










YOLOv3+mAP实现金鱼检测
Git源码地址:传送门
准备数据集
- 按帧数读取视频保存图片 video2frame.py
- 使用labelimg标注工具对图片进行标注
- 统一图片大小为 416x416,并把标签等信息写成
.xml文件 conver_point.py - 读取缩放后的标签图片,转为左上角右下角坐标信息 voc2yolo_v3.py
自定义数据集
分析
- 准备数据集
- 使用标注工具(labelimg)给图片标注标签,转换为YOLO可用的格式
- 标签框信息:类别 + 中心点坐标 + 宽高
- cls, cx, cy, w, h
- 准备锚框
- 自定义锚框,3类检测目标各3种锚框,共9种锚框
- 获取锚框宽高 anchor_w, anchor_h,用于tw, th的制作
- 标签形状更换
- C H W --> H W C
- 如:使用13x13,四分类
- 13, 13, 27 --> (情况1) 13, 13, 3, 9 (情况2) 3, 13, 13, 9
- 填值(one-hot编码)
- tx, ty, tw, th, one-hot
- tx = 坐标x偏移量
- ty = 坐标y偏移量
- tw = torch.log(gt_w / anchor_w)
- th = torch.log(gt_h / anchor_h)
实现结构
- dataset.py
- init
- 读取特征文件,获得目标宽高所有信息
- 特征文件保存信息格式
- 文件名 类别 中心点坐标 宽高
- img_name, cls, cx, cy, gt_w, gt_h
- len
- 返回文件信息的长度
- gititem
- 根据索引读取指定行信息 img_name, cls, cx, cy, gt_w, gt_h
- 切割获得图片名字 img_name、标签框信息 cls, cx, cy, gt_w, gt_h
- 图片转为张量 img_name --> img_tensor
- 通道变换保存标签 H W 27 --> H W 3 9
- 标签框切割计算获取 cx, tx, cy, ty
- gt_w, gt_h和锚框宽高计算 tw th
- 类别cls和类别数创建one-hot编码
- 填值 label[cx, cy, feature_idx] = conf tx ty tw th one_hot
- init
完整代码
dataset.py
import math
import os.path
import cv2
import numpy as np
import torch
from torch.utils.data import Dataset
from config import cfg
from util import util
import torch.nn.functional as F
class ODDateset(Dataset):
def __init__(self):
super().__init__()
with open(cfg.BASE_LABEL_PATH, 'r', encoding='utf-8') as f:
self.lines = f.readlines()
def __len__(self):
return len(self.lines)
def __getitem__(self, index):
"""
:param index: 索引
:return: 三种特征大小标签值、图片张量
1. 根据索引读取指定行信息 img_name, cls, cx, cy, gt_w, gt_h
2. 切割获得图片名字 img_name、标签框信息 cls, cx, cy, gt_w, gt_h
3. 图片转为张量 img_name --> img_tensor
4. 通道变换保存标签 H W 27 --> H W 3 9
5. 标签框切割计算获取 cx, tx, cy, ty
6. gt_w, gt_h和锚框宽高计算 tw th
7. 类别cls和类别数创建one-hot编码
8. 填值 label[cx, cy, feature_idx] = conf tx ty tw th one_hot
"""
infos = self.lines[index].strip().split()
img_name = infos[:1][0]
# '1.jpg'
img_path = os.path.join(cfg.BASE_IMG_PATH, img_name)
img = cv2.imread(img_path)
img_tensor = util.t(img)
box_info = infos[1:]
# ['2', '163', '218', '228', '246', '1', '288', '205', '159', '263']
boxes = np.split(np.array(box_info, dtype=np.float_), len(box_info) // 5)
# 0 = {ndarray: (5,)} [ 2. 163. 218. 228. 246.]
# 1 = {ndarray: (5,)} [ 1. 288. 205. 159. 263.]
label_dic = {}
for feature, anchors in cfg.ANCHORS_GROUP.items():
# H W 3 9
label = torch.zeros((feature, feature, 3, 5 + cfg.CLASS_NUM))
scale_factor = cfg.IMG_ORI_SIZE / feature
# 416 / 13 = 32
for box in boxes:
cls, cx, cy, gt_w, gt_h = box
# [ 2. 163. 218. 228. 246.]
offset_x, cx_idx = math.modf(cx / scale_factor)
# 0 = {float} 0.09375
# 1 = {float} 5.0
offset_y, cy_idx = math.modf(cy / scale_factor)
for idx, anchor in enumerate(anchors):
anchor_w, anchor_h = torch.tensor(anchor)
# torch.log 加速收敛速度
tw = torch.log(gt_w / anchor_w)
th = torch.log(gt_h / anchor_h)
one_hot = F.one_hot(torch.tensor(int(cls), dtype=torch.int64), num_classes=cfg.CLASS_NUM)
# tensor([0, 0, 1, 0])
conf = 1
label[int(cy_idx), int(cx_idx), idx] = torch.tensor([conf, offset_x, offset_y, tw, th, *one_hot])
# h w c
label_dic[feature] = label
f1, f2, f3 = cfg.ANCHORS_GROUP.keys()
# 13 26 52
return label_dic[f1], label_dic[f2], label_dic[f3], img_tensor
if __name__ == '__main__':
dataset = ODDateset()
print(dataset[0])
pass
构建网络模型
网络结构
- 主干网络 backbone
- 卷积层 CBL
- Conv
- BN
- LeakReLu
- 残差单元 ResUnit
- 下采样 DownSample
- 卷积层 CBL
- neck
- 卷积集合 ConvolutionSet
- 卷积层 CBL
- 上采样 UpSample
- 拼接操作 torch.cat
- head
- 卷积层 CBL
- 全卷积预测
- 类别 x 锚框
- ( 1 + 4 + 4 ) x 3

实现结构
- module.py
- 卷积层 CBL
- 残差单元 ResUnit
- 下采样 DownSample
- 上采样 UpSample
- 卷积集合 ConvolutionSet
- data.yaml
- 保存主干网络结构的参数:通道数、残差块数量
- darknet53.py
- 实现主干网络结构,输出out_13x13, out_26x26, out_52x52
- yolov3.py
- 初始化主干网络,实现neck、head网络结构,输出detect_13_out, detect_26_out, detect_52_out
完整代码
module.py
"""
网络结构
- backbone
- 卷积层 CBL
- Conv
- BN
- LeakReLu
- 残差单元 ResUnit
- 下采样 DownSample
- neck
- 卷积集合 ConvolutionSet
- 上采样 UpSample
- 拼接操作 torch.cat
"""
import torch
from torch import nn
class CBL(nn.Module):
# Conv+BN+LeakReLu
def __init__(self, c_in, c_out, k, s):
super().__init__()
self.cnn_layer = nn.Sequential(
nn.Conv2d(c_in, c_out, kernel_size=k, stride=s, padding=k // 2, bias=False),
nn.BatchNorm2d(c_out),
nn.LeakyReLU()
)
def forward(self, x):
return self.cnn_layer(x)
class ResUnit(nn.Module):
# 残差单元
def __init__(self, c_num):
super().__init__()
self.block = nn.Sequential(
CBL(c_num, c_num // 2, 1, 1),
CBL(c_num // 2, c_num, 3, 1)
)
def forward(self, x):
return self.block(x) + x
class DownSample(nn.Module):
# 下采样
def __init__(self, c_in, c_out):
super().__init__()
self.down_sample = nn.Sequential(
CBL(c_in, c_out, 3, 2)
)
def forward(self, x):
return self.down_sample(x)
class ConvolutionSet(nn.Module):
# 卷积集合
def __init__(self, c_in, c_out):
super().__init__()
self.cnn_set = nn.Sequential(
CBL(c_in, c_out, 1, 1),
CBL(c_out, c_in, 3, 1),
CBL(c_in, c_out, 1, 1),
CBL(c_out, c_in, 3, 1),
CBL(c_in, c_out, 1, 1)
)
def forward(self, x):
return self.cnn_set(x)
class UpSample(nn.Module):
# 上采样
def __init__(self):
super().__init__()
self.up_sample = nn.Upsample(scale_factor=2, mode='nearest')
def forward(self, x):
return self.up_sample(x)
if __name__ == '__main__':
# data = torch.randn(1, 3, 416, 416)
# cnn = nn.Sequential(
# CBL(3, 32, 3, 1),
# DownSample(32, 64)
# )
# res = ResUnit(64)
#
# cnn_out = cnn(data)
# res_out = res(cnn_out)
# print(cnn_out.shape)
# # torch.Size([1, 64, 208, 208])
# print(res_out.shape)
# # torch.Size([1, 64, 208, 208])
data = torch.randn(1, 1024, 13, 13)
con_set = ConvolutionSet(1024, 512)
cnn = CBL(512, 256, 1, 1)
up_sample = UpSample()
P0_out = up_sample(cnn(con_set(data)))
print(P0_out.shape)
# torch.Size([1, 256, 26, 26])
pass
data.yaml
block_nums:
- 1
- 2
- 8
- 8
- 4
channels:
- 32
- 64
- 128
- 256
- 512
- 1024
darknet53.py
import torch
import yaml
from torch import nn
from module import CBL, ResUnit, DownSample
class DarkNet53(nn.Module):
def __init__(self):
super().__init__()
self.input_layer = nn.Sequential(
CBL(3, 32, 3, 1)
)
