






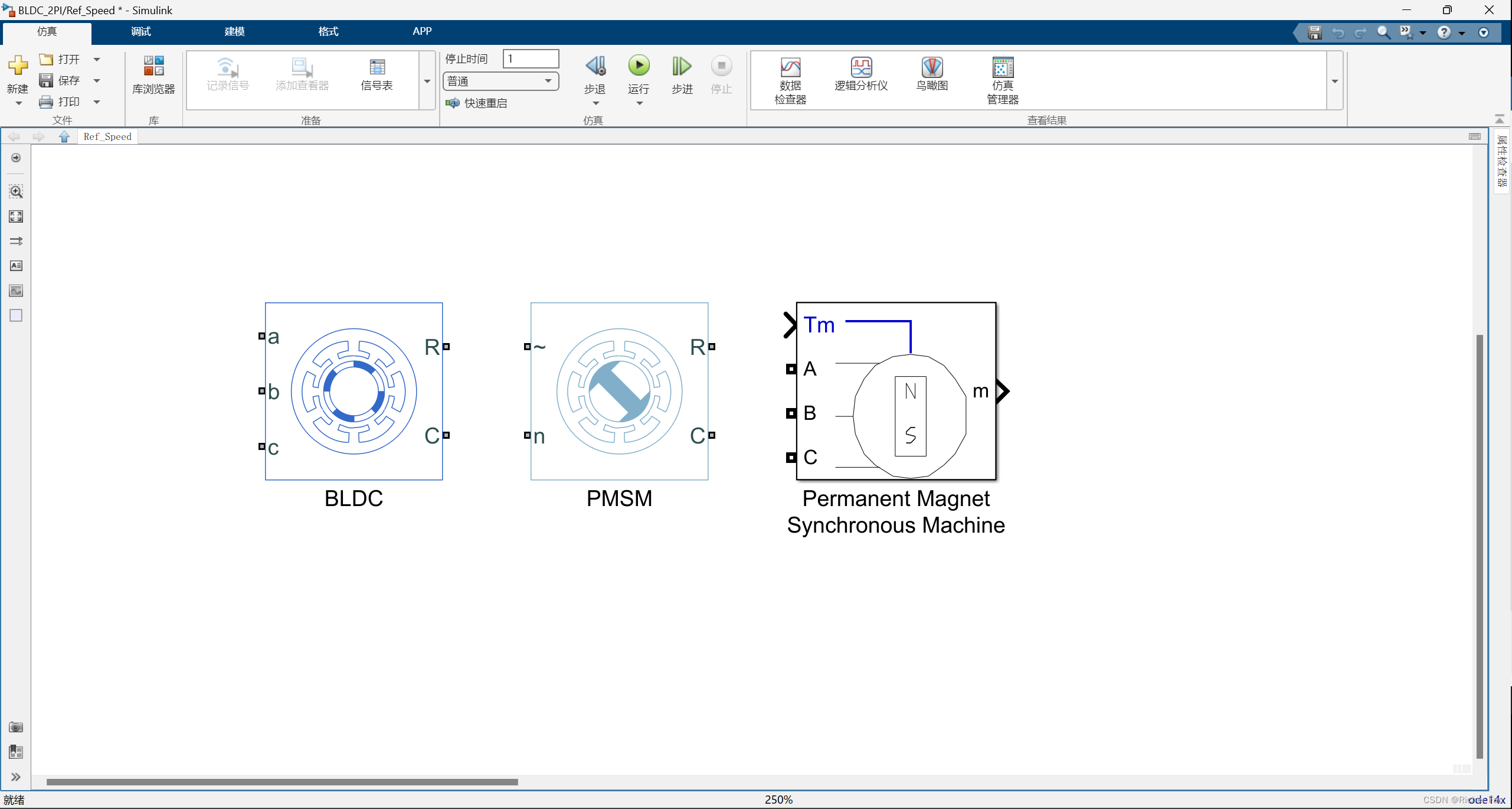
MATLAB2019后simulink新加了库simscape物理仿真库,有单独的BLDC模型和PMSM模型,可以替代之前的电气库中Permanent Magnet Synchronous Machine。
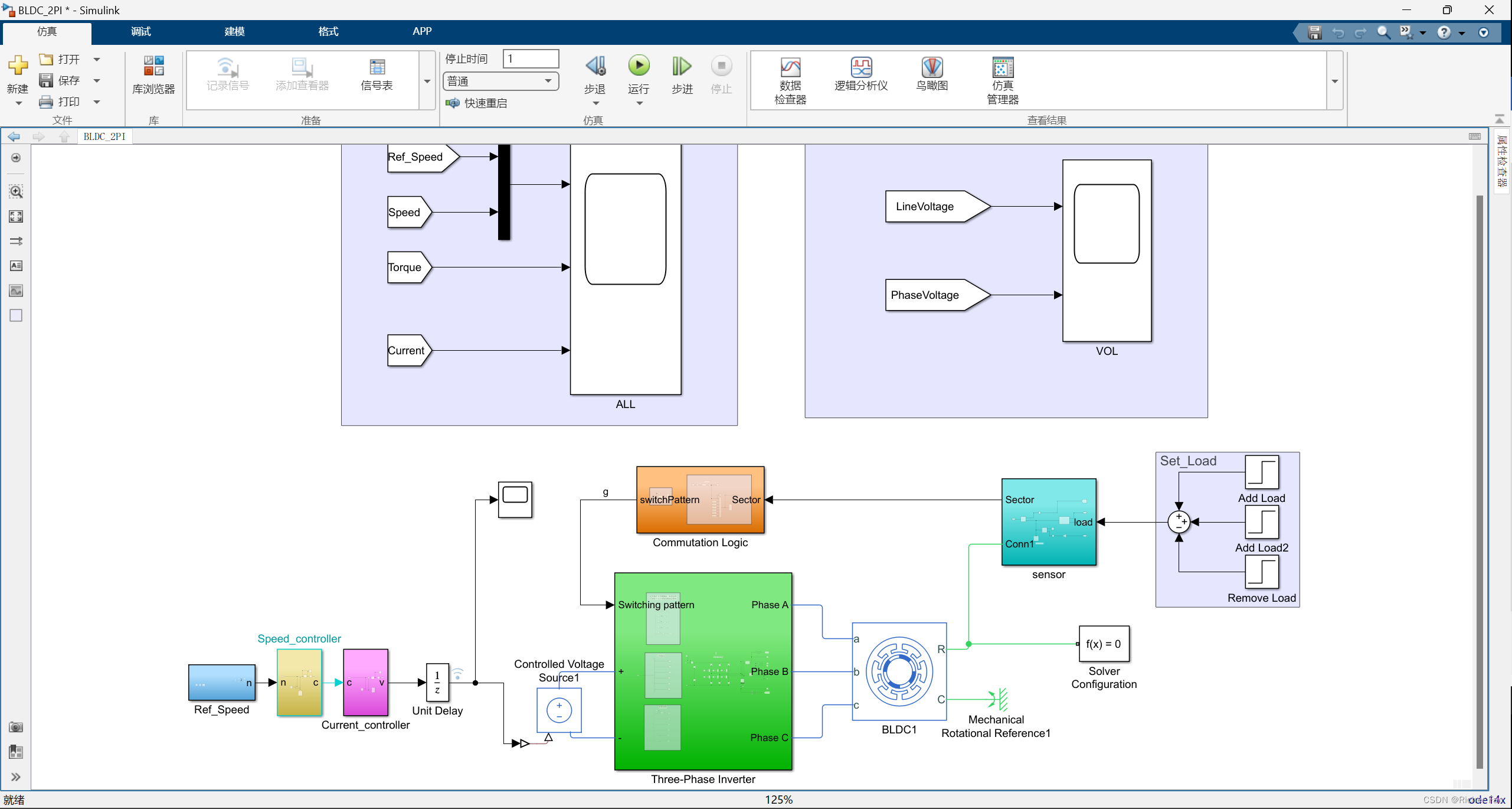
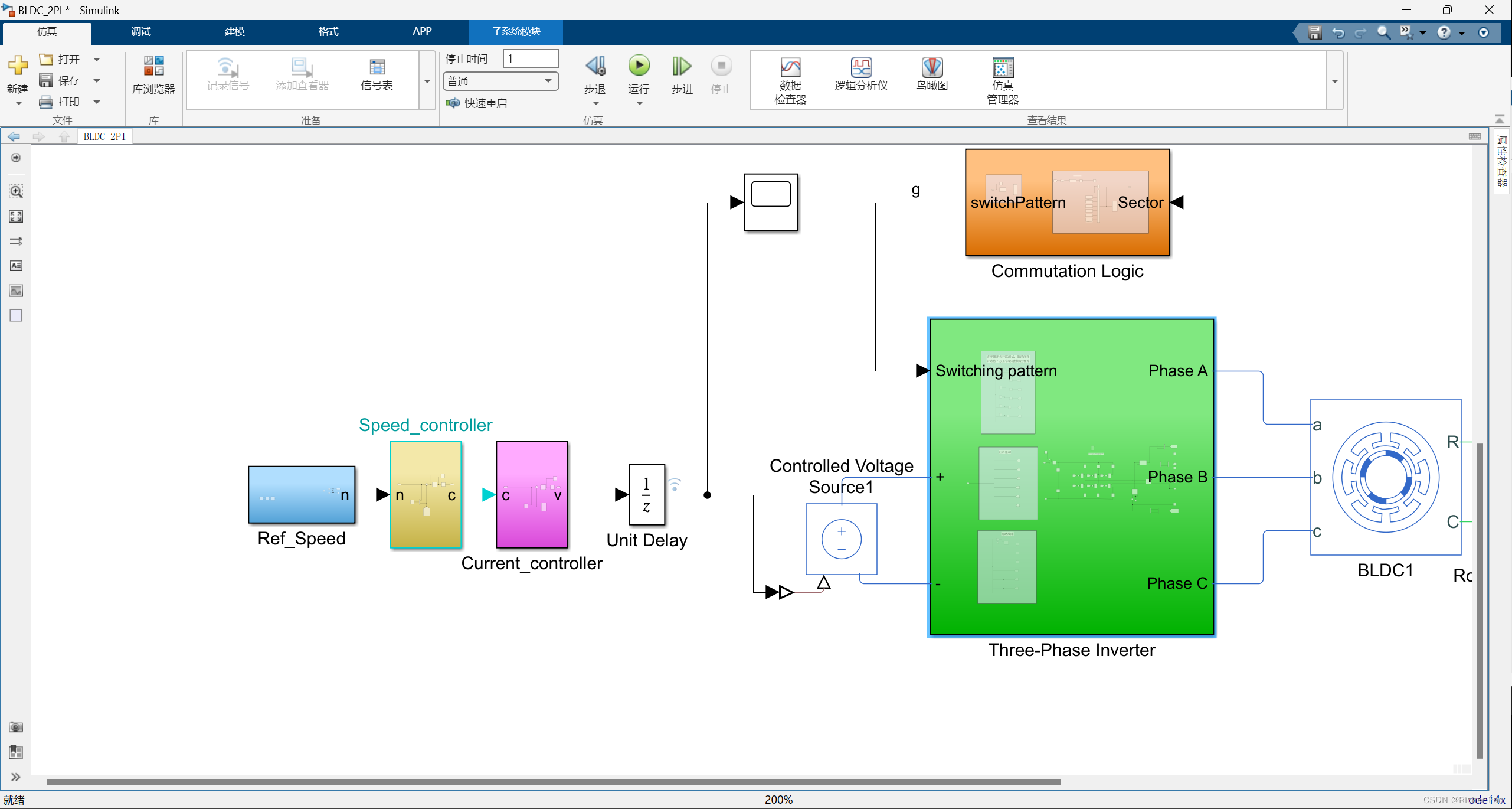
基于Simscape的无刷直流电机BLDC物理模型,这里搭建了BLDC速度电流双闭环模型,由于PI参数没有仔细调整,目前电流波形还不是很好
下面讲解下整个基本原理和步骤
