







 博客介绍目标定位算法,它能逼近目标真实位置、降低定位误差。着重阐述非测距定位算法,如质心定位等,其定位偏差与观测站部署密度有关。还给出质心定位算法的计算方法,并通过MATLAB实现一个实例,展示定位误差与观测站位置及疏密程度的关系。
博客介绍目标定位算法,它能逼近目标真实位置、降低定位误差。着重阐述非测距定位算法,如质心定位等,其定位偏差与观测站部署密度有关。还给出质心定位算法的计算方法,并通过MATLAB实现一个实例,展示定位误差与观测站位置及疏密程度的关系。
质心定位算法原理及其Matlab实现
目标定位算法是获取目标位置的手段之一,利用观测信息、采用最合理的定位算法、结合实际应用领域的特点进行目标定位能达到较好的效果。定位算法不能完全得到与目标真实情况一致的位置信息,但它能最大限度地逼近真实位置,使定位误差降到合理的阈以下。
非测距定位,广泛地指不依赖任何信息,无须测量目标与观测站之间的距离和角度等信息,或者当测量的目标与观测站之间的距离和角度误差非常大的时候,只能用它们作为权值来处理。这类定位算法,只能依靠观测站的物理部署和简单的探测到目标的“有/无”的二进制探测信息对目标位置进行估计。非测距定位算法主要有质心定位算法、加权质心定位算法和网格定位算法等,它们虽然能够估计出具体位置,但是这个位置与目标真实位置的偏差依赖于观测站的部署密度,一般偏差是比较大的。
质心定位算法主要依赖对目标质心的估计,质量中心简称为质心,指物质系统上被认为质量集中于此的一个假想点。三角形中三条中线的交点、平行四边形的对角线、正六边形的对角线交点,这些点都可以看做这些几何图形的质心。
那么对于多质点的系统,假定每个质点的重量为
m
i
m_i
mi,位置为
p
(
x
i
,
y
i
,
z
i
)
p(x_i,y_i,z_i)
p(xi,yi,zi),那么该系统的质心计算方法如下:
{
x
c
=
∑
m
i
x
i
m
i
y
c
=
∑
m
i
y
i
m
i
z
c
=
∑
m
i
z
i
m
i
\left\{ \begin{array}{rcl} x_c =\frac{\sum m_ix_i}{m_i} \\ y_c =\frac{\sum m_iy_i}{m_i}\\ z_c =\frac{\sum m_iz_i}{m_i} \end{array}\right.
⎩
⎨
⎧xc=mi∑mixiyc=mi∑miyizc=mi∑mizi
如果考虑各质点的质量一样,那么质心的计算方法则简化为:
{
x
c
=
∑
i
=
1
N
x
i
N
y
c
=
∑
i
=
1
N
y
i
N
z
c
=
∑
i
=
1
N
z
i
N