# # 方式1
# self.hidden_layer = nn.Sequential(
# DownSample(32, 64),
# ResUnit(64),
#
# DownSample(64, 128),
# ResUnit(128),
# ResUnit(128),
#
# DownSample(128, 256),
# ResUnit(256),
# ResUnit(256),
# ResUnit(256),
# ResUnit(256),
# ResUnit(256),
# ResUnit(256),
# ResUnit(256),
# ResUnit(256),
#
# DownSample(256, 512),
# ResUnit(512),
# ResUnit(512),
# ResUnit(512),
# ResUnit(512),
# ResUnit(512),
# ResUnit(512),
# ResUnit(512),
# ResUnit(512),
#
# DownSample(512, 1024),
# ResUnit(1024),
# ResUnit(1024),
# ResUnit(1024),
# ResUnit(1024)
# )
# 方式2
layers = []
with open('data.yaml', 'r', encoding='utf-8') as file:
dic = yaml.safe_load(file)
channels = dic['channels']
block_nums = dic['block_nums']
for idx, block_num in enumerate(block_nums):
layers.append(self.make_layer(channels[idx], channels[idx + 1], block_num))
self.hidden_layer = nn.Sequential(*layers)
def make_layer(self, c_in, c_out, block_num):
units = [DownSample(c_in, c_out)]
for _ in range(block_num):
units.append(ResUnit(c_out))
return nn.Sequential(*units)
def forward(self, x):
x = self.input_layer(x)
unit52_out = self.hidden_layer[:3](x)
unit26_out = self.hidden_layer[3](unit52_out)
unit13_out = self.hidden_layer[4](unit26_out)
return unit52_out, unit26_out, unit13_out
if __name__ == '__main__':
data = torch.randn(1, 3, 416, 416)
net = DarkNet53()
# out = net(data)
# print(out.shape)
# # torch.Size([1, 1024, 13, 13])
outs = net(data)
for out in outs:
print(out.shape)
# torch.Size([1, 256, 52, 52])
# torch.Size([1, 512, 26, 26])
# torch.Size([1, 1024, 13, 13])
# darknet_hidden_param = {
# 'channels': [32, 64, 128, 256, 512, 1024],
# 'block_nums': [1, 2, 8, 8, 4]
# }
# with open('data.yaml', 'r', encoding='utf-8') as file:
# # yaml.safe_dump(darknet_hidden_param, file)
# dic = yaml.safe_load(file)
# channels = dic['channels']
# block_nums = dic['block_nums']
# print(dic)
# # {'block_nums': [1, 2, 8, 8, 4], 'channels': [32, 64, 128, 256, 512, 1024]}
# print(channels)
# # [32, 64, 128, 256, 512, 1024]
# print(block_nums)
# # [1, 2, 8, 8, 4]
pass
yolov3.py
import torch
from torch import nn
from darknet53 import DarkNet53
from module import ConvolutionSet, CBL, UpSample
class YoLov3(nn.Module):
def __init__(self):
super().__init__()
self.backbone = DarkNet53()
self.conv1 = nn.Sequential(
ConvolutionSet(1024, 512)
)
self.detect_13 = nn.Sequential(
CBL(512, 256, 3, 1),
# 4分类 * 锚框: (1 + 4 + 4) * 3
CBL(256, 27, 1, 1)
)
self.neck_hidden1 = nn.Sequential(
CBL(512, 256, 1, 1),
UpSample()
)
self.conv2 = nn.Sequential(
ConvolutionSet(256 + 512, 256)
)
self.detect_26 = nn.Sequential(
CBL(256, 128, 3, 1),
CBL(128, 27, 1, 1)
)
self.neck_hidden2 = nn.Sequential(
CBL(256, 128, 1, 1),
UpSample()
)
self.conv3 = nn.Sequential(
ConvolutionSet(128 + 256, 128)
)
self.detect_52 = nn.Sequential(
CBL(128, 64, 3, 1),
CBL(64, 27, 1, 1)
)
def forward(self, x):
backbone_unit52_out, backbone_unit26_out, backbone_unit13_out = self.backbone(x)
conv1_out = self.conv1(backbone_unit13_out)
detect_13_out = self.detect_13(conv1_out)
neck_hidden1_out = self.neck_hidden1(conv1_out)
route26_out = torch.cat((neck_hidden1_out, backbone_unit26_out), dim=1)
conv2_out = self.conv2(route26_out)
detect_26_out = self.detect_26(conv2_out)
neck_hidden2_out = self.neck_hidden2(conv2_out)
route52_out = torch.cat((neck_hidden2_out, backbone_unit52_out), dim=1)
conv3_out = self.conv3(route52_out)
detect_52_out = self.detect_52(conv3_out)
return detect_13_out, detect_26_out, detect_52_out
if __name__ == '__main__':
data = torch.randn(1, 3, 416, 416)
yolov3 = YoLov3()
outs = yolov3(data)
for out in outs:
print(out.shape)
# torch.Size([1, 512, 13, 13])
# torch.Size([1, 256, 26, 26])
# torch.Size([1, 128, 52, 52])
# P0 P1 P2: N 27 H W
# 27: 类别(1 + 4 + 4) * 锚框3
# torch.Size([1, 27, 13, 13])
# torch.Size([1, 27, 26, 26])
# torch.Size([1, 27, 52, 52])
pass
训练模型
分析
- 准备数据dataset
- 初始化网络模型
- 损失函数
- 目标检测
- 正样本
- 置信度:二分类交叉熵
- 坐标:均方差损失
- 类别:交叉熵损失
- 负样本
- 置信度:二分类交叉熵
- 正样本
- 目标检测
- 优化器
实现结构
- train.py
- init
- 准备数据 dataset
- 初始化自定义数据集
- 数据加载器:批次、打乱次序
- 初始化网络模型 yolov3
- 切换设备
- 损失函数
- 置信度:二分类交叉熵BCEWithLogitsLoss
- 坐标:均方差损失MSELoss
- 类别:交叉熵损失CrossEntropyLoss
- 优化器 Adam
- 准备数据 dataset
- train
- 网络模型开启训练
- 遍历数据加载器获得三种特征大小标签值、图片张量,并切换设备
- 图片张量传入网络获得三种预期输出
- 三种标签值、对应预期输出值和正负样本因子传入loss_fn,计算获得对应损失,并求和获得模型损失
- 优化器进行梯度清零
- 模型损失反向传播
- 优化器进行梯度更新
- 累加模型损失计算平均损失
- 保存模型权重
- loss_fn
- 预期输出值更换通道 N 27 H W --> N H W 27 --> N H W 3 9
- 获取位置索引值
- 正样本数据位置 target[…, 0] > 0
- 负样本数据位置 target[…, 0] == 0
- 计算损失
- 正样本:置信度 坐标 类别
- 负样本:置信度
- 索引获取
- 0 置信度
- 1:5 坐标
- 5: 类别
- 正负样本乘上对应规模因子的累加和
- run
- 设定迭代次数,循环调用train训练模型
- init
完整代码
train.py
"""
分析
1. 准备数据dataset
2. 初始化网络模型
3. 损失函数
- 目标检测
- 正样本
- 置信度:二分类交叉熵
- 坐标:均方差损失
- 类别:交叉熵损失
- 负样本
- 置信度:二分类交叉熵
4. 优化器
"""
import os
import torch.optim
from torch import nn
from torch.utils.data import DataLoader
from yolov3 import YoLov3
from dataset import ODDateset
from config import cfg
device = cfg.device
class Train:
def __init__(self):
# 1. 准备数据dataset
od_dataset = ODDateset()
self.dataloader = DataLoader(od_dataset, batch_size=6, shuffle=True)
# 2. 初始化网络模型
self.net = YoLov3().to(device)
# 加载参数
# if os.path.exists(cfg.WEIGHT_PATH):
# self.net.load_state_dict(torch.load(cfg.WEIGHT_PATH))
# print('loading weights successfully')
# 3. 损失函数
# - 置信度:二分类交叉熵BCEWithLogitsLoss
self.conf_loss_fn = nn.BCEWithLogitsLoss()
# - 坐标:均方差损失MSELoss
self.loc_loss_fn = nn.MSELoss()
# - 类别:交叉熵损失CrossEntropyLoss
self.cls_loss_fn = nn.CrossEntropyLoss()
# 4. 优化器
self.opt = torch.optim.Adam(self.net.parameters())
def train(self, epoch):
"""
:param epoch: 迭代训练的次数
:return: None
1. 开启训练
2. 遍历数据加载器获取三种特征大小标签值、图片张量,并切换设备
3. 图片张量传入网络获得三种预期输出
4. 三种标签值、对应预期输出值和正负样本因子传入loss_fn,计算获得对应损失,并求和获得模型损失
5. 优化器进行梯度清零
6. 模型损失反向传播
7. 优化器进行梯度更新
8. 累加模型损失计算平均损失
9. 保存模型权重
"""
# 1. 开启训练
self.net.train()
# 累加损失
sum_loss = 0
for target_13, target_26, target_52, img in self.dataloader:
# 2. 获取三种特征大小标签值、图片张量,并切换设备
target_13, target_26, target_52 = target_13.to(device), target_26.to(device), target_52.to(device)
img = img.to(device)
# 3. 图片张量传入网络获得三种预期输出
pred_out_13, pred_out_26, pred_out_52 = self.net(img)