1、电机本体:
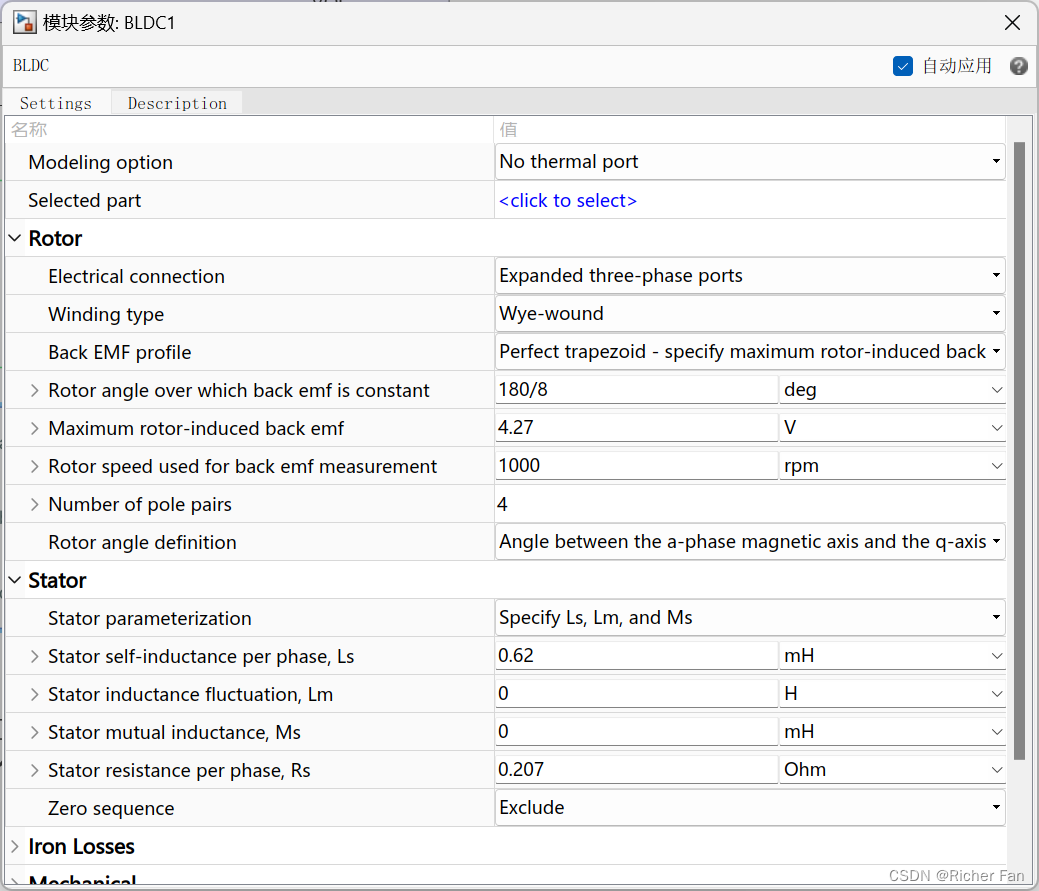
电机本体参数的设置可以右击查看帮助,了解参数的设置,其中主要需要修改这些参数,定子部分和转子部分
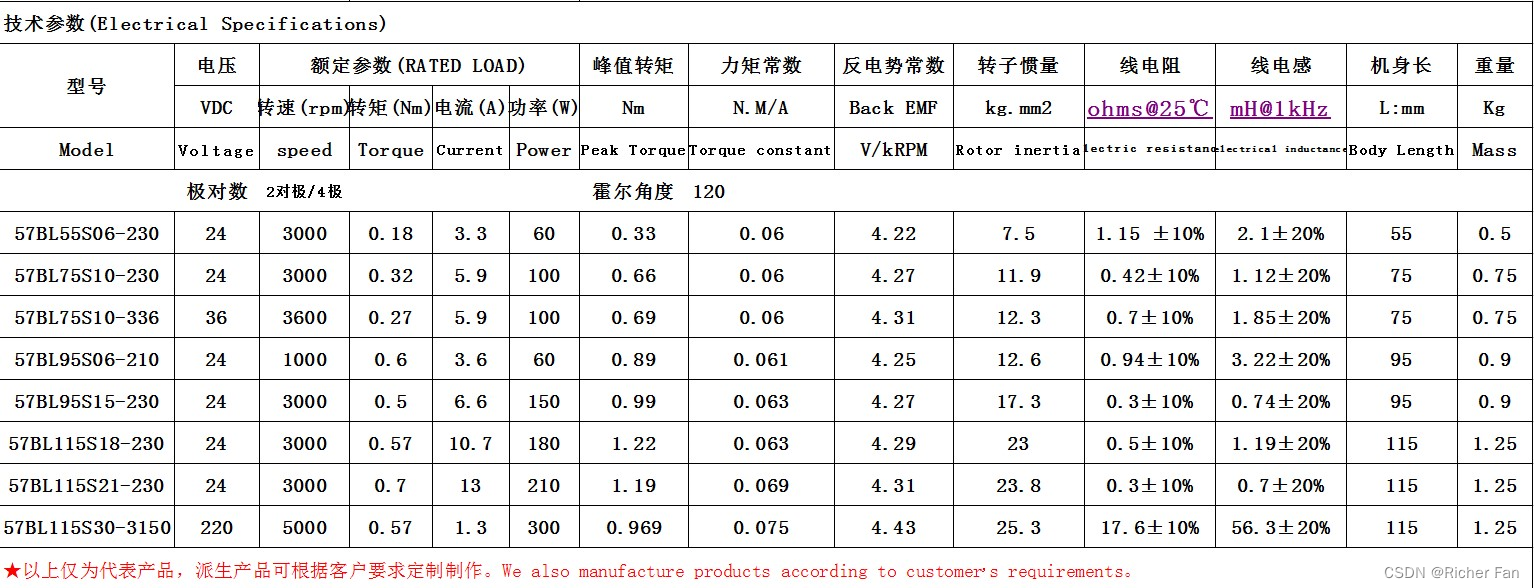
定子主要是星型还是三角形连接,一般是星型。反电动势类型,可以选择最大磁链,也可以选择单位反电动势电压和反电动势常数,这里常见选用转矩常数和单位反电动势电压,例如下表给出的0.06N·m/和A4.27V/krpm。转子重叠角度一般为90°除以极对数。
定子主要是相电阻和想电感,这里要注意是想到每一相的电感和电阻,一般电机参数给的线电感和线电阻,因此需要除以2.
