







 本教程由臭皮匠机器人原创,旨在帮助用户仅用三步,花费10分钟即可启动并操作RPLidar A1、A2、A3雷达。教程详细介绍了组装雷达、下载及安装所需软件,以及如何运行测试程序进行雷达扫描。
本教程由臭皮匠机器人原创,旨在帮助用户仅用三步,花费10分钟即可启动并操作RPLidar A1、A2、A3雷达。教程详细介绍了组装雷达、下载及安装所需软件,以及如何运行测试程序进行雷达扫描。
本教程由 臭皮匠机器人 原创。
转载请注明出处。
收到一个RPLidar后,干的第一件事应该是先让雷达跑起来,边做边学是最高效的。
本教程,将教你只用简单的三步,花10分钟即可上手。
本教程RPLidar A1,A2,A3三种型号通用。
第1步,组装
拿到雷达后,至少会包括一个雷达和一个转接板,A2套装里自带USB线的。

A3跟A2的附件基本是一样的。A1套装是没有USB线的,需要自备。

自备的话,记住USB线接口是Micro-B的,这个样子:

把雷达和转接板接起来,转接板和USB线接起来,先不要将USB口插到电脑上。


注意,A3雷达需要将转接板上的小开关拨到256000一档,如图。

第2步,下软件
RPLidar的数据是用串口通信的。
转接板其实就是一个USB转串口的板子,外加了电机调速功能,可以控制雷达转速。
首先需要安装转接板的驱动,然后运行雷达测试程序。
比较方便的做法是,直接去官网下载RPLidar的SDK(A1,A2,A3通用的),里面包含了两个需要的软件,(不要用git下载,而是直接下载页面上的链接)。
SDK下载地址 https://www.slamtec.com/cn/Support#rplidar-a2
解压SDK包,在tools/cp2012_driver里找到转换板的windows驱动
在tools/win32下找到frame_grabber.exe。(用git下载的会没有这个软件)

第3步,运行
转换板驱动安装好后,先打开设备管理器查看现有的串口情况
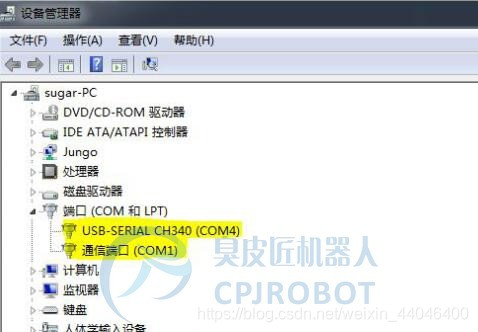
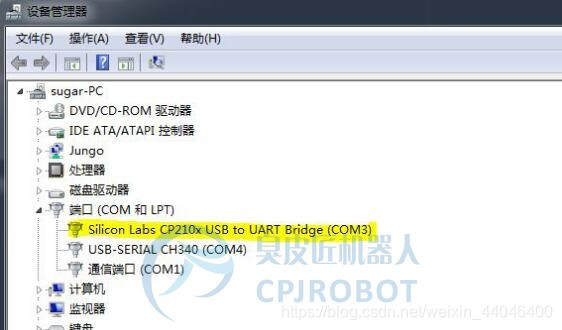
然后将雷达接入电脑USB口上,雷达的通讯接口会被识别为一个串口,观察新增的串口号
运行frame_grabber.exe,跳出如下界面。
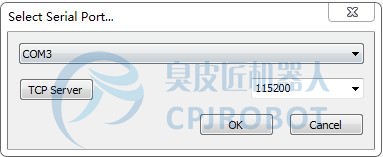
选择刚才对应的串口号,波特率的话A1和A2都选择115200,A3的话选择256000。
ok后进入主画面。点击左上角绿色的小图标即可开始扫描了。顺利的话会看到雷达开始旋转,同时屏幕上出现扫描的结果。
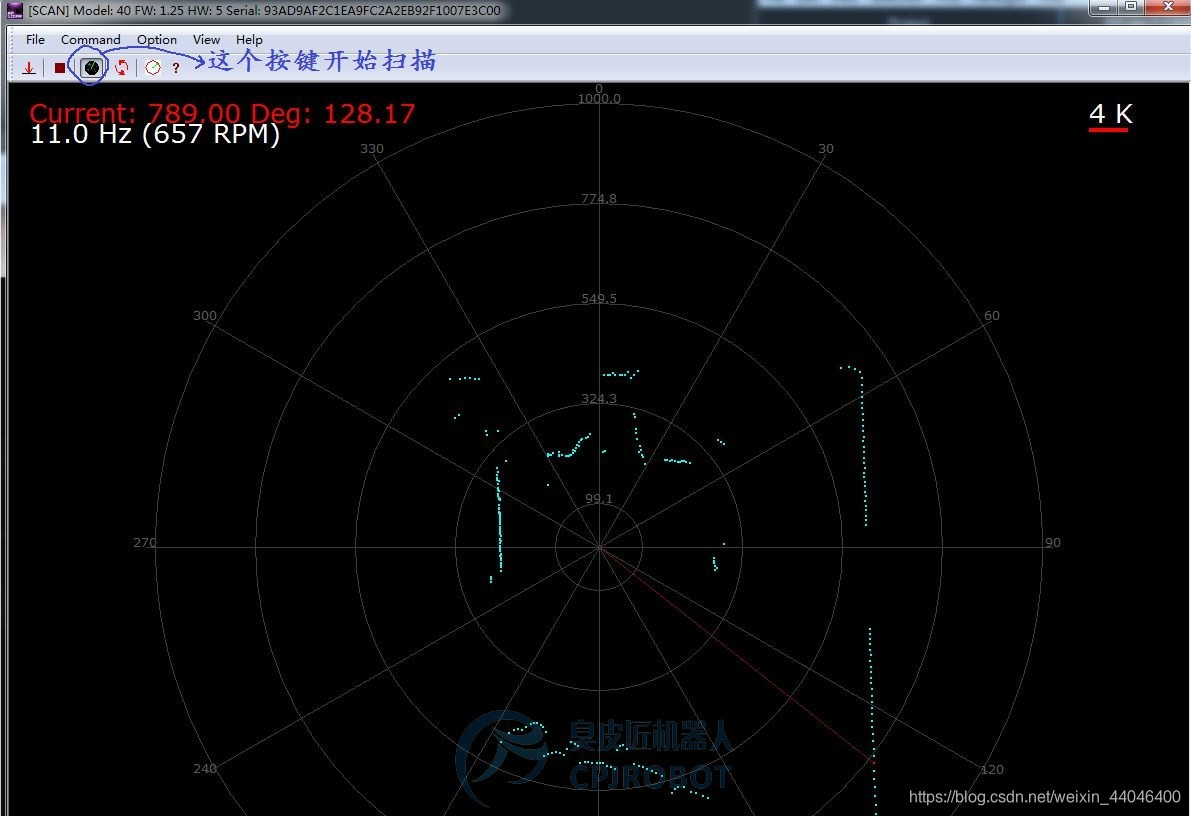
在画面中间,可以用鼠标滚轮放大缩小看到的扫描结果。
到这里雷达就正常运转起来啦。
解释
左上角的Current 显示的是实时测距的某个点(很细的那个红色线指的点)的距离, Deg即该点对应的角度。
底下的11Hz(657RPM)是当前的转速,目前代表一秒钟转11圈,或者每分钟转657圈。转速检测没有那么准确,不必太在意,大概就是一秒钟10圈左右的意思。
右上角的4K是表示当前每秒扫描的点数,一般A2默认是4K,A3可能是8K或更高。低于2K的旧版的雷达可能没有显示。
画面中间圆形背景的刻度,最外面是显示了角度。中间竖线标示了距离,单位是mm。
雷达摆放位置跟角度的对应关系如下图,记住雷达连接线出来的地方是180度,角度顺时针增加的。


