










 博客探讨了一致性在多智能体系统中的概念,包括连续时间、离散时间和时变拓扑网络的一致性算法。同时介绍了基于卡尔曼滤波的一致性算法,这种算法允许网络中的传感器节点状态估计值在迭代中趋近一致,且仅依赖局部信息,无需中心节点。
博客探讨了一致性在多智能体系统中的概念,包括连续时间、离散时间和时变拓扑网络的一致性算法。同时介绍了基于卡尔曼滤波的一致性算法,这种算法允许网络中的传感器节点状态估计值在迭代中趋近一致,且仅依赖局部信息,无需中心节点。
一致性
一致性是指在具有多个个体的系统中,各个体状态在某种规则作用下,伴随时间推移而趋于一致。一致性协议就是个体与个体之间的作用规则,表示个体与邻居个体的信息交互过程。
一致性算法
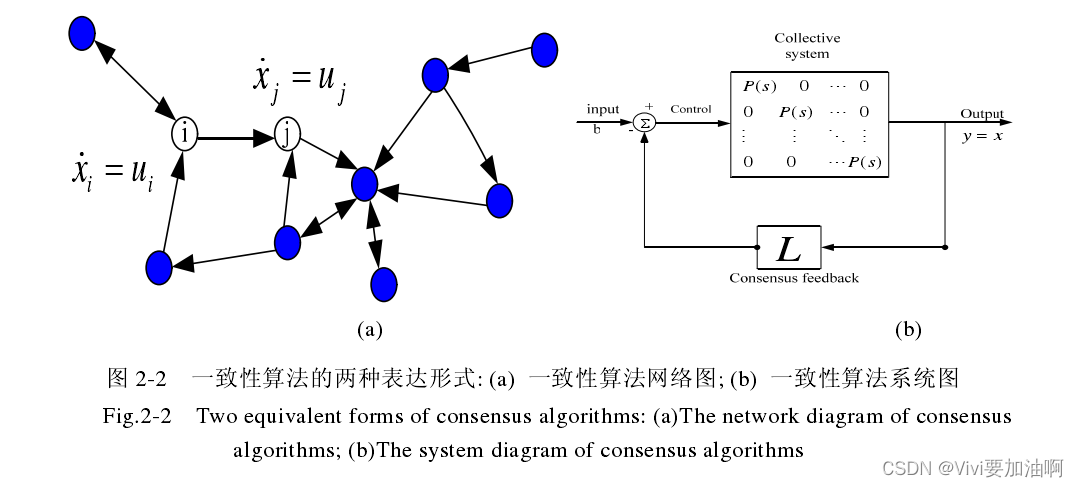