一般实际电机生产商会提供电机以下参数
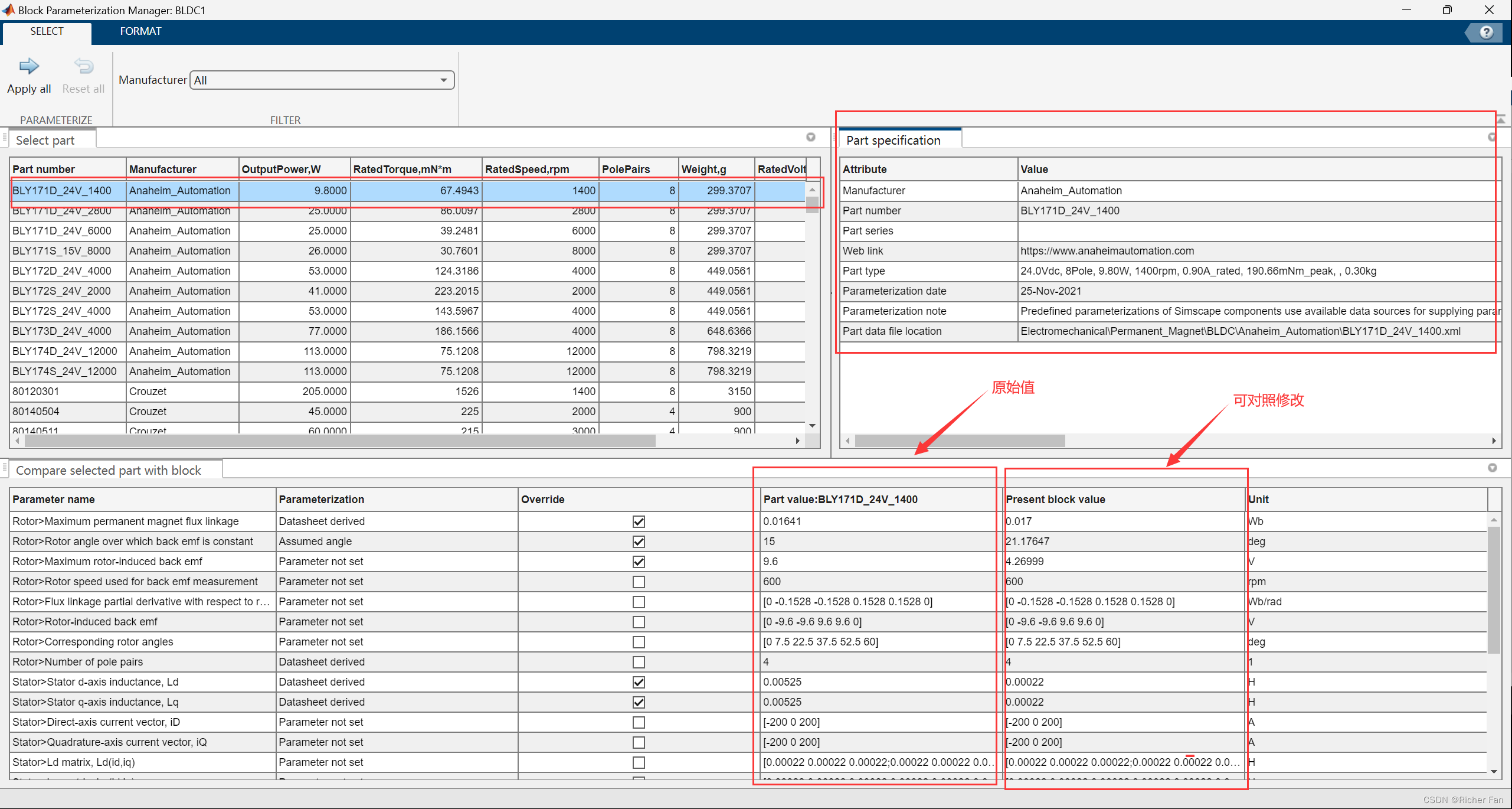
另外选择模块解释中有不同电机生产厂家提供的电机参数
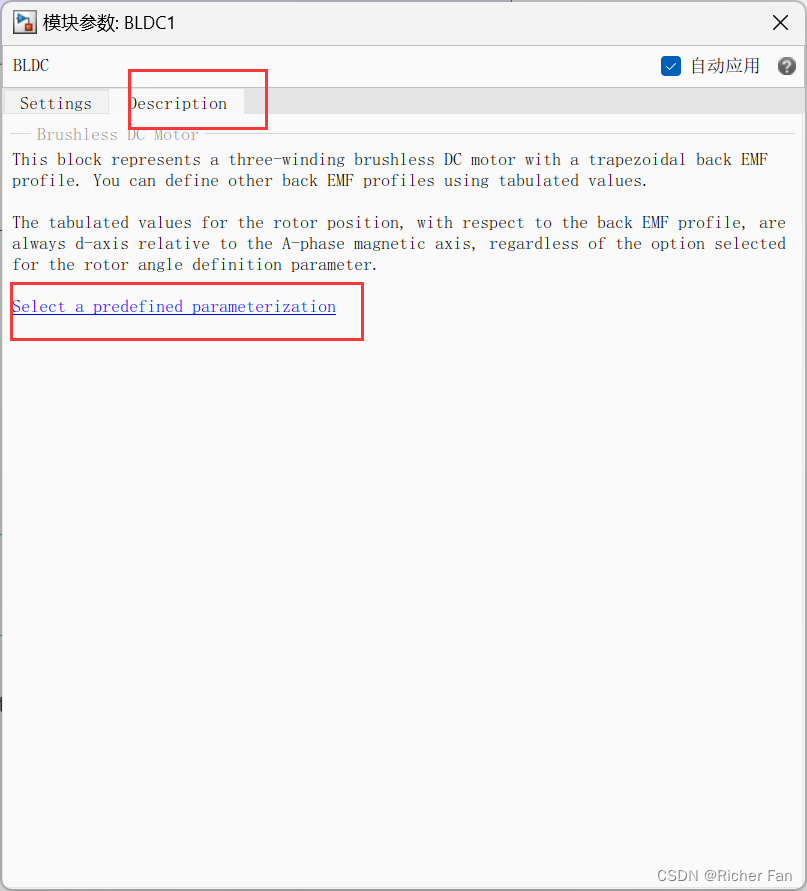
可以对照符合自己想要设置电机参数进行对照修改或者直接选用
2.电机传感器
该BLDC模型不提供常见的输出端口输出信号,例如转矩,速度,转子角度,反电动势,定子电流等信号,只提供位置参考信号端口C和旋转端口R.一般位置参考选择物理机械参考,旋转端口接相应的传感器。