# 4.
loss_13 = self.loss_fn(target_13, pred_out_13, scale_factor=cfg.SCALE_FACTOR_BIG)
loss_26 = self.loss_fn(target_26, pred_out_26, scale_factor=cfg.SCALE_FACTOR_MID)
loss_52 = self.loss_fn(target_52, pred_out_52, scale_factor=cfg.SCALE_FACTOR_SML)
loss = loss_13 + loss_26 + loss_52
# 5. 梯度清零
self.opt.zero_grad()
# 6. 反向传播
loss.backward()
# 7. 梯度更新
self.opt.step()
sum_loss += loss.item()
avg_loss = sum_loss / len(self.dataloader)
print(f'{epoch}\t{avg_loss}')
if epoch % 10 == 0:
print('save weight')
torch.save(self.net.state_dict(), cfg.WEIGHT_PATH)
def loss_fn(self, target, pre_out, scale_factor):
"""
:param target: 标签
:param pre_out: 预期输出
:param scale_factor: 正负样本因子
:return: 正负样本乘上对应规模因子的累加和
1. 预期输出值更换通道 N 27 H W --> N H W 27 --> N H W 3 9
2. 获取位置索引值
- 正样本数据位置 target[..., 0] > 0
- 负样本数据位置 target[..., 0] == 0
3. 计算损失
- 正样本:置信度 坐标 类别
- 负样本:置信度
- 索引获取
- 0 置信度
- 1:5 坐标
- 5: 类别
4. 正负样本乘上对应规模因子的累加和
"""
# 1. 预期输出值更换通道 N 27 H W --> N H W 27 --> N H W 3 9
pre_out = pre_out.permute((0, 2, 3, 1))
n, h, w, _ = pre_out.shape
pre_out = torch.reshape(pre_out, (n, h, w, 3, -1))
# 2. 获取位置索引值 正样本数据位置 target[..., 0] > 0 负样本数据位置 target[..., 0] == 0
mask_obj = target[..., 0] > 0
mask_noobj = target[..., 0] == 0
# 3. 计算损失
# 正样本:置信度 坐标 类别
target_obj = target[mask_obj]
output_obj = pre_out[mask_obj]
conf_loss = self.conf_loss_fn(output_obj[:, 0], target_obj[:, 0])
loc_loss = self.loc_loss_fn(output_obj[:, 1:5], target_obj[:, 1:5])
cls_loss = self.cls_loss_fn(output_obj[:, 5:], torch.argmax(target_obj[:, 5:], dim=1))
loss_obj = conf_loss + loc_loss + cls_loss
# 负样本:置信度
target_noobj = target[mask_noobj]
output_noobj = pre_out[mask_noobj]
loss_noobj = self.conf_loss_fn(output_noobj[:, 0], target_noobj[:, 0])
# 4. 正负样本乘上对应规模因子的累加和
return loss_obj * scale_factor + loss_noobj * (1 - scale_factor)
def run(self):
for epoch in range(500):
self.train(epoch)
pass
if __name__ == '__main__':
train = Train()
train.run()
pass
推理预测
分析
- 网络初始化,加载权重参数 net
- 输入数据预处理(归一化) img_norm
- 前向传播获得输出,输出数据形状是 N C H W --> N 3(锚框数量 anchor_num) 9 H W
- 根据给定的阈值 thresh 获取符合阈值要求目标的索引
- idx = torch.where([:, :, 0, :, :] > thresh
- N: idx[0]
- anchor_num = idx[1]
- H(rows): idx[2]
- W(cols): idx[3]
- 解码中心点坐标 cx cy
- cx_idx = 2
- cy_idx = 1
- tx = [:, :, 1, :, :]
- ty = [:, :, 2, :, :]
- tw = [:, :, 3, :, :]
- th = [:, :, 4, :, :]
- cx = (cx_idx + tx) * 32
- cy = (cy_idx + ty) * 32
- pred_w = exp(tw) * anchor_w
- pred_h = exp(th) * anchor_h
实现结构
- detect.py
- init
- 初始化网络
- 网络开启验证
- 网络加载参数
- forward
- 图像预处理
- 图片转为张量
- 扩张维度,表示批次
- 图片张量传给网络获得检测输出
- 对检测输出进行解码 decode,获得检测框信息
- 拼接大中小目标框信息并返回
- 图像预处理
- decode
- 预期输出值更换通道 N 27 H W --> N H W 27 --> N H W 3 9
- 获取检测框的坐标索引 锚框数量
- 获取检测框的标签信息 [[conf, tx, ty, tw, th, cls], …]
- 方式1:label = pred_out[idx[0], idx[1], idx[2], idx[3], :]
- 方式2:label = pred_out[idx]
- 计算检测框的中心坐标 宽高
- 规模因子 = 原图大小 / 特征大小
- 获取当前特征对应的三种锚框
- 获取索引对应的锚框的宽高
- 坐标转换:中心点坐标+宽高 --> 左上角坐标+右下角坐标
- torch.stack 整合坐标 [conf, x_min, y_min, x_max, y_max, cls]
- run
- 传入图片进行前向传播,获得预测框信息
- 根据不同类别,遍历框信息,进行NMS,获得各类别最优框
- 不同类别绘制不同颜色的检测框,并标注类别名
- 保存框的置信度和坐标信息,以便计算mAP
- init
- util.py
- bbox_iou
- 计算标签框和输出框的交并比
- nms
- 模型输出的框,按置信度排序
- 置信度最高的,作为当前类别最优的框 max_conf_box = detect_boxes[0]
- 剩余的框 detect_boxes[1:] 和当前最优框 max_conf_box 计算IOU 获取 iou_val
- 和给定阈值(超参数)作比较 iou_idx = iou_val < thresh
- detect_boxes[1:][iou_idx] 则为保留的框
完整代码
detect.py
"""
分析
1. 网络初始化,加载权重参数 net
2. 输入数据预处理(归一化) img_norm
3. 前向传播获取预期输出,计算获取 cx cy pred_w pred_h
- 切片获取数据 cls, tx, ty, tw, th, one_hot
- cx = (索引 + tx) * 特征规模大小
- cy = (索引 + ty) * 特征规模大小
- pred_w = exp(tw) * anchor_w
- pred_h = exp(th) * anchor_h
4. 绘制检测框
"""
import os
import cv2
import torch
from torch import nn
from yolov3 import YoLov3
from config import cfg
from util import util
class Detector(nn.Module):
def __init__(self):
super().__init__()
# 1. 网络初始化
net = YoLov3()
# 开启验证
net.eval()
# 加载权重参数 net
net.load_state_dict(torch.load(cfg.WEIGHT_PATH))
print('loading weights successfully')
self.net = net
def normalize(self, frame):
frame_tensor = util.t(frame)
frame_tensor = torch.unsqueeze(frame_tensor, dim=0)
return frame_tensor
def decode(self, pred_out, feature, threshold):
# 1. 预期输出值更换通道 N 27 H W --> N H W 27 --> N H W 3 9
pred_out = pred_out.permute((0, 2, 3, 1))
n, h, w, _ = pred_out.shape
pred_out = torch.reshape(pred_out, (n, h, w, 3, -1))
# 2. 获取检测框的坐标索引 锚框数量
idx = torch.where(pred_out[:, :, :, :, 0] > threshold)
# N H W 3(锚框数量)
# - N: idx[0]
# - H(rows): idx[1]
# - W(cols): idx[2]
# - anchor_num = idx[3]
h_idx = idx[1]
w_idx = idx[2]
anchor_num = idx[3]
# 3. 获取检测框的标签信息 [[conf, tx, ty, tw, th, cls], ...]
# 方式1
# label = pred_out[idx[0], idx[1], idx[2], idx[3], :]
# 方式2
label = pred_out[idx]