\left\{ \begin{array}{rcl} x_c =\frac{\sum_{i=1}^N x_i}{N} \\ y_c =\frac{\sum_{i=1}^N y_i}{N} \\ z_c =\frac{\sum_{i=1}^N z_i}{N} \\ \end{array}\right.
⎩
⎨
⎧xc=N∑i=1Nxiyc=N∑i=1Nyizc=N∑i=1Nzi
将质心定理用在定位算法上,那么假定每一个观测站的位置为
p
(
x
i
,
y
i
,
z
i
)
p(x_i,y_i,z_i)
p(xi,yi,zi),将探测到目标的所有观测站看成一个多质点系统,按照上式可以计算得到一个位置,这个位置便是目标位置的估计值。显然,当观测站的分布很稀疏时,这个定位误差会很大。
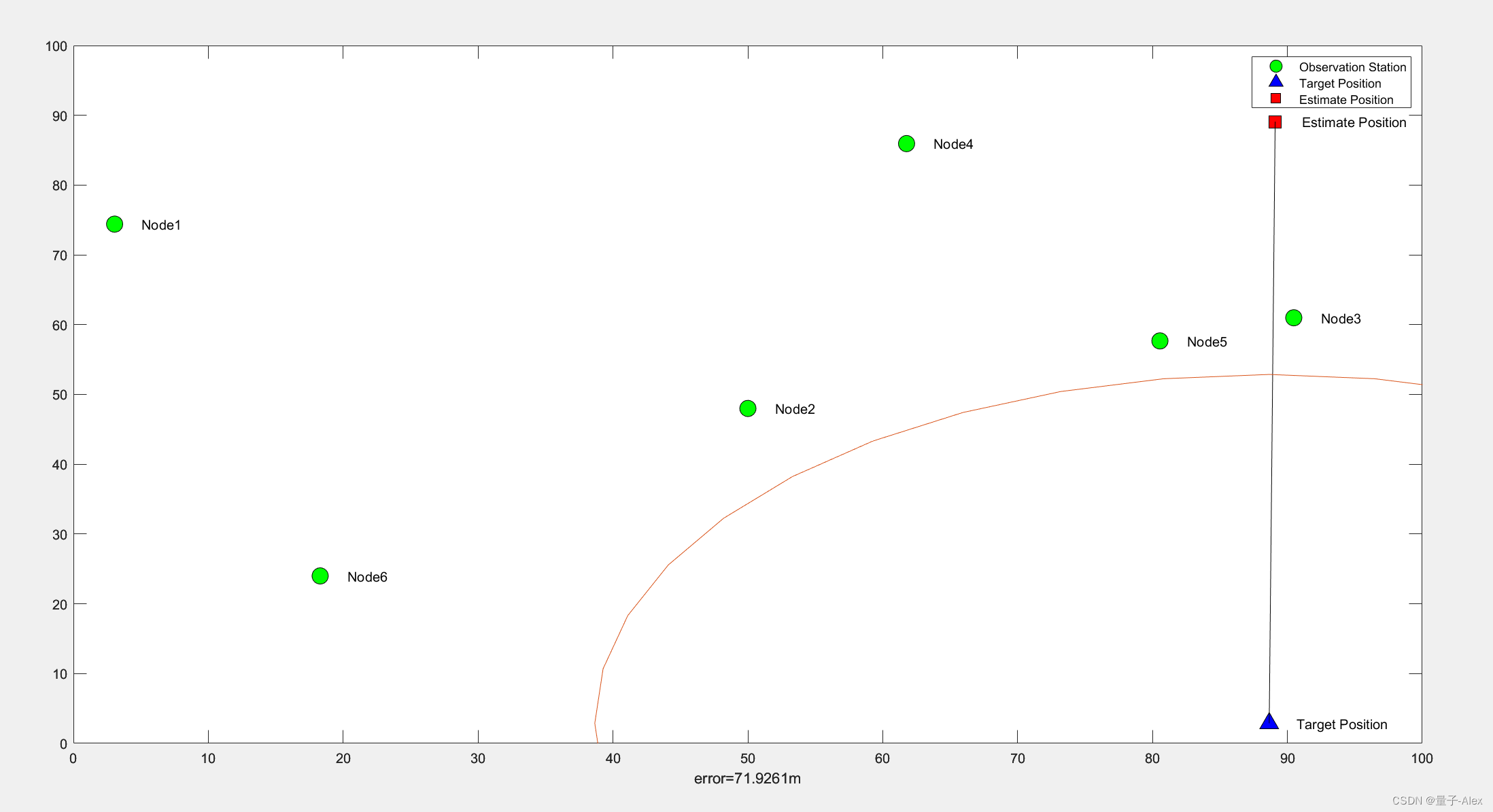
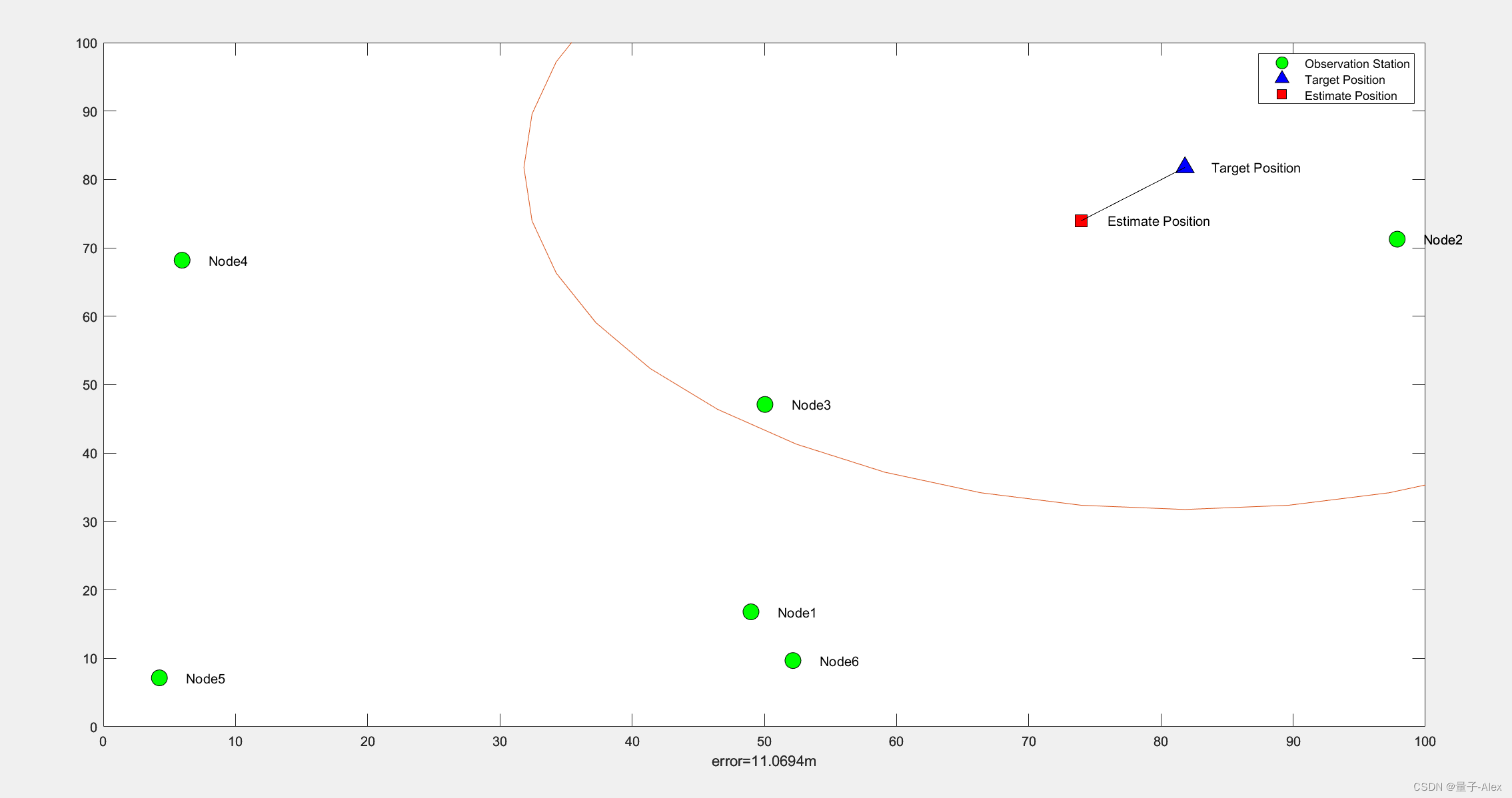
实例1:假定有6个观测站,随机分布在长100米,宽100米的场地上,每个观测站完全相同,它们的探测距离是50m。一个目标随机出现在该监测场地,被其中的几个观测站探测到,并计算估计位置,用MATLAB实现这个过程。
主程序代码如下:
%% %%%%%%%%%%%%% function CentroidLocalization 质心点位算法
% 定位初始化
Length = 100; %场地空间 长
Width =100; %场地空间 宽
d = 50; %单个观测站对目标的探测距离
N = 6; %观测站的个数
% 观测站位置初始化
for i = 1:N
Node(i).x = Length*rand;
Node(i).y = Width*rand;
end
% 目标的位置也进行随机化处理
Target.x = Length*rand;
Target.y = Width*rand;
O =[ ]; %空列表,保存能够探测到目标的观测站的位置集合
for i = 1:N
if getDist(Node(i),Target)<= d %调用距离计算函数
O = [O;Node(i).x,Node(i).y]; %记录探测到目标的观测站的位置
end
end
M = size(O,1); %求数组O的第一个维度的数量,即探测到目标的观测站的个数
if M>0
Est_Target.x = sum(O( :,1))/M; % 调用公式用质心算法估计目标的位置x
Est_Target.y = sum(O( :,1))/M;
Error_Dist = getDist(Est_Target,Target); %计算目标真实位置与估计位置的偏差距离
end
%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure
hold on
box on;