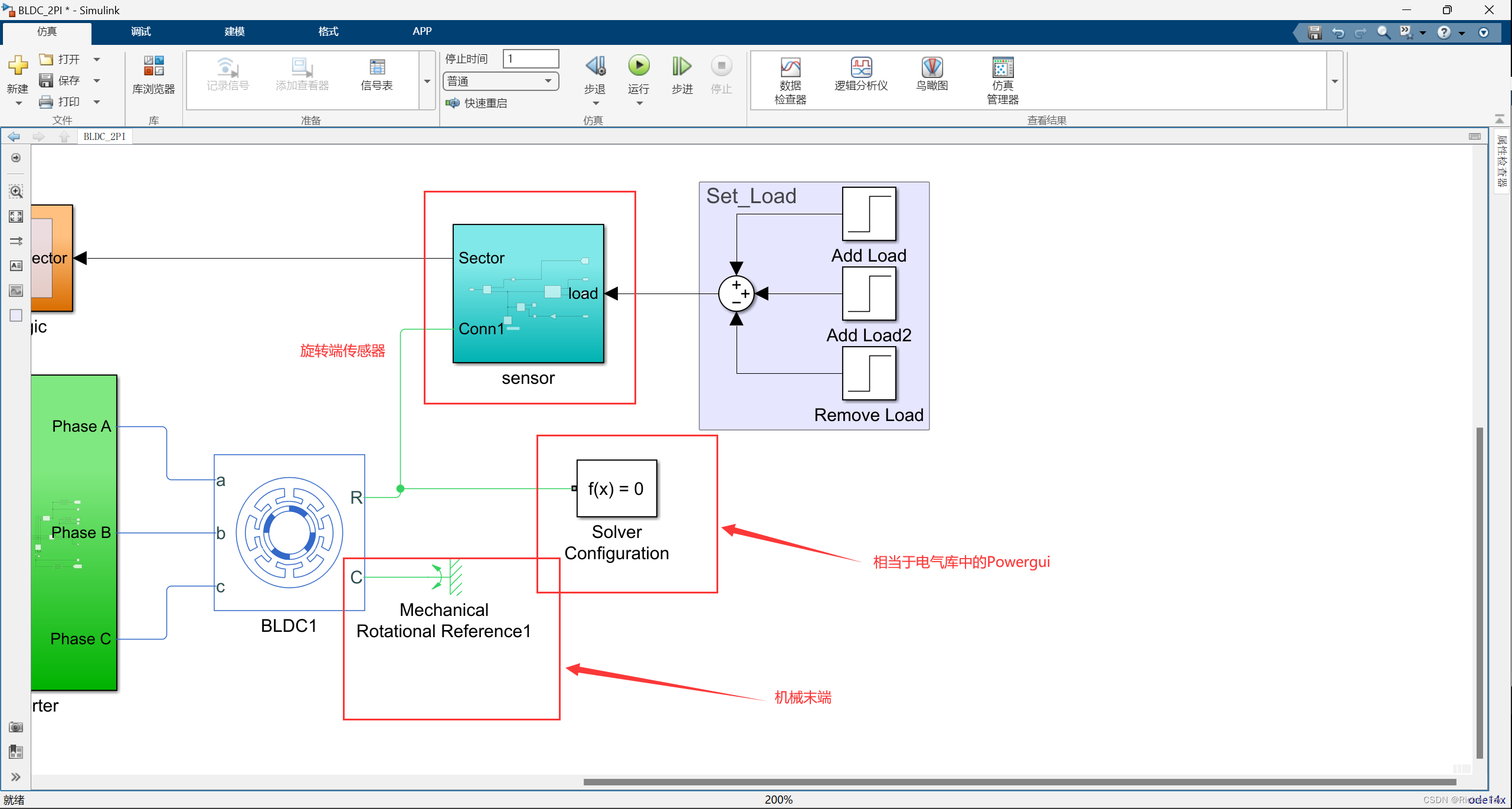
一般需要从电机物理旋转端获取位置信号,转矩信号等,传感器信号需要通过PS-Simulink模块转换。同理simulink信号转化为物理也要用到simulink-ps模块转换。另外转动惯量信号也需要接在转矩传感器后面,转动惯量影响启动快慢和空载电流的大小。
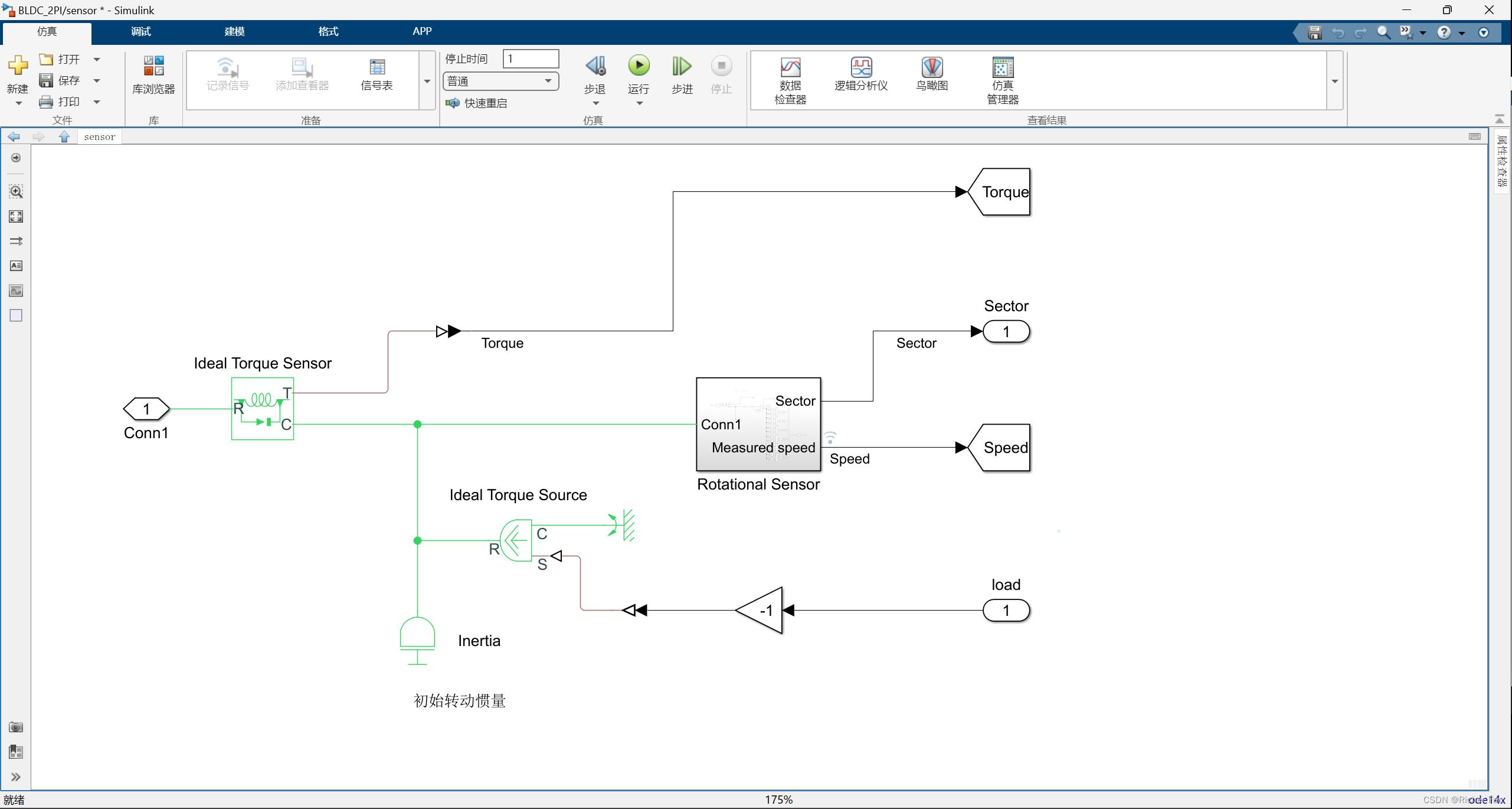
从simscape库中,可以选择专门的转矩传感器和转矩资源来测量转矩和加负载,由于电磁转矩的方向和负载的力矩方向总是相反的,所以负载信号需要乘以-1.