图 2-2 给出了多智能体系统一致性问题的两种不同表达形式。由图(a)和图(b)可知,每个节点为一个积分器,每个系统的传递函数为
P
(
s
)
=
1
/
s
P(s)=1/s
P(s)=1/s,整个系统是个多输入多输出系统,图(a)中
x
i
x_i
xi表示第
i
i
i个节点的状态(例如位置,速度信息等)。由
n
n
n个节点构成的简单网络的一致性算法为:
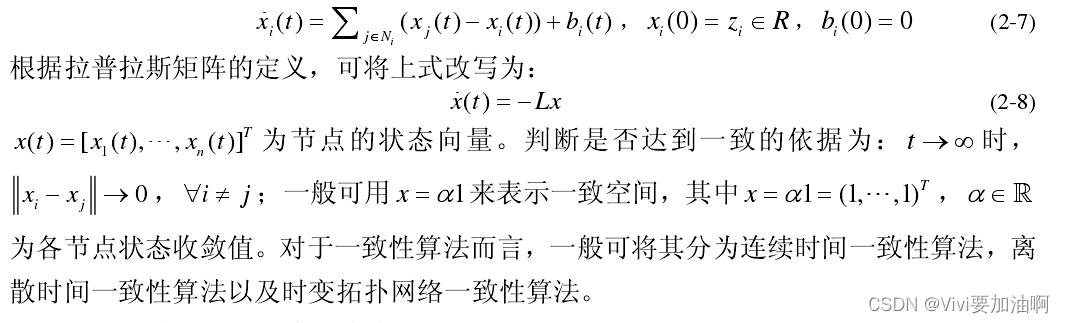
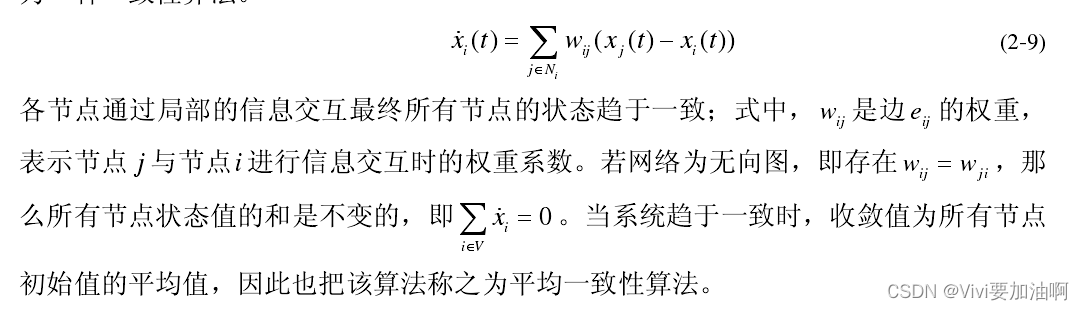
(1)连续时间一致性算法
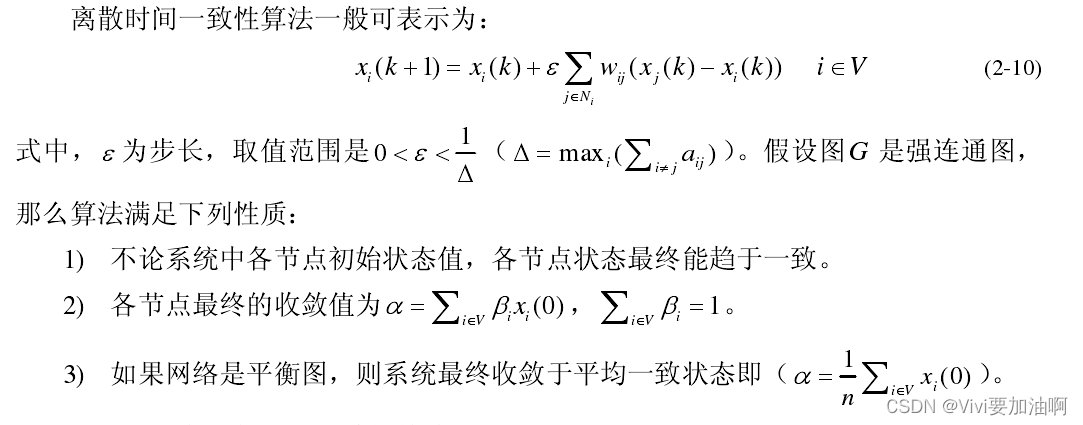
(2)离散时间一致性算法
(3)时变拓扑网络一致性算法

