







通用定时器TIM2 pwm的输出
1、tim2 为通用定时器,使用其通道3 产生一个pwm波形。
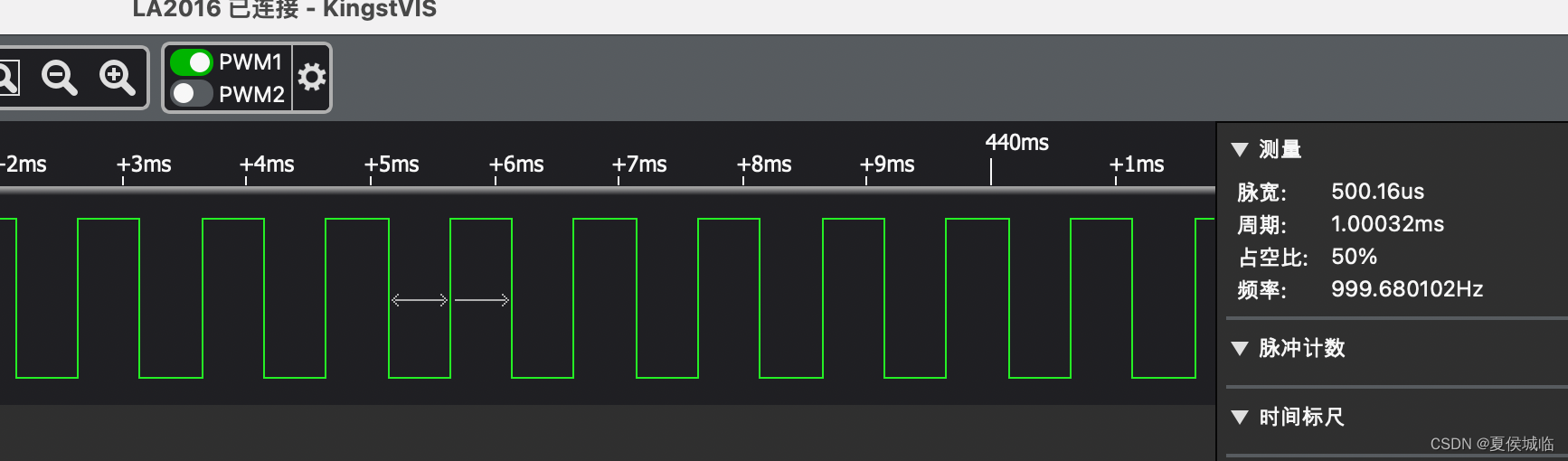
占空比50%,频率1KHZ。
通道3 对应的管脚为PA2.
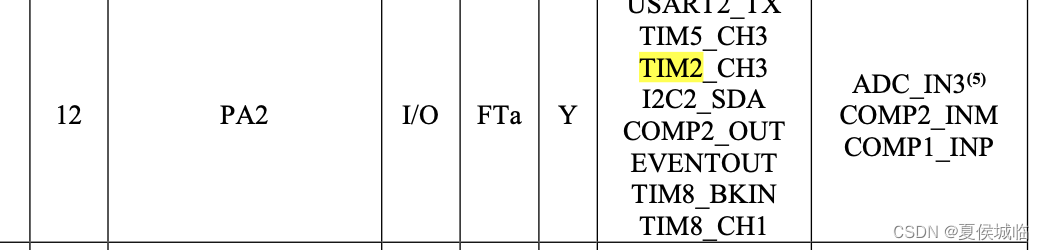
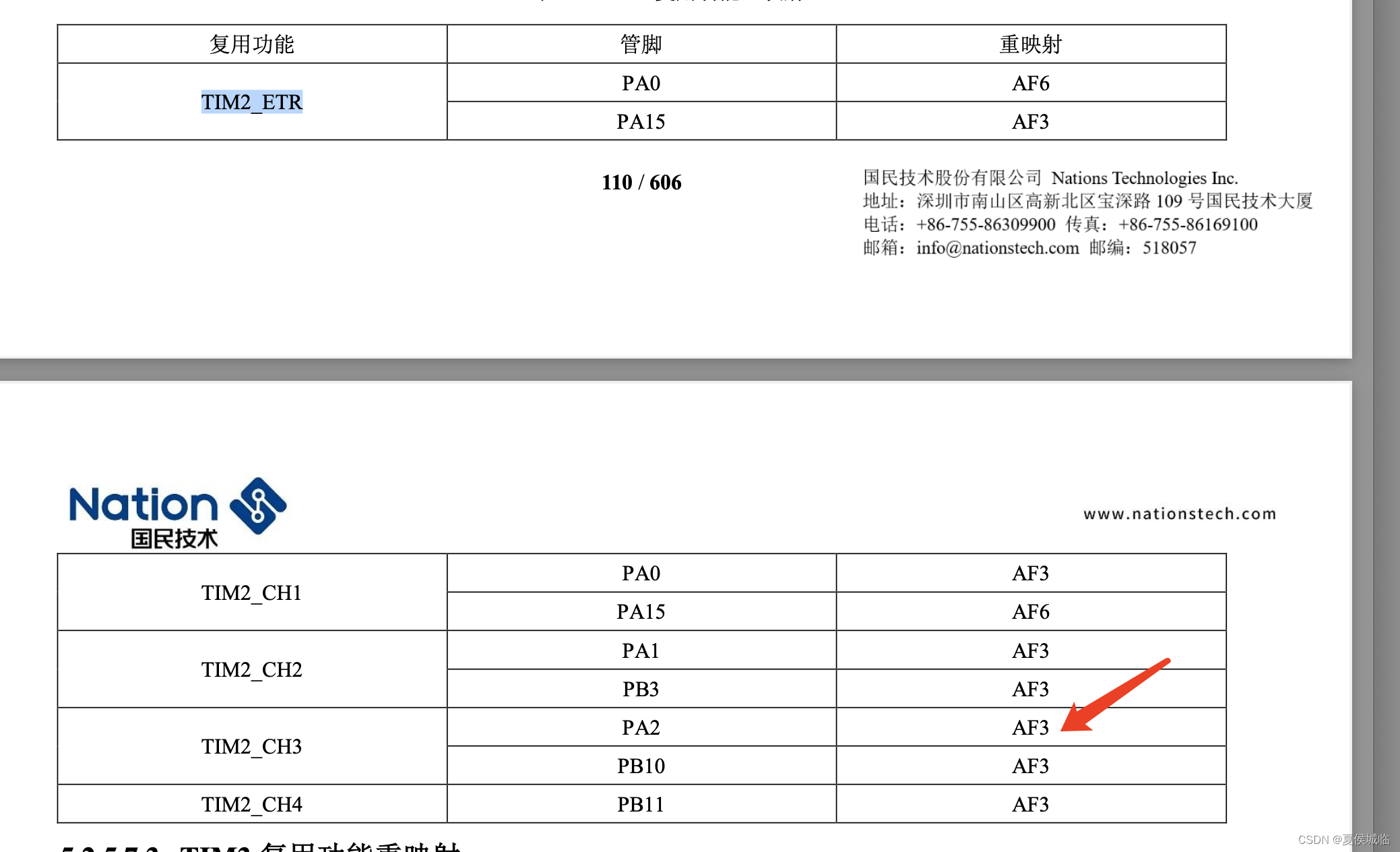
管脚复用重映射
2、代码初始化
新增pwm.c pwm.h文件
pwm.c
#include "main.h"
#include "pwm.h"
#include "type.h"
static void time2_base_init(void)
{
TIM_TimeBaseInitType TIM_TimeBaseStructure;
TIM_Base_Struct_Initialize(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.Period = 1000-1;
TIM_TimeBaseStructure.Prescaler = 64-1;
TIM_TimeBaseStructure.ClkDiv = 0;
TIM_TimeBaseStructure.CntMode = TIM_CNT_MODE_UP;
TIM_Base_Initialize(TIM2, &TIM_TimeBaseStructure);
}
static void time2_pwm_config(void)
{
OCInitType TIM_OCInitStructure;
TIM_Output_Channel_Struct_Initialize(&TIM_OCInitStructure);