# N V
# [[conf, tx, ty, tw, th, cls], ...]
conf = label[:, 0]
tx = label[:, 1]
ty = label[:, 2]
tw = label[:, 3]
th = label[:, 4]
cls = torch.argmax(label[:, 5:], dim=1)
# 4. 计算检测框的中心坐标 宽高
# 规模因子 = 原图大小 / 特征大小
scale_factor = cfg.IMG_ORI_SIZE / feature
cx = (tx + w_idx) * scale_factor
cy = (ty + h_idx) * scale_factor
# 当前特征对应的三种锚框
anchors = cfg.ANCHORS_GROUP[feature]
# anchors 类型是list 转为张量便于高级索引
anchors = torch.tensor(anchors)
# 获取索引对应的锚框的宽高
anchor_w = anchors[anchor_num][:, 0]
anchor_h = anchors[anchor_num][:, 1]
pred_w = torch.exp(tw) * anchor_w
pred_h = torch.exp(th) * anchor_h
# 5. 坐标转换:中心点坐标+宽高 --> 左上角坐标+右下角坐标
x_min = cx - pred_w / 2
y_min = cy - pred_h / 2
x_max = cx + pred_w / 2
y_max = cy + pred_h / 2
# torch.stack 整合坐标 [conf, x_min, y_min, x_max, y_max, cls]
out = torch.stack((conf, x_min, y_min, x_max, y_max, cls), dim=1)
return out
def show_image(self, img, x1, y1, x2, y2, cls):
cv2.rectangle(img,
(int(x1), int(y1)),
(int(x2), int(y2)),
color=cfg.COLOR_DIC[int(cls)],
thickness=2)
cv2.putText(img,
text=cfg.CLS_DIC[int(cls)],
org=(int(x1) + 5, int(y1) + 10),
color=cfg.COLOR_DIC[int(cls)],
fontScale=0.5,
fontFace=cv2.FONT_ITALIC)
cv2.imshow('img', img)
cv2.waitKey(25)
def forward(self, img, threshold):
img_norm = self.normalize(img)
pred_out_13, pred_out_26, pred_out_52 = self.net(img_norm)
f_big, f_mid, f_sml = cfg.ANCHORS_GROUP.keys()
box_13 = self.decode(pred_out_13, f_big, threshold)
box_26 = self.decode(pred_out_26, f_mid, threshold)
box_52 = self.decode(pred_out_52, f_sml, threshold)
boxes = torch.cat((box_13, box_26, box_52), dim=0)
return box_52
def run(self, img_names):
for img_name in img_names:
img_path = os.path.join(cfg.BASE_IMG_PATH, img_name)
img = cv2.imread(img_path)
detect_out = detect(img, cfg.THRESHOLD_BOX)
if len(detect_out) == 0:
continue
filter_boxes = []
for cls in range(4):
mask_cls = detect_out[..., -1] == cls
_boxes = detect_out[mask_cls]
boxes = util.nms(_boxes, cfg.THRESHOLD_NMS)
if len(boxes) == 0:
continue
filter_boxes.append(boxes)
for boxes in filter_boxes:
for box in boxes:
conf, x1, y1, x2, y2, cls = box
self.show_image(img, x1, y1, x2, y2, cls)
# cv2.imwrite(os.path.join(f"./run/imgs/{img_name}"), img)
# 保存box信息
# file_name = img_name.split('.')[0] + '.txt'
# file_path = os.path.join('../data/cal_map/input/detection-results', file_name)
# with open(file_path, 'a', encoding='utf-8') as file:
# conf_norm = nn.Sigmoid()(conf)
# file.write(f"{cfg.CLS_DIC[int(cls)]} {conf_norm} {int(x1)} {int(y1)} {int(x2)} {int(y2)}\n")
if __name__ == '__main__':
detect = Detector()
# frame = cv2.imread('../data/VOC2007/YOLOv3_JPEGImages/2.jpg')
# boxes = detect(frame, 1)
# # 获取同种类的框,进行NMS
# boxes = util.nms(boxes, 0.1)
# for box in boxes:
# conf, x1, y1, x2, y2, cls = box.detach().cpu().numpy()
# detect.show_image(frame, x1, y1, x2, y2, cls)
# # cv2.imshow('frame', frame)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
# 多张图片
img_names = os.listdir(cfg.BASE_IMG_PATH)
detect.run(img_names)
pass
util.py
import torch
from torchvision import transforms
from config import cfg
t = transforms.Compose([
# H W C --> C H W 且把值归一化为 0-1
transforms.ToTensor()
])
def bbox_iou(box, boxes):
box_area = (box[2] - box[0]) * (box[3] - box[1])
boxes_area = (boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1])
l_x = torch.maximum(box[0], boxes[:, 0])
l_y = torch.maximum(box[1], boxes[:, 1])
r_x = torch.minimum(box[2], boxes[:, 2])
r_y = torch.minimum(box[3], boxes[:, 3])
w = torch.maximum(r_x - l_x, torch.tensor(0))
h = torch.maximum(r_y - l_y, torch.tensor(0))
inter_area = w * h
iou_val = inter_area / (box_area + boxes_area - inter_area)
return iou_val
def nms(detect_boxes, threshold=0.5):
"""
:param detect_boxes: 侦测输出的框的信息 [[conf, tx, ty, tw, th, cls], ...]
:param threshold: 阈值
:return: 筛选后的侦测框
流程分析
1. 模型输出的框,按置信度排序
2. 置信度最高的,作为当前类别最优的框 max_conf_box = detect_boxes[0]
3. 剩余的框 detect_boxes[1:] 和当前最优框 max_conf_box 计算IOU 获取 iou_val
4. 和给定阈值(超参数)作比较 iou_idx = iou_val < thresh
5. detect_boxes[1:][iou_idx] 则为保留的框
"""
# 保留最优框信息
best_boxes = []
# 1. 模型输出的框,按置信度排序
idx = torch.argsort(detect_boxes[:, 0], descending=True)
detect_boxes = detect_boxes[idx]
while detect_boxes.size(0) > 0:
# 2. 置信度最高的,作为当前类别最优的框
max_conf_box = detect_boxes[0]
best_boxes.append(max_conf_box)
# 3. 剩余的框 detect_boxes[1:] 和当前最优框 max_conf_box 计算IOU
detect_boxes = detect_boxes[1:]
iou_val = bbox_iou(max_conf_box[1:5], detect_boxes[:, 1:5])
# 4. 和给定阈值(超参数)作比较保留小于阈值的对应框
detect_boxes = detect_boxes[iou_val < threshold]
return best_boxes
参数配置文件
cfg.py
import torch
'自定义锚框'
ANCHORS_GROUP = {
13: [[360, 360], [360, 180], [180, 360]],
26: [[180, 180], [180, 90], [90, 180]],
52: [[90, 90], [90, 45], [45, 90]]
}
'yolo5 coco数据集锚框'
ANCHORS_DIC = {
13: [[116, 90], [156, 198], [373, 326]],
26: [[30, 61], [62, 45], [59, 119]],
52: [[10, 13], [16, 30], [33, 23]]
}
device = 'cuda:0' if torch.cuda.is_available() else 'cpu'
CLASS_NUM = 4
IMG_ORI_SIZE = 416
BASE_IMG_PATH = r'E:\pythonProject\yolo3\data\VOC2007\YOLOv3_JPEGImages'
BASE_LABEL_PATH = r'E:\pythonProject\yolo3\data\VOC2007\yolo_annotation.txt'
WEIGHT_PATH = r'E:\pythonProject\yolo3\net\weights\best.pt'
SCALE_FACTOR_BIG = 0.9
SCALE_FACTOR_MID = 0.9
SCALE_FACTOR_SML = 0.9
'阈值'
THRESHOLD_BOX = 0.9
THRESHOLD_NMS = 0.1
'视频路径'
VIDEO_PATH = r'E:\pythonProject\yolo3\data\video\fish_video.mp4'
VIDEO2FRAME_PATH = r'E:\pythonProject\yolo3\data\VOC2007\JPEGImages'
'网络参数'
DARKNET35_PARAM_PATH = r'E:\pythonProject\yolo3\config\data.yaml'
'检测类别'
CLS_DIC = {
0: 'big_fish',
1: 'small_fish'
}
COLOR_DIC = {0: (0, 0, 255), 1: (100, 200, 255), 2: (255, 0, 0), 3: (0, 255, 0)}
计算评价指标
- Github上下载一个mAP源码(如:
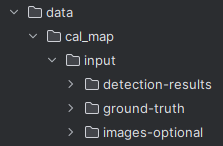
https://github.com/Cartucho/mAP.git) - 手动创建计算mAP的输入数据文件夹
- input
- detection-results:模型输出数据集
- ground-truth:标签数据集
- images-optional:原图缩放后的数据集
- input
- data/VOC2007/YOLOv3_JPEGImages数据拷贝到images-optional
- data/VOC2007/Annotations数据拷贝到ground-truth
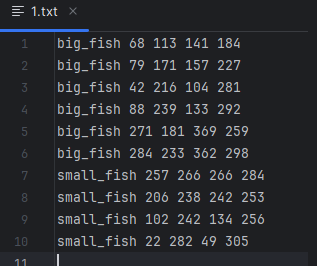
- 运行convert_gt_xml.py,把
.xml文件转为.txt文件- 其中
.txt文件保存的是图片标签框的类别名+坐标信息cls_name xmin ymin xmax ymax
- 其中
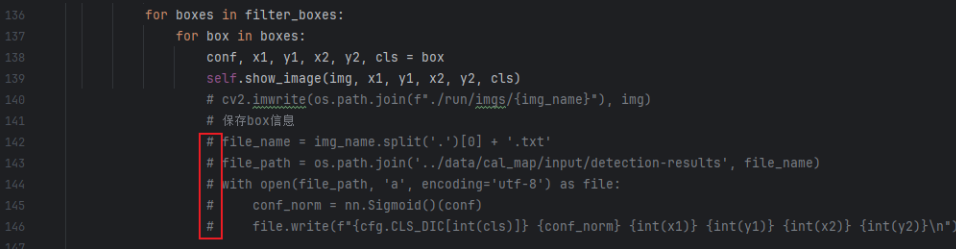
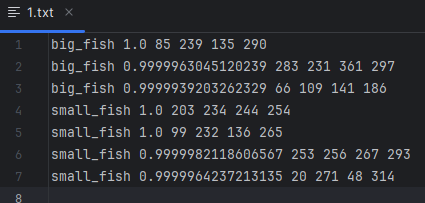
- detector.py取消142-146行代码的注释,运行代码后,detection-results文件夹会保存模型输出框的
.txt文件- 其中
.txt文件保存的是图片标签框的类别名+置信度+坐标信息cls_name conf xmin ymin xmax ymax
- 其中
- 运行map.py会自动生成output文件,弹出mAP图

完整代码
convert_gt_xml.py
import sys
import os
import glob
import xml.etree.ElementTree as ET
# make sure that the cwd() in the beginning is the location of the python script (so that every path makes sense)
os.chdir(os.path.dirname(os.path.abspath(__file__)))
# change directory to the one with the files to be changed
parent_path = os.path.abspath(os.path.join(os.getcwd(), os.pardir))
parent_path = os.path.abspath(os.path.join(parent_path, os.pardir))
# GT_PATH = os.path.join(parent_path, 'input','ground-truth')
yolo3_path = os.getcwd().rsplit('\\', 1)[:1][0]
# 'E:\\pythonProject\\yolo3'
GT_PATH = os.path.join(yolo3_path, 'data', 'cal_map', 'input', 'ground-truth')
#print(GT_PATH)
os.chdir(GT_PATH)
# old files (xml format) will be moved to a "backup" folder
## create the backup dir if it doesn't exist already
if not os.path.exists("backup"):
os.makedirs("backup")
# create VOC format files
xml_list = glob.glob('*.xml')
if len(xml_list) == 0:
print("Error: no .xml files found in ground-truth")
sys.exit()
for tmp_file in xml_list:
#print(tmp_file)
# 1. create new file (VOC format)
with open(tmp_file.replace(".xml", ".txt"), "a") as new_f:
root = ET.parse(tmp_file).getroot()
for obj in root.findall('object'):
obj_name = obj.find('name').text
bndbox = obj.find('bndbox')
left = bndbox.find('xmin').text
top = bndbox.find('ymin').text
right = bndbox.find('xmax').text
bottom = bndbox.find('ymax').text
new_f.write("%s %s %s %s %s\n" % (obj_name, left, top, right, bottom))
# 2. move old file (xml format) to backup
os.rename(tmp_file, os.path.join("backup", tmp_file))
print("Conversion completed!")