现在画面中显示的结果实际上,是我把雷达放在家里电脑桌上。右边是墙壁,下面是我上面一片是桌上摆的各种杂物…
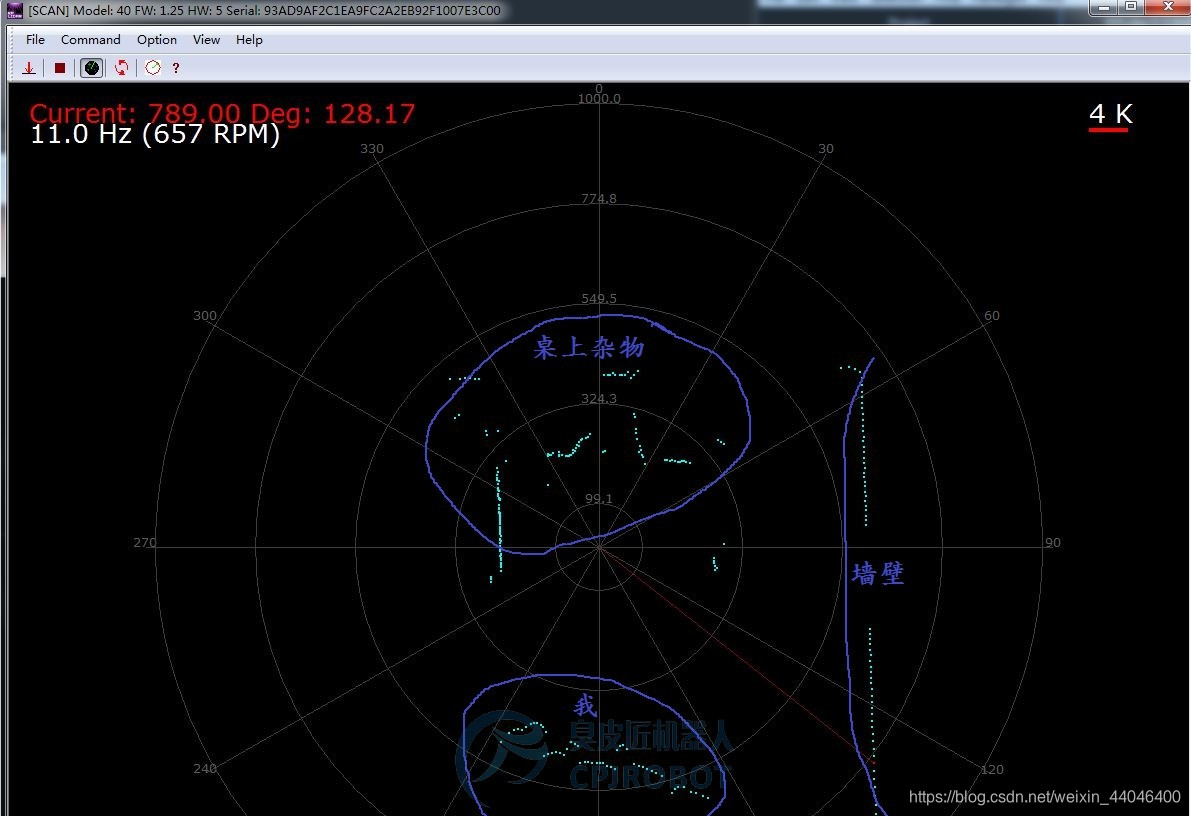
本教程到此结束啦。臭皮匠机器人将出品更多针对RPLIDAR的教程给您,关注我们哦!

















 8950
8950

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