/* Channel 1, 2 and 3 Configuration in PWM mode */
TIM_OCInitStructure.OcMode = TIM_OCMODE_PWM2;
TIM_OCInitStructure.OutputState = TIM_OUTPUT_STATE_ENABLE;
TIM_OCInitStructure.OutputNState = TIM_OUTPUT_NSTATE_ENABLE;
TIM_OCInitStructure.Pulse = 500;
TIM_OCInitStructure.OcPolarity = TIM_OC_POLARITY_LOW;
TIM_OCInitStructure.OcNPolarity = TIM_OCN_POLARITY_LOW;
TIM_OCInitStructure.OcIdleState = TIM_OC_IDLE_STATE_SET;
TIM_OCInitStructure.OcNIdleState = TIM_OCN_IDLE_STATE_RESET;
TIM_Output_Channel3_Initialize(TIM2, &TIM_OCInitStructure);
// TIM_OCInitStructure.Pulse = 250;
// TIM_Output_Channel2_Initialize(TIM2, &TIM_OCInitStructure);
}
static void time2_pwm_gpio_init(void)
{
GPIO_InitType GPIO_InitStructure;
GPIO_Structure_Initialize(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_AF_PP;
GPIO_InitStructure.GPIO_Current = GPIO_DS_4MA;
/* TIM2 CH3 PA2 pins init */
GPIO_InitStructure.Pin = GPIO_PIN_2;
GPIO_InitStructure.GPIO_Alternate = GPIO_AF3_TIM2;
GPIO_Peripheral_Initialize(GPIOA, &GPIO_InitStructure);
/* TIM2 CH3 PA1 pins init */
// GPIO_InitStructure.Pin = GPIO_PIN_1;
// GPIO_InitStructure.GPIO_Alternate = GPIO_AF3_TIM2;
// GPIO_Peripheral_Initialize(GPIOA, &GPIO_InitStructure);
}
static MI_BOOL time2_pwm_rcc_init(void)
{
uint32_t ADTIM_clock;
RCC_ClocksType RCC_Clocks;
RCC_AHB_Peripheral_Clock_Enable(RCC_AHB_PERIPH_GPIOA);
RCC_APB2_Peripheral_Clock_Enable(RCC_APB2_PERIPH_AFIO);
//APB 高速(APB2)预分频器
//由软件置位和清零,配置 APB2 时钟(PCLK2)的分频系数。需确保 PCLK2 不 超过 64MHz。