通过理想旋转传感器可以测量旋转角速度和位移,根据位置信号换算,从而获得霍尔信号和速度
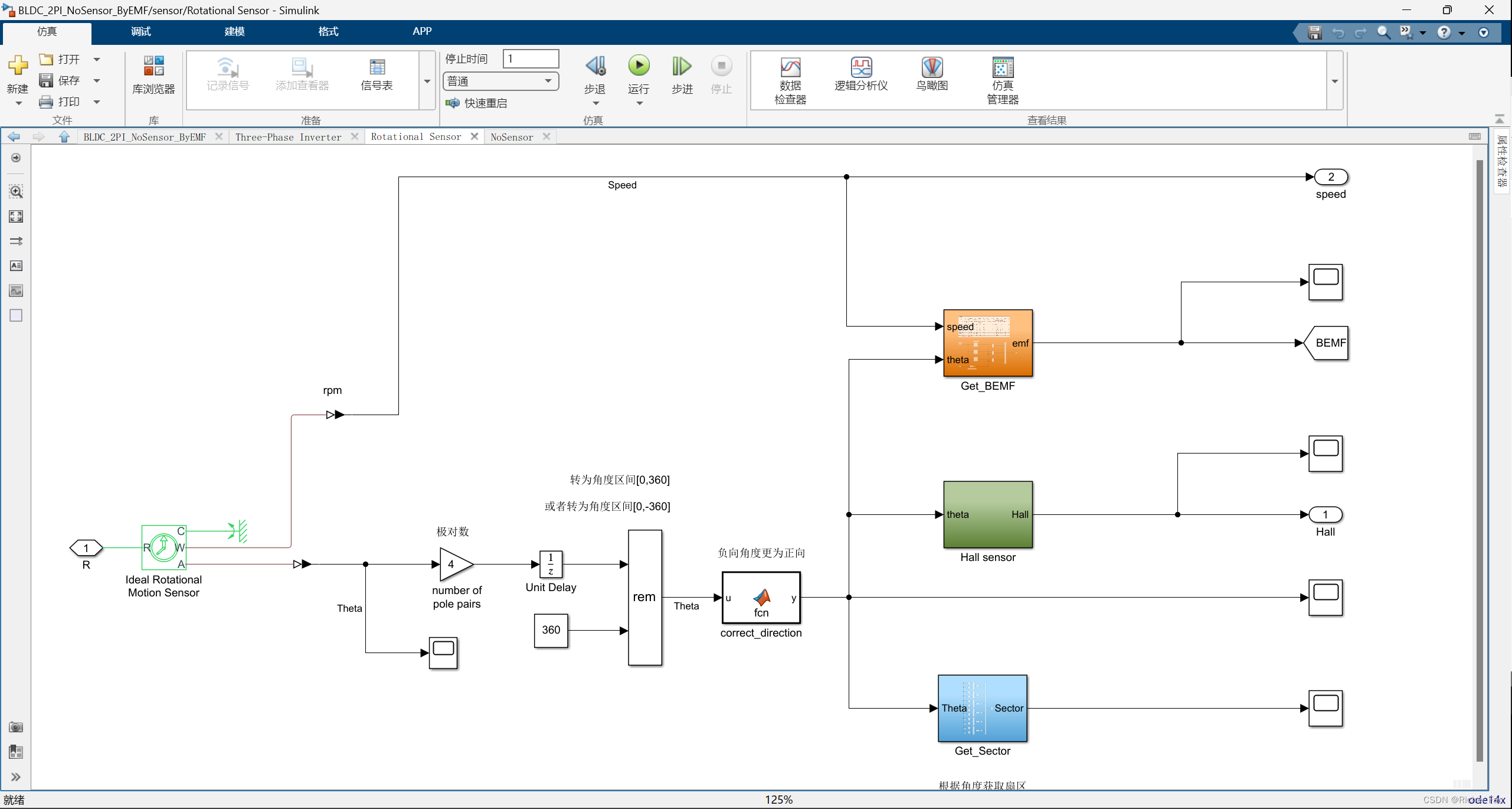
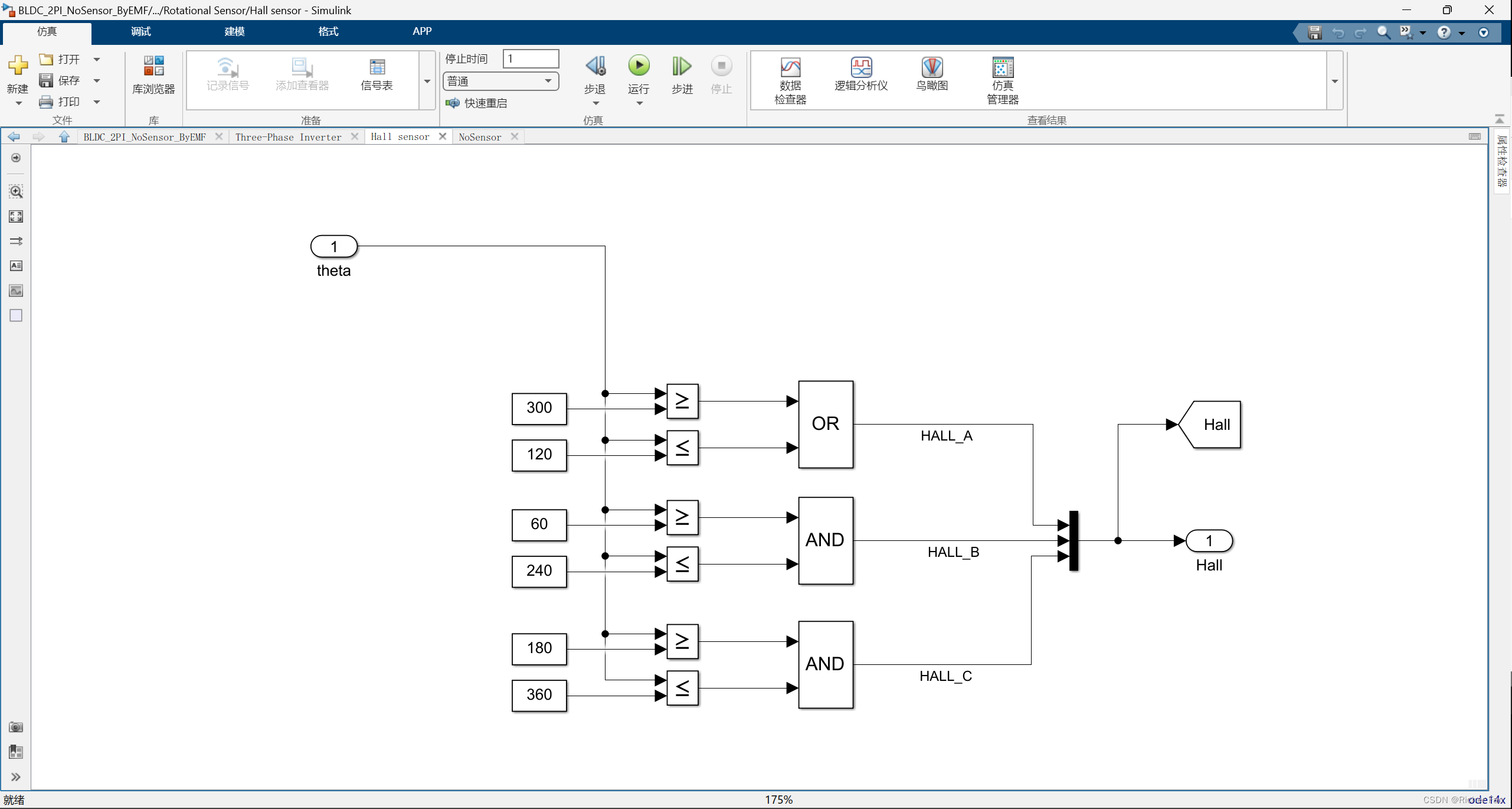
通过转子霍尔信号可以得到换向顺序,也可以直接采用BLDC Commutation Logic直接得到导通顺序
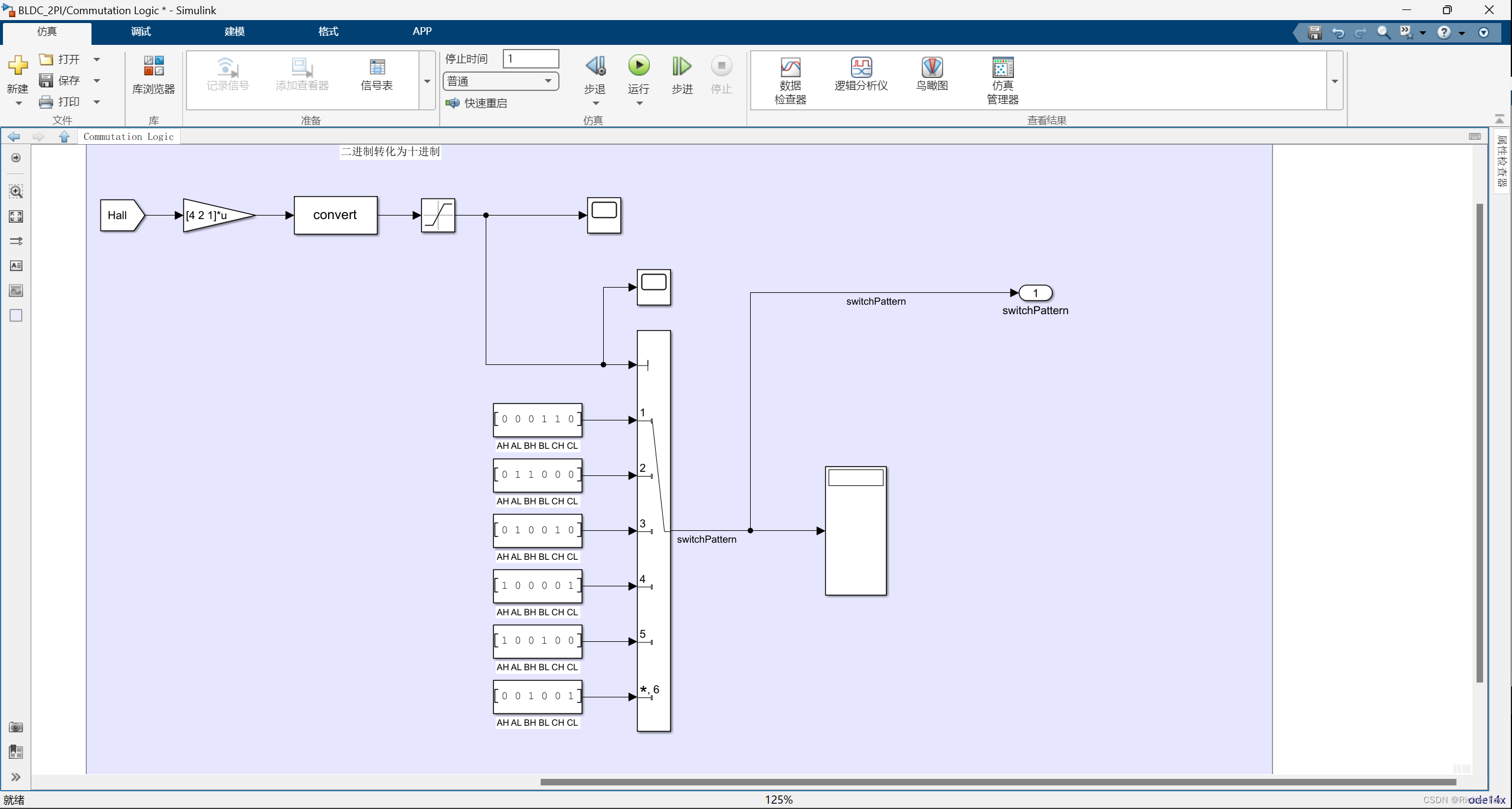
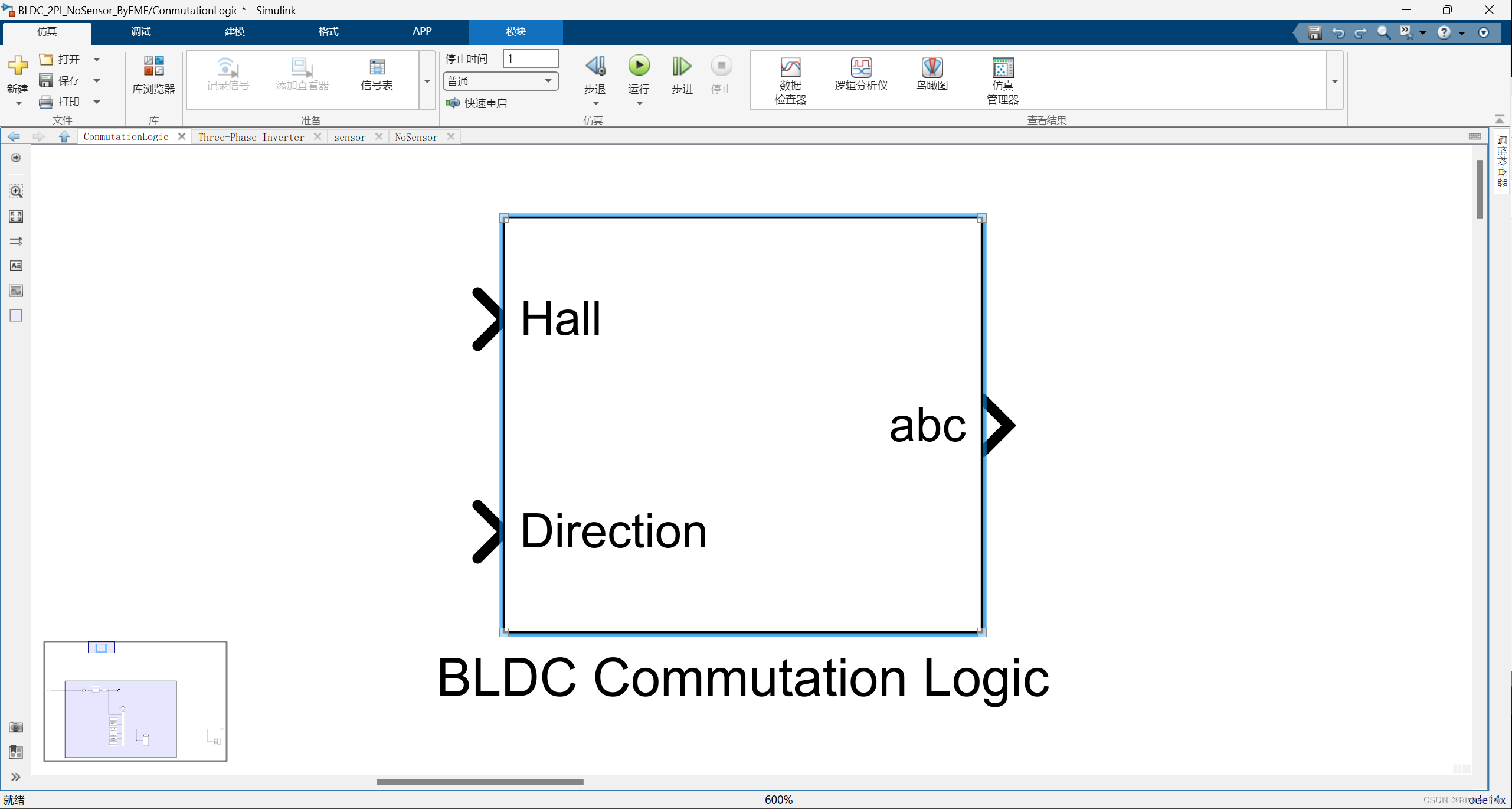
