







1、相机标定的意义
在机器视觉领域,相机的标定是一个关键的环节,它决定了机器视觉系统能否有效的定位,能否有效的计算目标物。每个镜头的在生产和组装过程中的畸变程度各不相同,通过相机标定可以校正这种镜头畸变,生成矫正后的图像——矫正透镜畸变;相机的标定基本上可以分为两种,第一种是相机的自标定;第二种是依赖于标定参照物的标定方法。前者是相机拍摄周围物体,通过数字图像处理的方法和相关的几何计算得到相机参数,但是这种方法标定的结果误差较大,不适合于高精度应用场合。后者是通过标定参照物,由相机成像,并通过数字图像处理的方法,以及后期的空间算术运算计算相机的内参和外参。
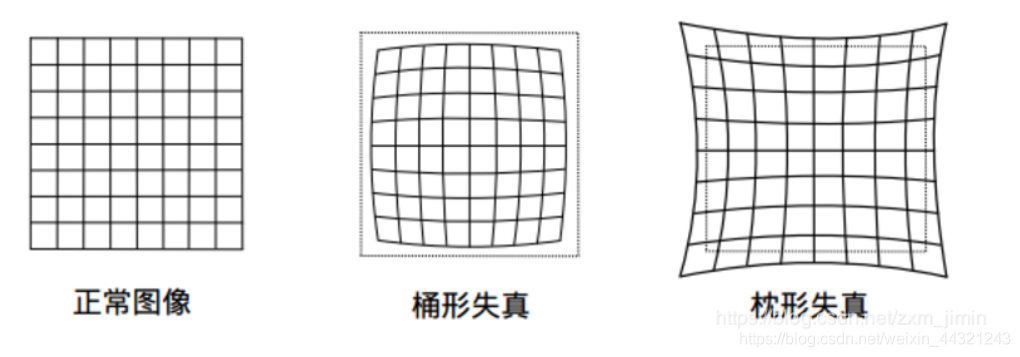
相机在出厂之前都需要进行相机标定,用软件的方法校正生成的图像,避免拍摄出的图像产生桶形和枕形畸变;
2.相机内参矩阵原理
详见 https://www.cnblogs.com/Jessica-jie/p/6596450.html
摄像机模型
Pinhole Camera模型如下图所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8807
8807











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