//0xx:HCLK 不分频
//100:HCLK 2 分频
//101:HCLK 4 分频
//110:HCLK 8 分频
//111:HCLK 16 分频
//RCC_Pclk1_Config(RCC_HCLK_DIV4);
RCC_APB1_Peripheral_Clock_Enable(RCC_APB1_PERIPH_TIM2);
return MI_TRUE;
}
static void tim2_interrupt_init(void)
{
NVIC_InitType NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Initializes(&NVIC_InitStructure);
TIM_Interrupt_Enable(TIM2, TIM_INT_UPDATE);
}
void tim2_pwm_init(void)
{
time2_pwm_rcc_init();
time2_pwm_gpio_init();
time2_pwm_config();
tim2_interrupt_init();
time2_base_init();
TIM_On(TIM2);
}
pwm.h
#ifndef __PWM_H__
#define __PWM_H__
void tim2_pwm_init(void);
#endif
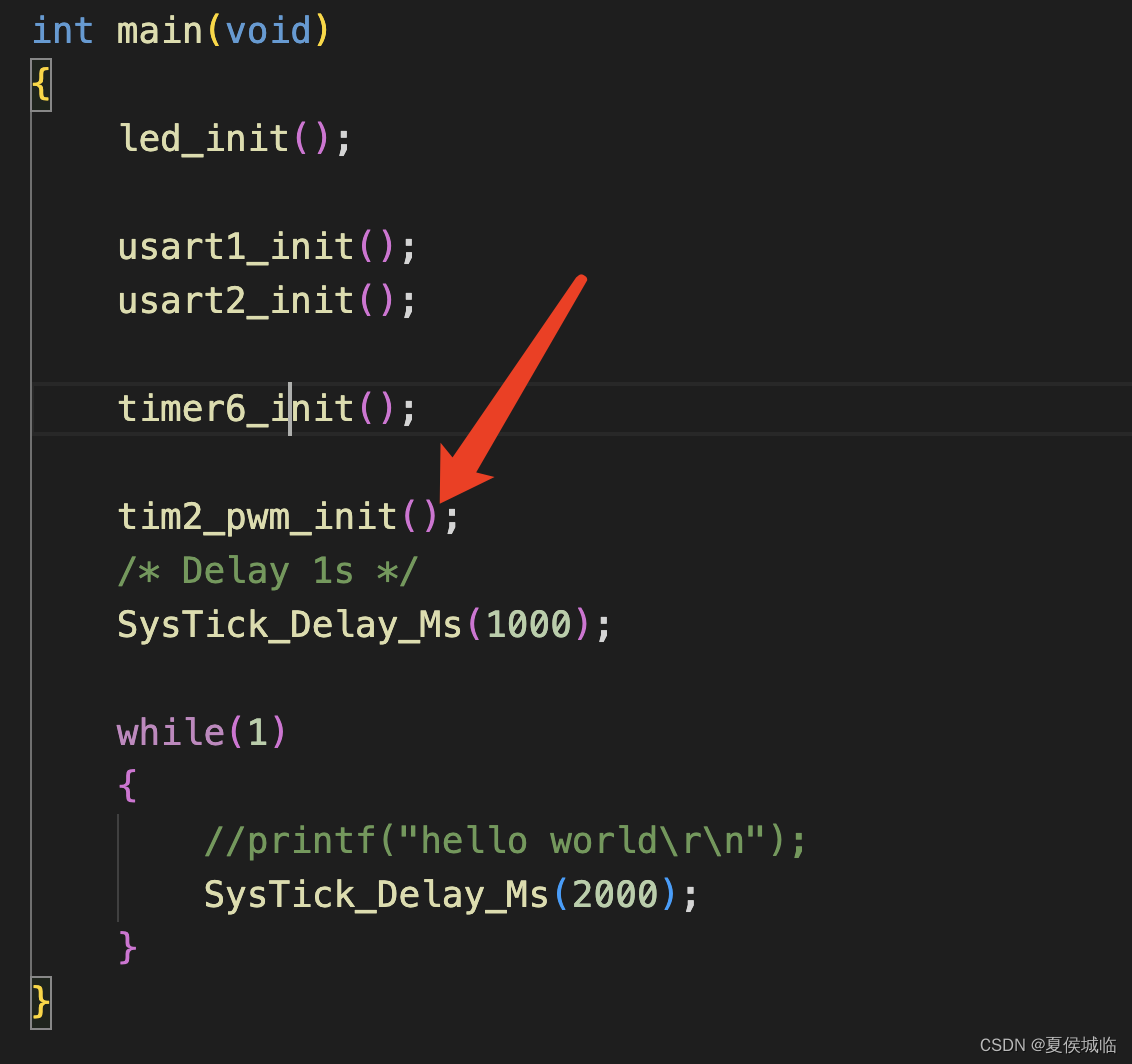
main.c调用
3、产生的波形如图:


















 858
858

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