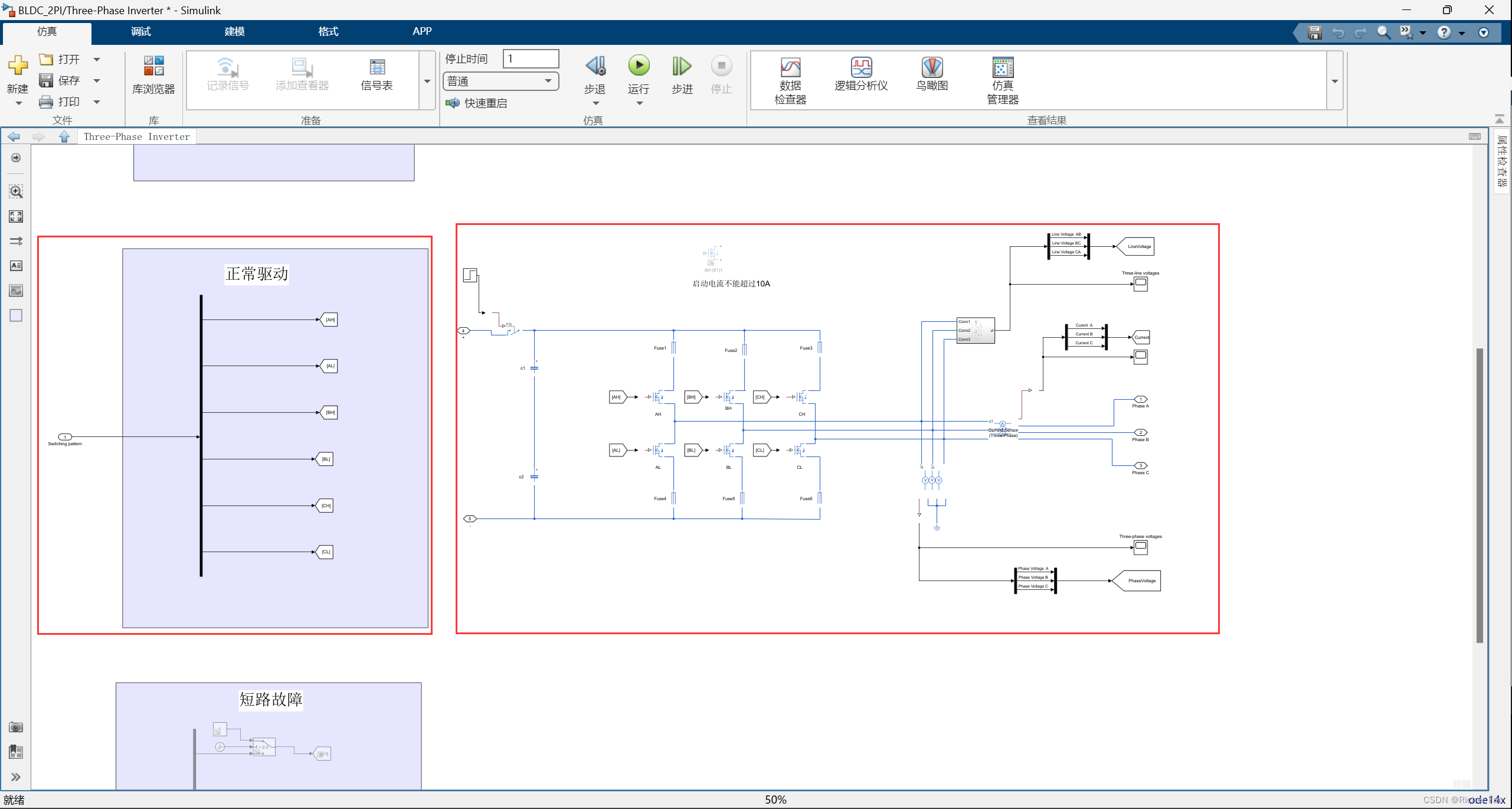
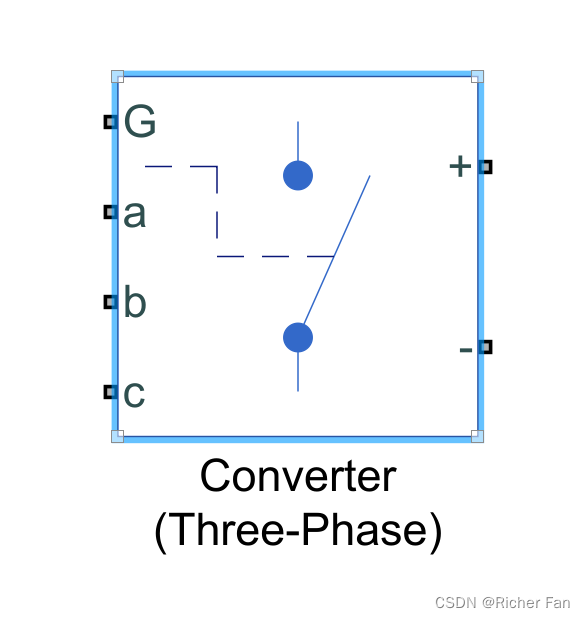
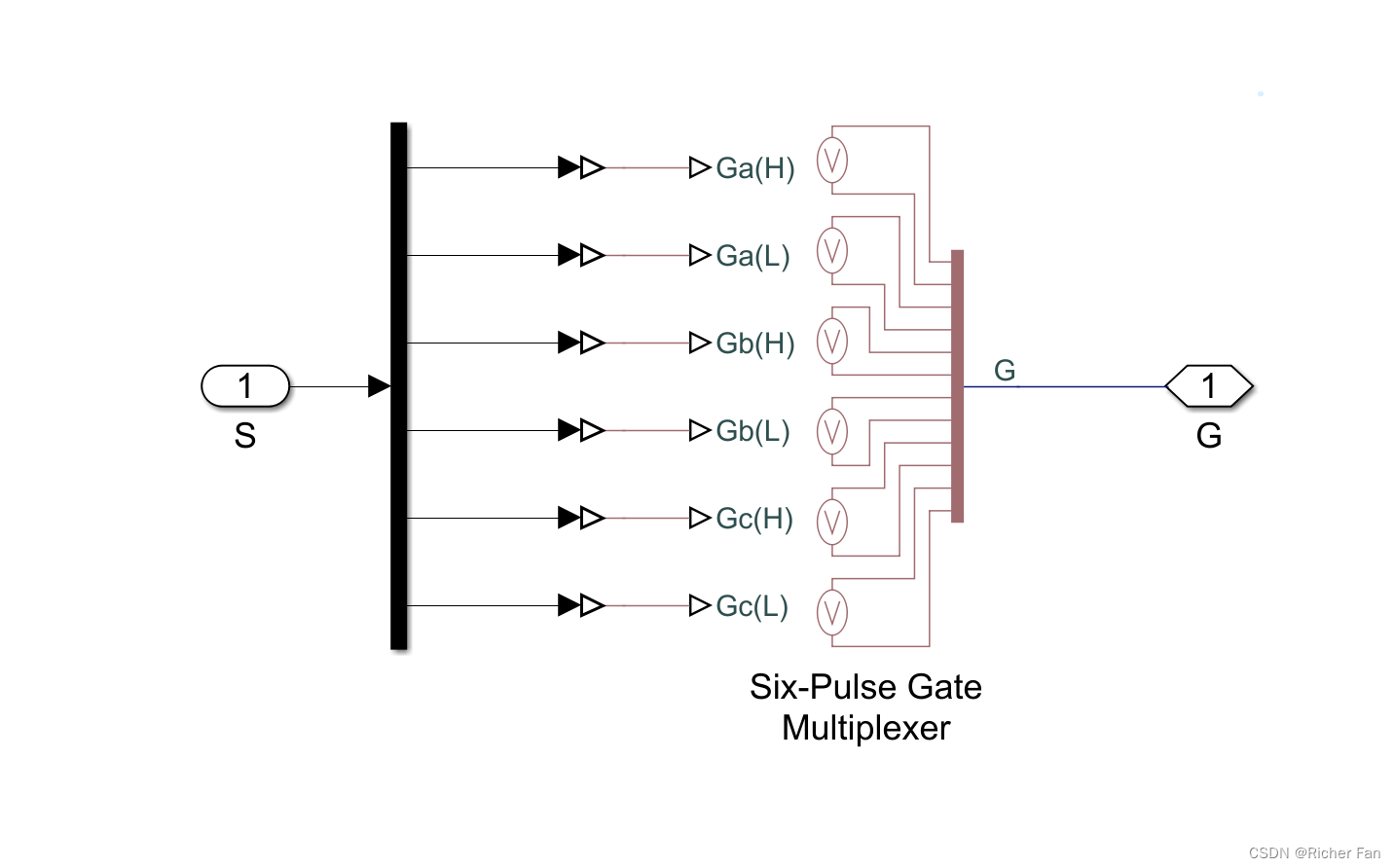
根据换向顺序就可以控制三相全桥逆变器的导通顺,这里可以自己搭建三相全桥逆变器,也可以采用Converter模块。
simulink转化为物理控制信号,需要用到信号转换模块。
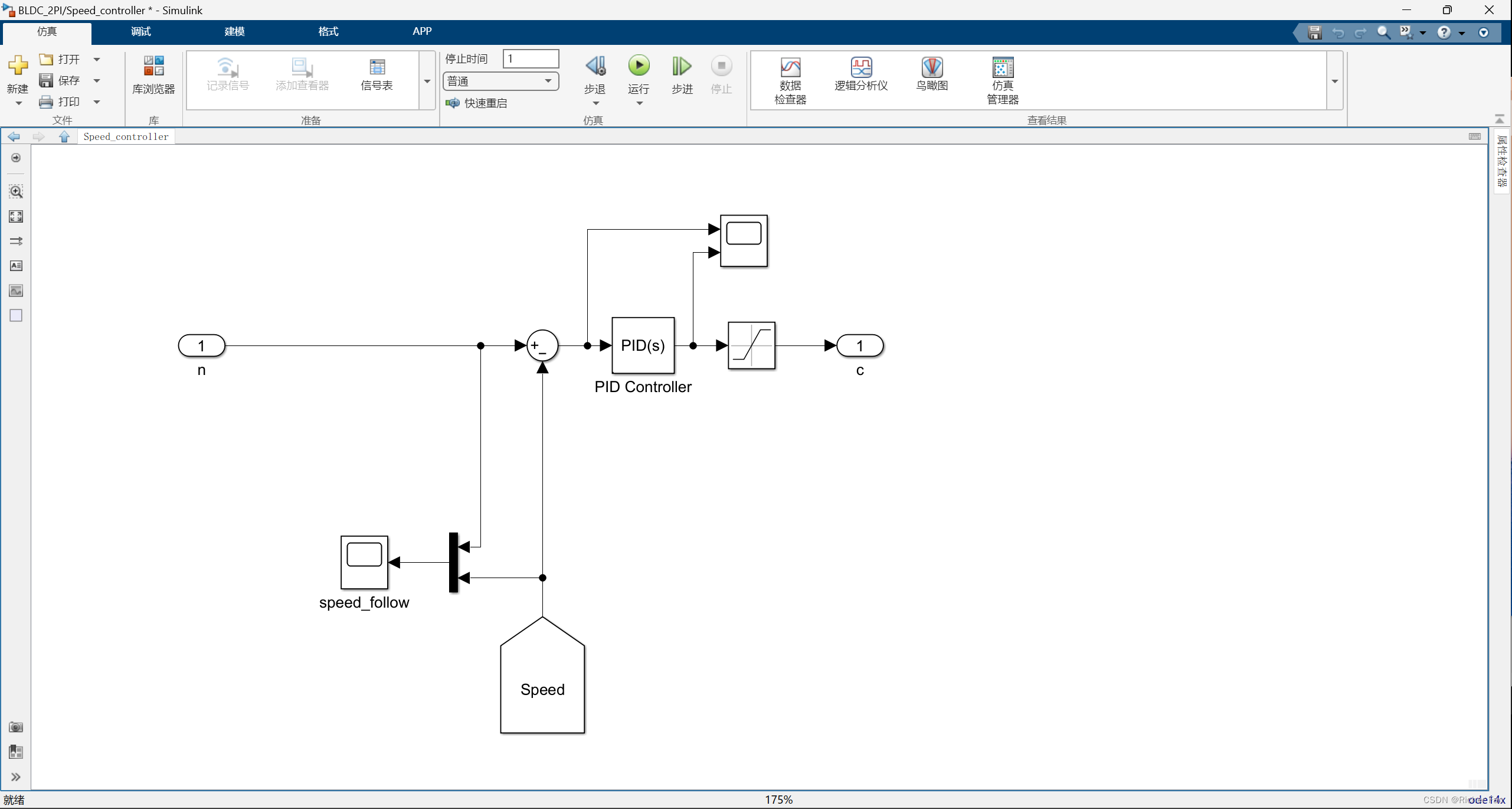
通过速度和电流双闭环控制直流电压源的大小
