








基本思路.
- 设映射 F : D ⊂ R n → R n F:D⊂R^n→R^n F:D⊂Rn→Rn,考虑方程 F ( x ) = 0 F(x)=0 F(x)=0,求解思路是将其转化为等价形式 x = G ( x ) x=G(x) x=G(x),其中映射 G : D ⊂ R n → R n G:D⊂R^n→R^n G:D⊂Rn→Rn,称为不动点方程。若存在点 x ∗ ∈ D x^*∈D x∗∈D 使得 x ∗ = G ( x ∗ ) x^*=G(x^*) x∗=G(x∗) 成立,那么 x ∗ x^* x∗ 称为映射 G G G 的不动点,由等价性可知 x ∗ x^* x∗ 就是原方程 F ( x ) = 0 F(x)=0 F(x)=0 的解
- 于是求解方程 F ( x ) = 0 F(x)=0 F(x)=0 转化为求解映射 G ( x ) G(x) G(x) 的不动点,关键在于判断 G ( x ) G(x) G(x) 是否存在不动点以及如何求解该不动点。
- 【不动点原理】是用于判断映射 G G G 在定义域 D D D 上是否存在不动点的理论。
压缩映射.
- 考虑连续映射 G : D ⊂ R n → R n G:D⊂R^n→R^n G:D⊂Rn→Rn,对于 ∀ x , y ∈ D ∀x,y∈D ∀x,y∈D,恒有 ∣ ∣ G ( x ) − G ( y ) ∣ ∣ ≤ α ∣ ∣ x − y ∣ ∣ ||G(x)-G(y)||≤\alpha||x-y|| ∣∣G(x)−G(y)∣∣≤α∣∣x−y∣∣ 成立。
- 当 α ∈ ( 0 , 1 ) \alpha∈(0,1) α∈(0,1) 时, G ( x ) G(x) G(x) 是 D D D 上的压缩映射;另外 α = 1 \alpha=1 α=1 时, G ( x ) G(x) G(x) 是 D D D 上的非膨胀映射。
- 【定理一】对于压缩映射 G : R n → R n G:R^n→R^n G:Rn→Rn 而言, G G G 在 R n R^n Rn 中有唯一的不动点。
- 【证明】任取 x 0 ∈ R n x_0∈R^n x0∈Rn,构造点列 x k + 1 = G ( x k ) , k = 0 , 1 , 2... x_{k+1}=G(x_k),k=0,1,2... xk+1=G(xk),k=0,1,2...,由于 G G G 是压缩映射,那么有 ∣ ∣ x k + 1 − x k ∣ ∣ = ∣ ∣ G ( x k ) − G ( x k − 1 ) ∣ ∣ ≤ α ∣ ∣ x k − x k − 1 ∣ ∣ ≤ . . . ≤ α k ∣ ∣ x 1 − x 0 ∣ ∣ ||x_{k+1}-x_k||=||G(x_k)-G(x_{k-1})||≤\alpha||x_k-x_{k-1}||≤...≤\alpha^k||x_1-x_0|| ∣∣xk+1−xk∣∣=∣∣G(xk)−G(xk−1)∣∣≤α∣∣xk−xk−1∣∣≤...≤αk∣∣x1−x0∣∣.