voc2yolo_v3.py
import glob
import xml.etree.ElementTree as ET
import os
def xml_to_yolo(xml_path, img_path, save_dir):
img_name = os.path.basename(img_path)
xml_name_pre = os.path.basename(xml_path).split(".")[0]
img_name_pre = os.path.basename(img_path).split(".")[0]
if xml_name_pre != img_name_pre:
print("xml_name is not equal to img_name")
return
tree = ET.parse(xml_path)
root = tree.getroot()
# 拼接格式 图片地址 类别1 cx cy w h 类别2 cx cy w h
img_annotation = img_name
for obj in root.findall('object'):
class_name = obj.find('name').text
xmin = float(obj.find('bndbox/xmin').text)
ymin = float(obj.find('bndbox/ymin').text)
xmax = float(obj.find('bndbox/xmax').text)
ymax = float(obj.find('bndbox/ymax').text)
# Convert to YOLO format
x_center = int((xmin + xmax) / 2)
y_center = int((ymin + ymax) / 2)
box_width = int((xmax - xmin))
box_height = int((ymax - ymin))
cls_id = cls_dic[class_name]
# cls_id = 0
img_annotation += f"\t\t{cls_id}\t{x_center}\t{y_center}\t{box_width}\t{box_height}\t"
# Create a text file to save YOLO annotations
file_name = os.path.splitext(os.path.basename(xml_path))[0] + '.txt'
if os.path.isdir(save_directory):
save_path = os.path.join(save_dir, file_name)
else:
save_path = save_dir
with open(save_path, 'a+') as file:
file.write(img_annotation + '\n')
return save_path
if __name__ == '__main__':
# 保存为YOLOv3需要的txt格式
save_directory = r'../data/VOC2007/yolo_annotation.txt'
# 获取转换宽高为416x416之后的标签,用于进行等比例缩放
xml_paths = glob.glob(os.path.join(r'../data/VOC2007/Annotations', "*"))
# 转换之后的原图像
img_paths = glob.glob(os.path.join(r"../data/VOC2007/YOLOv3_JPEGImages", "*"))
# cls_dic = {"fish_gray": 0, "fish_red": 1, "fish_black": 2}
# cls_dic = {"person": 0, "dog": 1, "cat": 2, "horse": 3}
cls_dic = {"big_fish": 0, "small_fish": 1}
for idx, xml_path in enumerate(xml_paths):
img_path = img_paths[idx]
saved_path = xml_to_yolo(xml_path, img_path, save_directory)
print(f"YOLO annotations saved to: {saved_path}")
map.py
import glob
import json
import os
import shutil
import operator
import sys
import argparse
import math
import numpy as np
MINOVERLAP = 0.5 # default value (defined in the PASCAL VOC2012 challenge)
parser = argparse.ArgumentParser()
parser.add_argument('-na', '--no-animation', help="no animation is shown.", action="store_true")
parser.add_argument('-np', '--no-plot', help="no plot is shown.", action="store_true")
parser.add_argument('-q', '--quiet', help="minimalistic console output.", action="store_true")
# argparse receiving list of classes to be ignored (e.g., python main.py --ignore person book)
parser.add_argument('-i', '--ignore', nargs='+', type=str, help="ignore a list of classes.")
# argparse receiving list of classes with specific IoU (e.g., python main.py --set-class-iou person 0.7)
parser.add_argument('--set-class-iou', nargs='+', type=str, help="set IoU for a specific class.")
args = parser.parse_args()
'''
0,0 ------> x (width)
|
| (Left,Top)
| *_________
| | |
| |
y |_________|
(height) *
(Right,Bottom)
'''
# if there are no classes to ignore then replace None by empty list
if args.ignore is None:
args.ignore = []
specific_iou_flagged = False
if args.set_class_iou is not None:
specific_iou_flagged = True
# make sure that the cwd() is the location of the python script (so that every path makes sense)
os.chdir(os.path.dirname(os.path.abspath(__file__)))
# GT_PATH = os.path.join(os.getcwd(), 'input', 'ground-truth')
# DR_PATH = os.path.join(os.getcwd(), 'input', 'detection-results')
# # if there are no images then no animation can be shown
# IMG_PATH = os.path.join(os.getcwd(), 'input', 'images-optional')
yolo3_path = os.getcwd().rsplit('\\', 1)[:1][0]
# 'E:\\pythonProject\\yolo3'
GT_PATH = os.path.join(yolo3_path, 'data', 'cal_map', 'input', 'ground-truth')
DR_PATH = os.path.join(yolo3_path, 'data', 'cal_map', 'input', 'detection-results')
# if there are no images then no animation can be shown
IMG_PATH = os.path.join(yolo3_path, 'data', 'cal_map', 'input', 'images-optional')
if os.path.exists(IMG_PATH):
for dirpath, dirnames, files in os.walk(IMG_PATH):
if not files:
# no image files found
args.no_animation = True
else:
args.no_animation = True
# try to import OpenCV if the user didn't choose the option --no-animation
show_animation = False
if not args.no_animation:
try:
import cv2
show_animation = True
except ImportError:
print("\"opencv-python\" not found, please install to visualize the results.")
args.no_animation = True
# try to import Matplotlib if the user didn't choose the option --no-plot
draw_plot = False
if not args.no_plot:
try:
import matplotlib.pyplot as plt
draw_plot = True
except ImportError:
print("\"matplotlib\" not found, please install it to get the resulting plots.")
args.no_plot = True
def log_average_miss_rate(prec, rec, num_images):
"""
log-average miss rate:
Calculated by averaging miss rates at 9 evenly spaced FPPI points
between 10e-2 and 10e0, in log-space.
output:
lamr | log-average miss rate
mr | miss rate
fppi | false positives per image
references:
[1] Dollar, Piotr, et al. "Pedestrian Detection: An Evaluation of the
State of the Art." Pattern Analysis and Machine Intelligence, IEEE
Transactions on 34.4 (2012): 743 - 761.
"""
# if there were no detections of that class
if prec.size == 0:
lamr = 0
mr = 1
fppi = 0
return lamr, mr, fppi
fppi = (1 - prec)
mr = (1 - rec)
fppi_tmp = np.insert(fppi, 0, -1.0)
mr_tmp = np.insert(mr, 0, 1.0)
# Use 9 evenly spaced reference points in log-space
ref = np.logspace(-2.0, 0.0, num = 9)
for i, ref_i in enumerate(ref):
# np.where() will always find at least 1 index, since min(ref) = 0.01 and min(fppi_tmp) = -1.0
j = np.where(fppi_tmp <= ref_i)[-1][-1]
ref[i] = mr_tmp[j]
# log(0) is undefined, so we use the np.maximum(1e-10, ref)
lamr = math.exp(np.mean(np.log(np.maximum(1e-10, ref))))
return lamr, mr, fppi
"""
throw error and exit
"""
def error(msg):
print(msg)
sys.exit(0)
"""
check if the number is a float between 0.0 and 1.0
"""
def is_float_between_0_and_1(value):
try:
val = float(value)
if val > 0.0 and val < 1.0:
return True
else:
return False
except ValueError:
return False
"""
Calculate the AP given the recall and precision array
1st) We compute a version of the measured precision/recall curve with
precision monotonically decreasing
2nd) We compute the AP as the area under this curve by numerical integration.
