0.5 -0.5 -1.5 (squared distance: 1)
-0.5 -0.5 -1 (squared distance: 0.25)
-0.5 -0.5 -0.5 (squared distance: 0)
-0.5 -0.5 0.5 (squared distance: 1)
-0.5 0.5 -0.5 (squared distance: 1)
0.5 -0.5 -0.5 (squared distance: 1)
















 1886
1886











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