其中速度环采用PI控制,为了防止启动电流过大,加了一个限幅输出设置电流限幅0-6A,一般电流参数设置为:Kp=限幅电流/参考速度,Ki可以设小点0.01
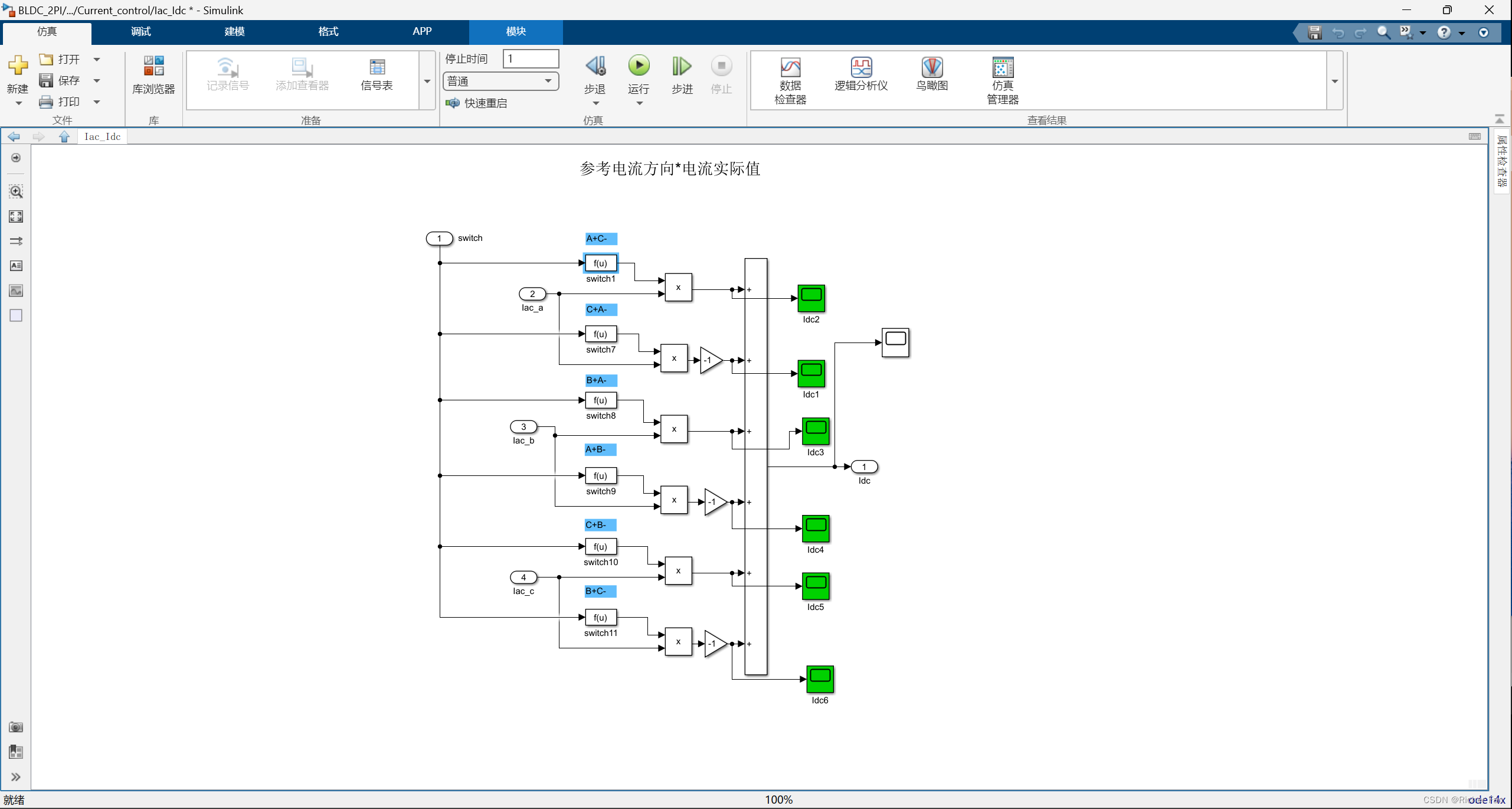
速度暂时设置成这样,再来调节电流环,电流环也是采用PI控制,其反馈电流Idc需要取绝对值相加处理,电流参数设置:Kp尽量设大点,保证输出电流快速跟踪参考电流,再来调节KI来减小电流稳态误差。电流环调好后,再来优化速度环。
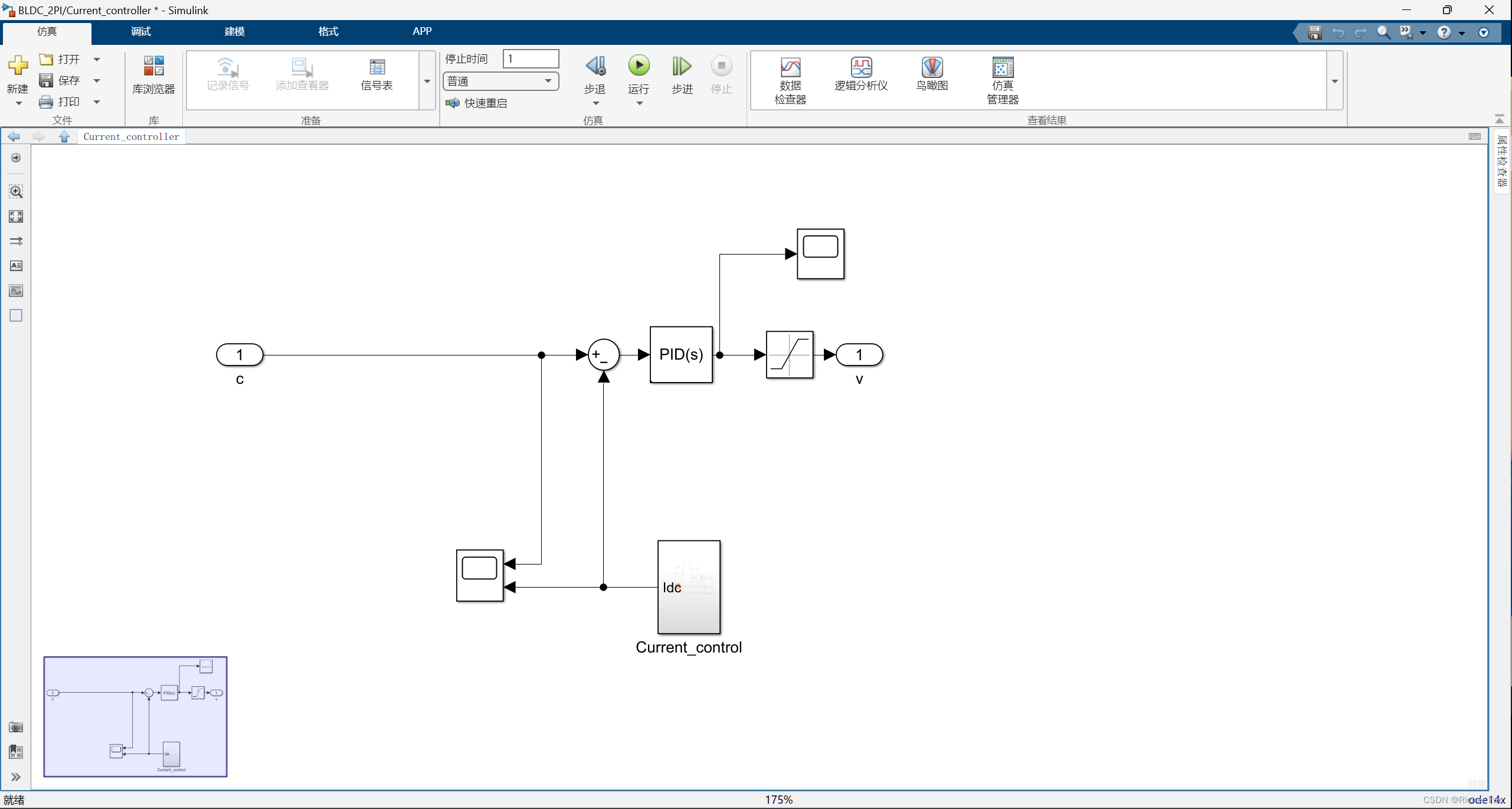