"""
def voc_ap(rec, prec):
"""
--- Official matlab code VOC2012---
mrec=[0 ; rec ; 1];
mpre=[0 ; prec ; 0];
for i=numel(mpre)-1:-1:1
mpre(i)=max(mpre(i),mpre(i+1));
end
i=find(mrec(2:end)~=mrec(1:end-1))+1;
ap=sum((mrec(i)-mrec(i-1)).*mpre(i));
"""
rec.insert(0, 0.0) # insert 0.0 at begining of list
rec.append(1.0) # insert 1.0 at end of list
mrec = rec[:]
prec.insert(0, 0.0) # insert 0.0 at begining of list
prec.append(0.0) # insert 0.0 at end of list
mpre = prec[:]
"""
This part makes the precision monotonically decreasing
(goes from the end to the beginning)
matlab: for i=numel(mpre)-1:-1:1
mpre(i)=max(mpre(i),mpre(i+1));
"""
# matlab indexes start in 1 but python in 0, so I have to do:
# range(start=(len(mpre) - 2), end=0, step=-1)
# also the python function range excludes the end, resulting in:
# range(start=(len(mpre) - 2), end=-1, step=-1)
for i in range(len(mpre)-2, -1, -1):
mpre[i] = max(mpre[i], mpre[i+1])
"""
This part creates a list of indexes where the recall changes
matlab: i=find(mrec(2:end)~=mrec(1:end-1))+1;
"""
i_list = []
for i in range(1, len(mrec)):
if mrec[i] != mrec[i-1]:
i_list.append(i) # if it was matlab would be i + 1
"""
The Average Precision (AP) is the area under the curve
(numerical integration)
matlab: ap=sum((mrec(i)-mrec(i-1)).*mpre(i));
"""
ap = 0.0
for i in i_list:
ap += ((mrec[i]-mrec[i-1])*mpre[i])
return ap, mrec, mpre
"""
Convert the lines of a file to a list
"""
def file_lines_to_list(path):
# open txt file lines to a list
with open(path) as f:
content = f.readlines()
# remove whitespace characters like `\n` at the end of each line
content = [x.strip() for x in content]
return content
"""
Draws text in image
"""
def draw_text_in_image(img, text, pos, color, line_width):
font = cv2.FONT_HERSHEY_PLAIN
fontScale = 1
lineType = 1
bottomLeftCornerOfText = pos
cv2.putText(img, text,
bottomLeftCornerOfText,
font,
fontScale,
color,
lineType)
text_width, _ = cv2.getTextSize(text, font, fontScale, lineType)[0]
return img, (line_width + text_width)
"""
Plot - adjust axes
"""
def adjust_axes(r, t, fig, axes):
# get text width for re-scaling
bb = t.get_window_extent(renderer=r)
text_width_inches = bb.width / fig.dpi
# get axis width in inches
current_fig_width = fig.get_figwidth()
new_fig_width = current_fig_width + text_width_inches
propotion = new_fig_width / current_fig_width
# get axis limit
x_lim = axes.get_xlim()
axes.set_xlim([x_lim[0], x_lim[1]*propotion])
"""
Draw plot using Matplotlib
"""
def draw_plot_func(dictionary, n_classes, window_title, plot_title, x_label, output_path, to_show, plot_color, true_p_bar):
# sort the dictionary by decreasing value, into a list of tuples
sorted_dic_by_value = sorted(dictionary.items(), key=operator.itemgetter(1))
# unpacking the list of tuples into two lists
sorted_keys, sorted_values = zip(*sorted_dic_by_value)
#
if true_p_bar != "":
"""
Special case to draw in:
- green -> TP: True Positives (object detected and matches ground-truth)
- red -> FP: False Positives (object detected but does not match ground-truth)
- pink -> FN: False Negatives (object not detected but present in the ground-truth)
"""
fp_sorted = []
tp_sorted = []
for key in sorted_keys:
fp_sorted.append(dictionary[key] - true_p_bar[key])
tp_sorted.append(true_p_bar[key])
plt.barh(range(n_classes), fp_sorted, align='center', color='crimson', label='False Positive')
plt.barh(range(n_classes), tp_sorted, align='center', color='forestgreen', label='True Positive', left=fp_sorted)
# add legend
plt.legend(loc='lower right')
"""
Write number on side of bar
"""
fig = plt.gcf() # gcf - get current figure
axes = plt.gca()
r = fig.canvas.get_renderer()
for i, val in enumerate(sorted_values):
fp_val = fp_sorted[i]
tp_val = tp_sorted[i]
fp_str_val = " " + str(fp_val)
tp_str_val = fp_str_val + " " + str(tp_val)
# trick to paint multicolor with offset:
# first paint everything and then repaint the first number
t = plt.text(val, i, tp_str_val, color='forestgreen', va='center', fontweight='bold')
plt.text(val, i, fp_str_val, color='crimson', va='center', fontweight='bold')
if i == (len(sorted_values)-1): # largest bar
adjust_axes(r, t, fig, axes)
else:
plt.barh(range(n_classes), sorted_values, color=plot_color)
"""
Write number on side of bar
"""
fig = plt.gcf() # gcf - get current figure
axes = plt.gca()
r = fig.canvas.get_renderer()
for i, val in enumerate(sorted_values):
str_val = " " + str(val) # add a space before
if val < 1.0:
str_val = " {0:.2f}".format(val)
t = plt.text(val, i, str_val, color=plot_color, va='center', fontweight='bold')
# re-set axes to show number inside the figure
if i == (len(sorted_values)-1): # largest bar
adjust_axes(r, t, fig, axes)
# set window title
fig.canvas.manager.set_window_title(window_title)
# write classes in y axis
tick_font_size = 12
plt.yticks(range(n_classes), sorted_keys, fontsize=tick_font_size)
"""
Re-scale height accordingly
"""
init_height = fig.get_figheight()
# comput the matrix height in points and inches
dpi = fig.dpi
height_pt = n_classes * (tick_font_size * 1.4) # 1.4 (some spacing)
height_in = height_pt / dpi
# compute the required figure height
top_margin = 0.15 # in percentage of the figure height
bottom_margin = 0.05 # in percentage of the figure height
figure_height = height_in / (1 - top_margin - bottom_margin)
# set new height
if figure_height > init_height:
fig.set_figheight(figure_height)
# set plot title
plt.title(plot_title, fontsize=14)
# set axis titles
# plt.xlabel('classes')
plt.xlabel(x_label, fontsize='large')
# adjust size of window
fig.tight_layout()
# save the plot
fig.savefig(output_path)
# show image
if to_show:
plt.show()
# close the plot
plt.close()
"""
Create a ".temp_files/" and "output/" directory
"""
TEMP_FILES_PATH = ".temp_files"
if not os.path.exists(TEMP_FILES_PATH): # if it doesn't exist already
os.makedirs(TEMP_FILES_PATH)
# output_files_path = "output"
output_files_path = r'E:\pythonProject\yolo3\data\cal_map\output'
if os.path.exists(output_files_path): # if it exist already
# reset the output directory
shutil.rmtree(output_files_path)
os.makedirs(output_files_path)
if draw_plot:
os.makedirs(os.path.join(output_files_path, "classes"))
if show_animation:
os.makedirs(os.path.join(output_files_path, "images", "detections_one_by_one"))
"""
ground-truth
Load each of the ground-truth files into a temporary ".json" file.
Create a list of all the class names present in the ground-truth (gt_classes).
"""
# get a list with the ground-truth files
ground_truth_files_list = glob.glob(GT_PATH + '/*.txt')
if len(ground_truth_files_list) == 0:
error("Error: No ground-truth files found!")
ground_truth_files_list.sort()
# dictionary with counter per class
gt_counter_per_class = {}
counter_images_per_class = {}
gt_files = []
for txt_file in ground_truth_files_list:
#print(txt_file)
file_id = txt_file.split(".txt", 1)[0]
file_id = os.path.basename(os.path.normpath(file_id))
# check if there is a correspondent detection-results file
temp_path = os.path.join(DR_PATH, (file_id + ".txt"))
if not os.path.exists(temp_path):
error_msg = "Error. File not found: {}\n".format(temp_path)
error_msg += "(You can avoid this error message by running extra/intersect-gt-and-dr.py)"
error(error_msg)
lines_list = file_lines_to_list(txt_file)
# create ground-truth dictionary
bounding_boxes = []
is_difficult = False
already_seen_classes = []
for line in lines_list:
try:
if "difficult" in line:
class_name, left, top, right, bottom, _difficult = line.split()
is_difficult = True
else:
class_name, left, top, right, bottom = line.split()
except ValueError:
error_msg = "Error: File " + txt_file + " in the wrong format.\n"
error_msg += " Expected: <class_name> <left> <top> <right> <bottom> ['difficult']\n"
error_msg += " Received: " + line
error_msg += "\n\nIf you have a <class_name> with spaces between words you should remove them\n"
error_msg += "by running the script \"remove_space.py\" or \"rename_class.py\" in the \"extra/\" folder."
error(error_msg)
# check if class is in the ignore list, if yes skip
if class_name in args.ignore:
continue
bbox = left + " " + top + " " + right + " " +bottom
if is_difficult:
bounding_boxes.append({"class_name":class_name, "bbox":bbox, "used":False, "difficult":True})
is_difficult = False
else:
bounding_boxes.append({"class_name":class_name, "bbox":bbox, "used":False})
# count that object
if class_name in gt_counter_per_class:
gt_counter_per_class[class_name] += 1
else:
# if class didn't exist yet
gt_counter_per_class[class_name] = 1
if class_name not in already_seen_classes:
if class_name in counter_images_per_class:
counter_images_per_class[class_name] += 1
else:
# if class didn't exist yet
counter_images_per_class[class_name] = 1
already_seen_classes.append(class_name)
# dump bounding_boxes into a ".json" file
new_temp_file = TEMP_FILES_PATH + "/" + file_id + "_ground_truth.json"
gt_files.append(new_temp_file)
with open(new_temp_file, 'w') as outfile:
json.dump(bounding_boxes, outfile)
gt_classes = list(gt_counter_per_class.keys())
# let's sort the classes alphabetically
gt_classes = sorted(gt_classes)
n_classes = len(gt_classes)
#print(gt_classes)
#print(gt_counter_per_class)
"""
Check format of the flag --set-class-iou (if used)
e.g. check if class exists
"""
if specific_iou_flagged:
n_args = len(args.set_class_iou)
error_msg = \
'\n --set-class-iou [class_1] [IoU_1] [class_2] [IoU_2] [...]'
if n_args % 2 != 0:
error('Error, missing arguments. Flag usage:' + error_msg)
# [class_1] [IoU_1] [class_2] [IoU_2]
# specific_iou_classes = ['class_1', 'class_2']
specific_iou_classes = args.set_class_iou[::2] # even
# iou_list = ['IoU_1', 'IoU_2']
iou_list = args.set_class_iou[1::2] # odd
if len(specific_iou_classes) != len(iou_list):
error('Error, missing arguments. Flag usage:' + error_msg)
for tmp_class in specific_iou_classes:
if tmp_class not in gt_classes:
error('Error, unknown class \"' + tmp_class + '\". Flag usage:' + error_msg)
for num in iou_list:
if not is_float_between_0_and_1(num):
error('Error, IoU must be between 0.0 and 1.0. Flag usage:' + error_msg)
"""
detection-results
Load each of the detection-results files into a temporary ".json" file.