axis([0 100 0 100]); %输出图形的框架
for i =1:N
h1 = plot(Node(i).x,Node(i).y,'ko','MarkerFace','g','MarkerSize',12);
text(Node(i).x+2,Node(i).y,['Node',num2str(i)]); %标记观察站的号码
end
% 画目标的真实位置和估计位置并标注
h2 = plot(Target.x,Target.y,'k^','MarkerFace','b','MarkerSize',12);
text(Target.x+2,Target.y,'Target Position');
h3 = plot(Est_Target.x,Est_Target.y,'ks','MarkerFace','r','MarkerSize',12);
text(Est_Target.x+2,Est_Target.y,'Estimate Position');
% 将估计位置和真实位置用线连起来
line([Target.x,Est_Target.x],[Target.y,Est_Target.y],'Color','k');
% 画出目标半径d的范围
circle(Target.x,Target.y,d);
% 标明h1,h2,h3
legend([h1,h2,h3],'Observation Station','Target Position','Estimate Position');
xlabel(['error=',num2str(Error_Dist),'m']);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
距离计算子程序代码
function dist= getDist(A,B)
%UNTITLED Summary of this function goes here
% Detailed explanation goes here
dist = sqrt((A.x-B.x)^2+(A.y-B.y)^2);
画半径子程序代码
function circle(x0,y0,r)
%UNTITLED 此处显示有关此函数的摘要
% 此处显示详细说明
theta = 0:pi/20:2*pi;
plot(x0+r*cos(theta),y0+r*sin(theta));
下面是两次运行的结果,可以看到特别是第一次定位误差是非常大的,定位误差和观测站的位置及部署的疏密程度关系密切。


















 133
133

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