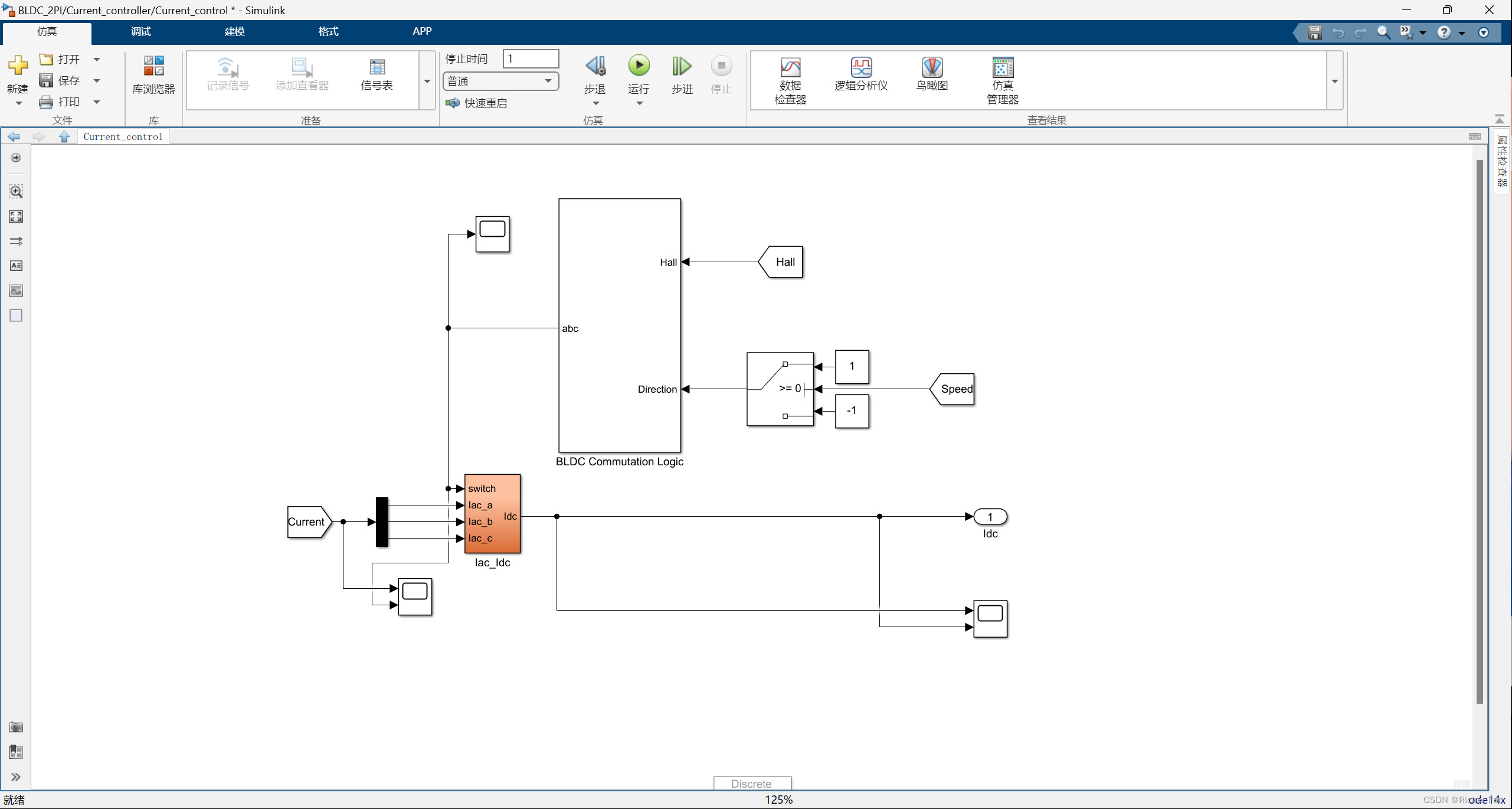
通过换向顺序判断电流是正是负?
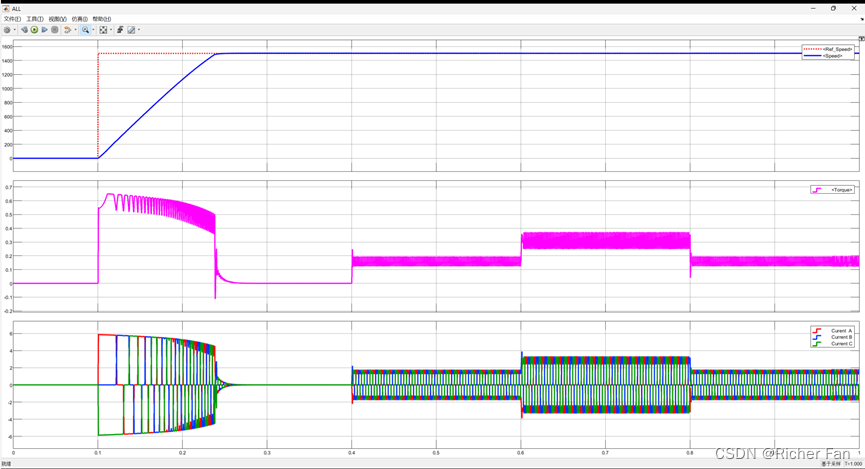
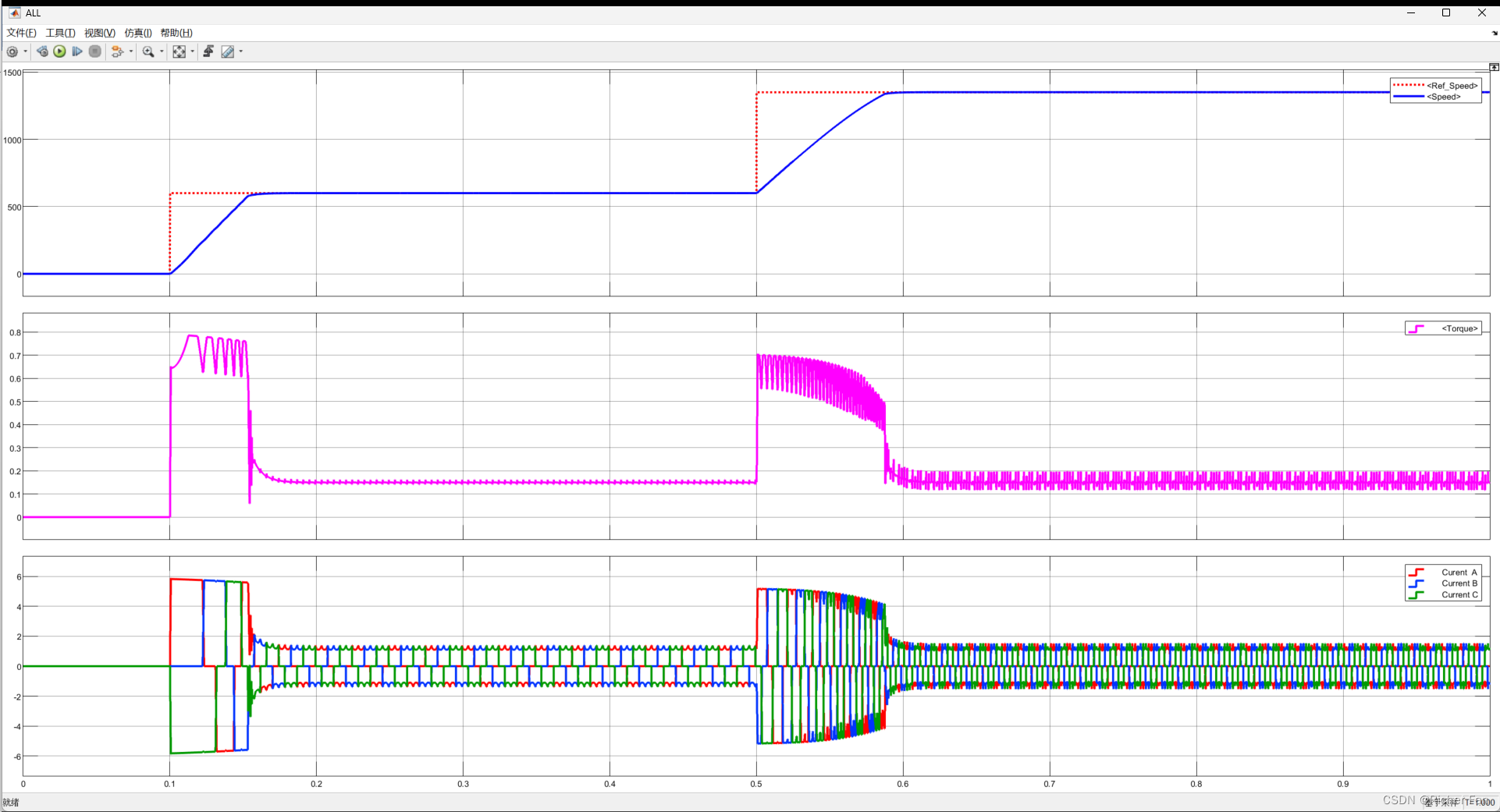
最后,可以看到,无论是变速还是加负载,都能保持良好的速度跟踪响应。



















 44
44

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