"""
# get a list with the detection-results files
dr_files_list = glob.glob(DR_PATH + '/*.txt')
dr_files_list.sort()
for class_index, class_name in enumerate(gt_classes):
bounding_boxes = []
for txt_file in dr_files_list:
#print(txt_file)
# the first time it checks if all the corresponding ground-truth files exist
file_id = txt_file.split(".txt",1)[0]
file_id = os.path.basename(os.path.normpath(file_id))
temp_path = os.path.join(GT_PATH, (file_id + ".txt"))
if class_index == 0:
if not os.path.exists(temp_path):
error_msg = "Error. File not found: {}\n".format(temp_path)
error_msg += "(You can avoid this error message by running extra/intersect-gt-and-dr.py)"
error(error_msg)
lines = file_lines_to_list(txt_file)
for line in lines:
try:
tmp_class_name, confidence, left, top, right, bottom = line.split()
except ValueError:
error_msg = "Error: File " + txt_file + " in the wrong format.\n"
error_msg += " Expected: <class_name> <confidence> <left> <top> <right> <bottom>\n"
error_msg += " Received: " + line
error(error_msg)
if tmp_class_name == class_name:
#print("match")
bbox = left + " " + top + " " + right + " " +bottom
bounding_boxes.append({"confidence":confidence, "file_id":file_id, "bbox":bbox})
#print(bounding_boxes)
# sort detection-results by decreasing confidence
bounding_boxes.sort(key=lambda x:float(x['confidence']), reverse=True)
with open(TEMP_FILES_PATH + "/" + class_name + "_dr.json", 'w') as outfile:
json.dump(bounding_boxes, outfile)
"""
Calculate the AP for each class
"""
sum_AP = 0.0
ap_dictionary = {}
lamr_dictionary = {}
# open file to store the output
with open(output_files_path + "/output.txt", 'w') as output_file:
output_file.write("# AP and precision/recall per class\n")
count_true_positives = {}
for class_index, class_name in enumerate(gt_classes):
count_true_positives[class_name] = 0
"""
Load detection-results of that class
"""
dr_file = TEMP_FILES_PATH + "/" + class_name + "_dr.json"
dr_data = json.load(open(dr_file))
"""
Assign detection-results to ground-truth objects
"""
nd = len(dr_data)
tp = [0] * nd # creates an array of zeros of size nd
fp = [0] * nd
for idx, detection in enumerate(dr_data):
file_id = detection["file_id"]
if show_animation:
# find ground truth image
ground_truth_img = glob.glob1(IMG_PATH, file_id + ".*")
#tifCounter = len(glob.glob1(myPath,"*.tif"))
if len(ground_truth_img) == 0:
error("Error. Image not found with id: " + file_id)
elif len(ground_truth_img) > 1:
error("Error. Multiple image with id: " + file_id)
else: # found image
#print(IMG_PATH + "/" + ground_truth_img[0])
# Load image
img = cv2.imread(IMG_PATH + "/" + ground_truth_img[0])
# load image with draws of multiple detections
img_cumulative_path = output_files_path + "/images/" + ground_truth_img[0]
if os.path.isfile(img_cumulative_path):
img_cumulative = cv2.imread(img_cumulative_path)
else:
img_cumulative = img.copy()
# Add bottom border to image
bottom_border = 60
BLACK = [0, 0, 0]
img = cv2.copyMakeBorder(img, 0, bottom_border, 0, 0, cv2.BORDER_CONSTANT, value=BLACK)
# assign detection-results to ground truth object if any
# open ground-truth with that file_id
gt_file = TEMP_FILES_PATH + "/" + file_id + "_ground_truth.json"
ground_truth_data = json.load(open(gt_file))
ovmax = -1
gt_match = -1
# load detected object bounding-box
bb = [ float(x) for x in detection["bbox"].split() ]
for obj in ground_truth_data:
# look for a class_name match
if obj["class_name"] == class_name:
bbgt = [ float(x) for x in obj["bbox"].split() ]
bi = [max(bb[0],bbgt[0]), max(bb[1],bbgt[1]), min(bb[2],bbgt[2]), min(bb[3],bbgt[3])]
iw = bi[2] - bi[0] + 1
ih = bi[3] - bi[1] + 1
if iw > 0 and ih > 0:
# compute overlap (IoU) = area of intersection / area of union
ua = (bb[2] - bb[0] + 1) * (bb[3] - bb[1] + 1) + (bbgt[2] - bbgt[0]
+ 1) * (bbgt[3] - bbgt[1] + 1) - iw * ih
ov = iw * ih / ua
if ov > ovmax:
ovmax = ov
gt_match = obj
# assign detection as true positive/don't care/false positive
if show_animation:
status = "NO MATCH FOUND!" # status is only used in the animation
# set minimum overlap
min_overlap = MINOVERLAP
if specific_iou_flagged:
if class_name in specific_iou_classes:
index = specific_iou_classes.index(class_name)
min_overlap = float(iou_list[index])
if ovmax >= min_overlap:
if "difficult" not in gt_match:
if not bool(gt_match["used"]):
# true positive
tp[idx] = 1
gt_match["used"] = True
count_true_positives[class_name] += 1
# update the ".json" file
with open(gt_file, 'w') as f:
f.write(json.dumps(ground_truth_data))
if show_animation:
status = "MATCH!"
else:
# false positive (multiple detection)
fp[idx] = 1
if show_animation:
status = "REPEATED MATCH!"