一致性卡尔曼滤波
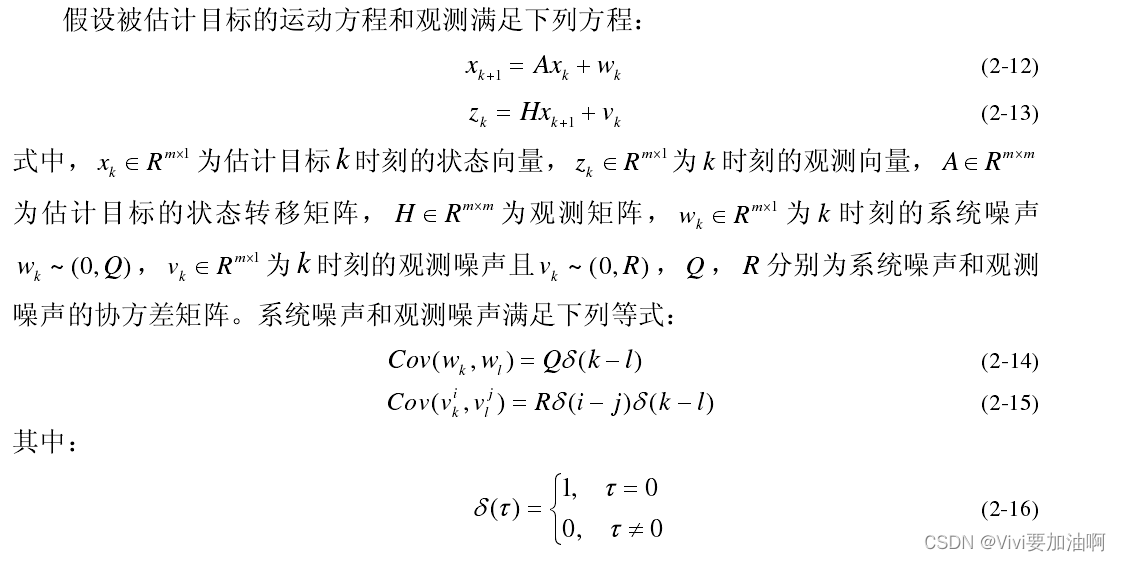
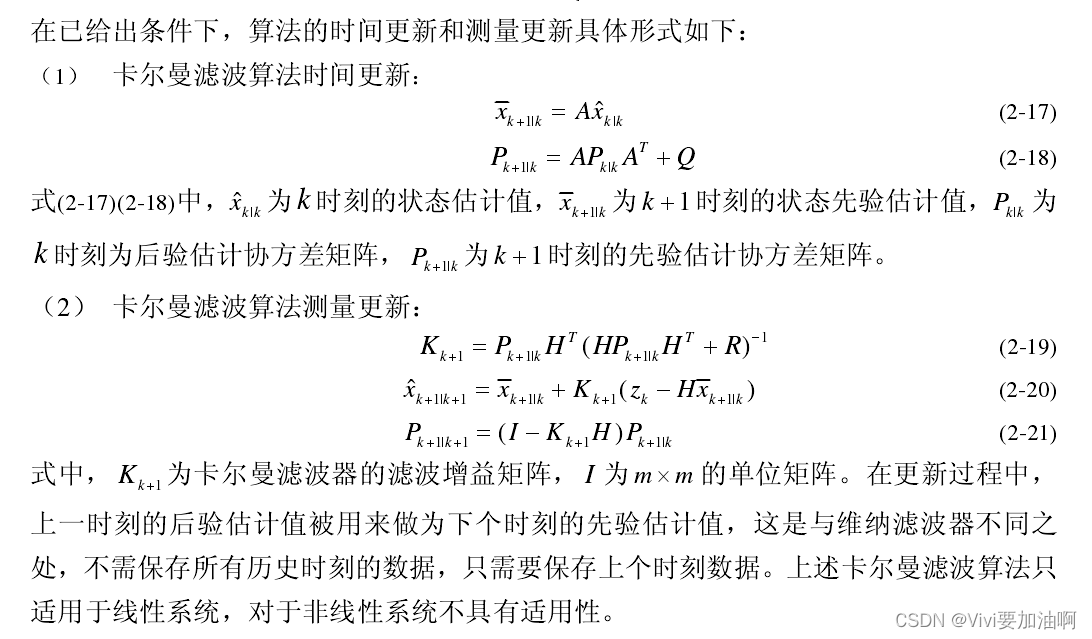
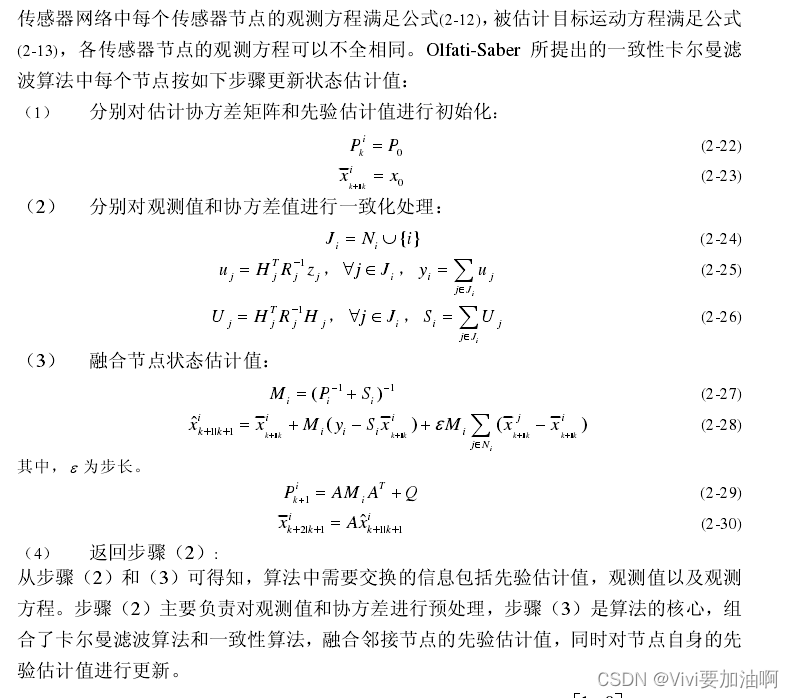
一致性卡尔曼滤波算法(Consensus-based Kalman filtering:CKF)是一种耦合卡尔曼滤波和多智能体一致性的新型分布式估计算法,由于只需使用节点的局部信息,且不需要融合中心,随着迭代次数增加,网络中所有的传感器节点的状态估计值都能趋于一致。

















 239
239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