- 根据三角不等式可知 ∣ ∣ x k + p − x k ∣ ∣ = ∣ ∣ ( x k + p − x ) + ( x − x k ) ∣ ∣ ≤ ∣ ∣ x k + p − x ∣ ∣ + ∣ ∣ x − x k ∣ ∣ ||x_{k+p}-x_k||=||(x_{k+p}-x)+(x-x_k)||≤||x_{k+p}-x||+||x-x_k|| ∣∣xk+p−xk∣∣=∣∣(xk+p−x)+(x−xk)∣∣≤∣∣xk+p−x∣∣+∣∣x−xk∣∣,因此 ∣ ∣ x k + p − x k ∣ ∣ ≤ ∣ ∣ x k + p − x k + p − 1 ∣ ∣ + ∣ ∣ x k + p − 1 − x k + p − 2 ∣ ∣ + . . . + ∣ ∣ x k + 1 − x k ∣ ∣ ≤ ( α k + p − 1 + α k + p − 2 + . . . + α k ) ∣ ∣ x 1 − x 0 ∣ ∣ = α k ( 1 − α p ) 1 − α ∣ ∣ x 1 − x 0 ∣ ∣ ||x_{k+p}-x_k||≤||x_{k+p}-x_{k+p-1}||+||x_{k+p-1}-x_{k+p-2}||+...+||x_{k+1}-x_k||≤(\alpha^{k+p-1}+\alpha^{k+p-2}+...+\alpha^k)||x_1-x_0||=\frac{\alpha^k(1-\alpha^p)}{1-\alpha}||x_1-x_0|| ∣∣xk+p−xk∣∣≤∣∣xk+p−xk+p−1∣∣+∣∣xk+p−1−xk+p−2∣∣+...+∣∣xk+1−xk∣∣≤(αk+p−1+αk+p−2+...+αk)∣∣x1−x0∣∣=1−ααk(1−αp)∣∣x1−x0∣∣,由于 α ∈ ( 0 , 1 ) \alpha∈(0,1) α∈(0,1) ,所以 k → ∞ k→∞ k→∞ 时 ∣ ∣ x k + p − x k ∣ ∣ → 0 ||x_{k+p}-x_k||→0 ∣∣xk+p−xk∣∣→0,因此 x k {x_k} xk 是柯西序列。
- 因为 R n R^n Rn 是完备的赋范线性空间,因此 x k x_k xk 的极限 x ∗ ∈ R n x^*∈R^n x∗∈Rn,又因为 G G G 是连续映射,所以有 x ∗ = l i m k → ∞ ( x k + 1 ) = l i m k → ∞ [ G ( x k ) ] = l i m x → x ∗ G ( x ) = G ( x ∗ ) x^*=lim_{k→∞}(x_{k+1})=lim_{k→∞}[G(x_k)]=lim_{x→x^*}G(x)=G(x^*) x∗=limk→∞(xk+1)=limk→∞[G(xk)]=limx→x∗G(x)=G(x∗),于是 G G G 的不动点存在性证明完成。
- 关于唯一性,假设还有另外一不动点满足 y ∗ = G ( y ∗ ) y^*=G(y^*) y∗=G(y∗),所以有 ∣ ∣ x ∗ − y ∗ ∣ ∣ = ∣ ∣ G ( x ∗ ) − G ( y ∗ ) ∣ ∣ ≤ α ∣ ∣ x ∗ − y ∗ ∣ ∣ , α ∈ ( 0 , 1 ) ||x^*-y^*||=||G(x^*)-G(y^*)||≤\alpha||x^*-y^*||,\alpha∈(0,1) ∣∣x∗−y∗∣∣=∣∣G(x∗)−G(y∗)∣∣≤α∣∣x∗−y∗∣∣,α∈(0,1),显然只有 ∣ ∣ x ∗ − y ∗ ∣ ∣ ≡ 0 ||x^*-y^*||≡0 ∣∣x∗−y∗∣∣≡0 满足上式,根据范数正定性可知 x ∗ ≡ y ∗ x^*≡y^* x∗≡y∗,是同一个不动点。
- 上述定理的条件过于苛刻,要求 G G G 在整个 R n R^n Rn 上为压缩映射,考虑将条件放松,简单地判断不动点是否存在。
预备概念.
- 仅出于理解概念简述,非严格定义。
有界集.
- 指那些可以被有界区间包含的实数集,通俗来说就是可以被长度有限区间包含的集合,例如区间 [ 2 , 5 ] [2,5] [2,5].
- 若 ∃ k ∃k ∃k 使得对 ∀ s ∈ S ∀s∈S ∀s∈S 都有 s ≤ k s≤k s≤k,那么 k k k 称为集合 S S S 的上界,类似地可以定义下界。
- 具有上下界的集合 S S S 称为有界集。
闭集.
- 如果一个集合不含边界点或没有边界点,那么它称为开集,例如区间 ( 2 , 5 ) (2,5) (2,5).
- 补集为开集的集合是闭集,例如区间 [ 2 , 5 ] [2,5] [2,5],其实数域补集为 ( − ∞ , 2 ) ∪ ( 5 , + ∞ ) (-∞,2)∪(5,+∞) (−∞,2)∪(5,+∞).
凸集.
- 以二维平面直观来看,凸集是一个具有这样性质的集合:集合中任意两点之间的连线都在集合内。
- 使用数学语言表述为 ∀ x , y ∈ S , t ∈ ( 0 , 1 ) ∀x,y∈S,t∈(0,1) ∀x,y∈S,t∈(0,1),都有 t x + ( 1 − t ) y ∈ S tx+(1-t)y∈S tx+(1−t)y∈S 成立。
Brouwer不动点定理.