else:
# false positive
fp[idx] = 1
if ovmax > 0:
status = "INSUFFICIENT OVERLAP"
"""
Draw image to show animation
"""
if show_animation:
height, widht = img.shape[:2]
# colors (OpenCV works with BGR)
white = (255,255,255)
light_blue = (255,200,100)
green = (0,255,0)
light_red = (30,30,255)
# 1st line
margin = 10
v_pos = int(height - margin - (bottom_border / 2.0))
text = "Image: " + ground_truth_img[0] + " "
img, line_width = draw_text_in_image(img, text, (margin, v_pos), white, 0)
text = "Class [" + str(class_index) + "/" + str(n_classes) + "]: " + class_name + " "
img, line_width = draw_text_in_image(img, text, (margin + line_width, v_pos), light_blue, line_width)
if ovmax != -1:
color = light_red
if status == "INSUFFICIENT OVERLAP":
text = "IoU: {0:.2f}% ".format(ovmax*100) + "< {0:.2f}% ".format(min_overlap*100)
else:
text = "IoU: {0:.2f}% ".format(ovmax*100) + ">= {0:.2f}% ".format(min_overlap*100)
color = green
img, _ = draw_text_in_image(img, text, (margin + line_width, v_pos), color, line_width)
# 2nd line
v_pos += int(bottom_border / 2.0)
rank_pos = str(idx+1) # rank position (idx starts at 0)
text = "Detection #rank: " + rank_pos + " confidence: {0:.2f}% ".format(float(detection["confidence"])*100)
img, line_width = draw_text_in_image(img, text, (margin, v_pos), white, 0)
color = light_red
if status == "MATCH!":
color = green
text = "Result: " + status + " "
img, line_width = draw_text_in_image(img, text, (margin + line_width, v_pos), color, line_width)
font = cv2.FONT_HERSHEY_SIMPLEX
if ovmax > 0: # if there is intersections between the bounding-boxes
bbgt = [ int(round(float(x))) for x in gt_match["bbox"].split() ]
cv2.rectangle(img,(bbgt[0],bbgt[1]),(bbgt[2],bbgt[3]),light_blue,2)
cv2.rectangle(img_cumulative,(bbgt[0],bbgt[1]),(bbgt[2],bbgt[3]),light_blue,2)
cv2.putText(img_cumulative, class_name, (bbgt[0],bbgt[1] - 5), font, 0.6, light_blue, 1, cv2.LINE_AA)
bb = [int(i) for i in bb]
cv2.rectangle(img,(bb[0],bb[1]),(bb[2],bb[3]),color,2)
cv2.rectangle(img_cumulative,(bb[0],bb[1]),(bb[2],bb[3]),color,2)
cv2.putText(img_cumulative, class_name, (bb[0],bb[1] - 5), font, 0.6, color, 1, cv2.LINE_AA)
# show image
cv2.imshow("Animation", img)
cv2.waitKey(20) # show for 20 ms
# save image to output
output_img_path = output_files_path + "/images/detections_one_by_one/" + class_name + "_detection" + str(idx) + ".jpg"
cv2.imwrite(output_img_path, img)
# save the image with all the objects drawn to it
cv2.imwrite(img_cumulative_path, img_cumulative)
#print(tp)
# compute precision/recall
cumsum = 0
for idx, val in enumerate(fp):
fp[idx] += cumsum
cumsum += val
cumsum = 0
for idx, val in enumerate(tp):
tp[idx] += cumsum
cumsum += val
#print(tp)
rec = tp[:]
for idx, val in enumerate(tp):
rec[idx] = float(tp[idx]) / gt_counter_per_class[class_name]
#print(rec)
prec = tp[:]
for idx, val in enumerate(tp):
prec[idx] = float(tp[idx]) / (fp[idx] + tp[idx])
#print(prec)
ap, mrec, mprec = voc_ap(rec[:], prec[:])
sum_AP += ap
text = "{0:.2f}%".format(ap*100) + " = " + class_name + " AP " #class_name + " AP = {0:.2f}%".format(ap*100)
"""
Write to output.txt
"""
rounded_prec = [ '%.2f' % elem for elem in prec ]
rounded_rec = [ '%.2f' % elem for elem in rec ]
output_file.write(text + "\n Precision: " + str(rounded_prec) + "\n Recall :" + str(rounded_rec) + "\n\n")
if not args.quiet:
print(text)
ap_dictionary[class_name] = ap
n_images = counter_images_per_class[class_name]
lamr, mr, fppi = log_average_miss_rate(np.array(prec), np.array(rec), n_images)
lamr_dictionary[class_name] = lamr
"""
Draw plot
"""
if draw_plot:
plt.plot(rec, prec, '-o')
# add a new penultimate point to the list (mrec[-2], 0.0)
# since the last line segment (and respective area) do not affect the AP value
area_under_curve_x = mrec[:-1] + [mrec[-2]] + [mrec[-1]]
area_under_curve_y = mprec[:-1] + [0.0] + [mprec[-1]]
plt.fill_between(area_under_curve_x, 0, area_under_curve_y, alpha=0.2, edgecolor='r')
# set window title
fig = plt.gcf() # gcf - get current figure
fig.canvas.manager.set_window_title('AP ' + class_name)
# set plot title
plt.title('class: ' + text)
#plt.suptitle('This is a somewhat long figure title', fontsize=16)
# set axis titles
plt.xlabel('Recall')
plt.ylabel('Precision')
# optional - set axes
axes = plt.gca() # gca - get current axes
axes.set_xlim([0.0,1.0])
axes.set_ylim([0.0,1.05]) # .05 to give some extra space
# Alternative option -> wait for button to be pressed
#while not plt.waitforbuttonpress(): pass # wait for key display
# Alternative option -> normal display
#plt.show()
# save the plot
fig.savefig(output_files_path + "/classes/" + class_name + ".png")
plt.cla() # clear axes for next plot
if show_animation:
cv2.destroyAllWindows()
output_file.write("\n# mAP of all classes\n")
mAP = sum_AP / n_classes
text = "mAP = {0:.2f}%".format(mAP*100)
output_file.write(text + "\n")
print(text)
"""
Draw false negatives
"""
if show_animation:
pink = (203,192,255)
for tmp_file in gt_files:
ground_truth_data = json.load(open(tmp_file))
#print(ground_truth_data)
# get name of corresponding image
start = TEMP_FILES_PATH + '/'
img_id = tmp_file[tmp_file.find(start)+len(start):tmp_file.rfind('_ground_truth.json')]
img_cumulative_path = output_files_path + "/images/" + img_id + ".jpg"
img = cv2.imread(img_cumulative_path)
if img is None:
img_path = IMG_PATH + '/' + img_id + ".jpg"
img = cv2.imread(img_path)
# draw false negatives
for obj in ground_truth_data:
if not obj['used']:
bbgt = [ int(round(float(x))) for x in obj["bbox"].split() ]
cv2.rectangle(img,(bbgt[0],bbgt[1]),(bbgt[2],bbgt[3]),pink,2)
cv2.imwrite(img_cumulative_path, img)
# remove the temp_files directory
shutil.rmtree(TEMP_FILES_PATH)
"""
Count total of detection-results
"""
# iterate through all the files
det_counter_per_class = {}
for txt_file in dr_files_list:
# get lines to list
lines_list = file_lines_to_list(txt_file)
for line in lines_list:
class_name = line.split()[0]
# check if class is in the ignore list, if yes skip
if class_name in args.ignore:
continue
# count that object
if class_name in det_counter_per_class:
det_counter_per_class[class_name] += 1
else:
# if class didn't exist yet
det_counter_per_class[class_name] = 1
#print(det_counter_per_class)
dr_classes = list(det_counter_per_class.keys())
"""
Plot the total number of occurences of each class in the ground-truth
"""
if draw_plot:
window_title = "ground-truth-info"
plot_title = "ground-truth\n"
plot_title += "(" + str(len(ground_truth_files_list)) + " files and " + str(n_classes) + " classes)"
x_label = "Number of objects per class"
output_path = output_files_path + "/ground-truth-info.png"
to_show = False
plot_color = 'forestgreen'
draw_plot_func(
gt_counter_per_class,
n_classes,
window_title,
plot_title,
x_label,
output_path,
to_show,
plot_color,
'',
)
"""
Write number of ground-truth objects per class to results.txt
"""
with open(output_files_path + "/output.txt", 'a') as output_file:
output_file.write("\n# Number of ground-truth objects per class\n")
for class_name in sorted(gt_counter_per_class):
output_file.write(class_name + ": " + str(gt_counter_per_class[class_name]) + "\n")
"""
Finish counting true positives
"""
for class_name in dr_classes:
# if class exists in detection-result but not in ground-truth then there are no true positives in that class
if class_name not in gt_classes:
count_true_positives[class_name] = 0
#print(count_true_positives)
"""
Plot the total number of occurences of each class in the "detection-results" folder
"""
if draw_plot:
window_title = "detection-results-info"
# Plot title
plot_title = "detection-results\n"
plot_title += "(" + str(len(dr_files_list)) + " files and "
count_non_zero_values_in_dictionary = sum(int(x) > 0 for x in list(det_counter_per_class.values()))
plot_title += str(count_non_zero_values_in_dictionary) + " detected classes)"
# end Plot title
x_label = "Number of objects per class"
output_path = output_files_path + "/detection-results-info.png"
to_show = False
plot_color = 'forestgreen'
true_p_bar = count_true_positives
draw_plot_func(
det_counter_per_class,
len(det_counter_per_class),
window_title,
plot_title,
x_label,
output_path,
to_show,
plot_color,
true_p_bar
)
"""
Write number of detected objects per class to output.txt
"""
with open(output_files_path + "/output.txt", 'a') as output_file:
output_file.write("\n# Number of detected objects per class\n")
for class_name in sorted(dr_classes):
n_det = det_counter_per_class[class_name]
text = class_name + ": " + str(n_det)
text += " (tp:" + str(count_true_positives[class_name]) + ""
text += ", fp:" + str(n_det - count_true_positives[class_name]) + ")\n"
output_file.write(text)
"""
Draw log-average miss rate plot (Show lamr of all classes in decreasing order)
"""
if draw_plot:
window_title = "lamr"
plot_title = "log-average miss rate"
x_label = "log-average miss rate"
output_path = output_files_path + "/lamr.png"
to_show = False
plot_color = 'royalblue'
draw_plot_func(
lamr_dictionary,
n_classes,
window_title,
plot_title,
x_label,
output_path,
to_show,
plot_color,
""
)
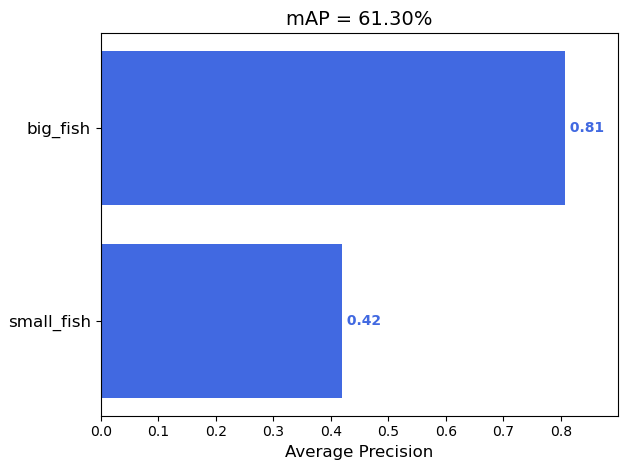
"""
Draw mAP plot (Show AP's of all classes in decreasing order)
"""
if draw_plot:
window_title = "mAP"
plot_title = "mAP = {0:.2f}%".format(mAP*100)
x_label = "Average Precision"
output_path = output_files_path + "/mAP.png"
to_show = True
plot_color = 'royalblue'
draw_plot_func(
ap_dictionary,
n_classes,
window_title,
plot_title,
x_label,
output_path,
to_show,
plot_color,
""
)

















 4818
4818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