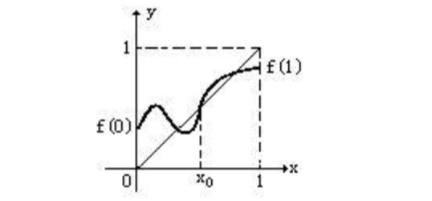
- 设映射 G : D ⊂ R n → R n G:D⊂R^n→R^n G:D⊂Rn→Rn 在有界闭凸集 D D D 上连续,且 G ( D ) ⊂ D G(D)⊂D G(D)⊂D,那么 G G G 在 D D D 中必然存在至少一个不动点。
- 从一维情况直观来看,取 D = [ a , b ] , G ( D ) = [ a , b ] ⊂ D . D=[a,b],G(D)=[a,b]⊂D. D=[a,b],G(D)=[a,b]⊂D.
- 假设不存在
x
∗
x^*
x∗ 满足
G
(
x
∗
)
=
x
∗
G(x^*)=x^*
G(x∗)=x∗,即在区间
[
a
,
b
]
[a,b]
[a,b] 上,函数
h
(
x
)
=
G
(
x
)
−
x
h(x)=G(x)-x
h(x)=G(x)−x 没有零点,所以
∀
x
∈
[
a
,
b
]
,
h
(
x
)
>
0
⋁
h
(
x
)
<
0
\forall x\in[a,b],h(x)>0\bigvee h(x)<0
∀x∈[a,b],h(x)>0⋁h(x)<0,否则根据函数连续性必然存在零点。以
h
(
x
)
>
0
h(x)>0
h(x)>0 为例,当
x
=
b
x=b
x=b 时,必然有
G
(
b
)
>
b
G(b)>b
G(b)>b,但
G
(
D
)
⊂
[
a
,
b
]
G(D)\subset[a,b]
G(D)⊂[a,b],因此
m
a
x
G
(
x
)
≤
b
maxG(x)≤b
maxG(x)≤b,矛盾出现;
h
(
x
)
<
0
h(x)<0
h(x)<0 情况类似,因而至少存在一个不动点
x
∗
x^*
x∗
一叨.
- 很多问题转化为不动点方程后,求解算法都是迭代法,例如比较熟悉的Hopcroft算法求解最简自动机,DV路由算法以及线性、非线性方程数值解的计算。
- 关于压缩映射的定义式: ∀ x , y ∈ D , 0 < α < 1 , ∣ ∣ G ( x ) − G ( y ) ∣ ∣ ≤ α ∣ ∣ x − y ∣ ∣ ∀x,y∈D,0<\alpha<1,||G(x)-G(y)||≤\alpha||x-y|| ∀x,y∈D,0<α<1,∣∣G(x)−G(y)∣∣≤α∣∣x−y∣∣由此想到Lipschitz条件,函数 f ( x ) f(x) f(x) 在 x 0 x_0 x0 的 δ \delta δ 邻域内的所有点都满足 ∃ L > 0 , ∀ x ∈ [ x 0 − δ , x 0 + δ ] , ∣ f ( x ) − f ( x 0 ) ∣ ≤ L ⋅ ∣ x − x 0 ∣ \exist~L>0,\forall x\in[x_0-\delta,x_0+\delta],|f(x)-f(x_0)|≤L·|x-x_0| ∃ L>0,∀x∈[x0−δ,x0+δ],∣f(x)−f(x0)∣≤L⋅∣x−x0∣则称函数 f ( x ) f(x) f(x)在 x 0 x_0 x0 满足李普希茨条件。
- 由此引申出的概念有李普希茨连续映射:设函数 f : D ⊂ X → Y f:D\subset X\rightarrow Y f:D⊂X→Y,若有正常数 L L L 使得 ∀ x , y ∈ D \forall x,y\in D ∀x,y∈D ∣ ∣ f ( x ) − f ( y ) ∣ ∣ ≤ L ⋅ ∣ ∣ x − y ∣ ∣ ||f(x)-f(y)||≤L·||x-y|| ∣∣f(x)−f(y)∣∣≤L⋅∣∣x−y∣∣则称上述映射 f f f 为李普希茨连续映射,显然压缩映射必然是Lipschitz连续映射,是 L < 1 L<1 L<1 时的特殊情况。

















 1614
1614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









