






KOSSI N2RE驱动伺服KMTL60
PDO概念
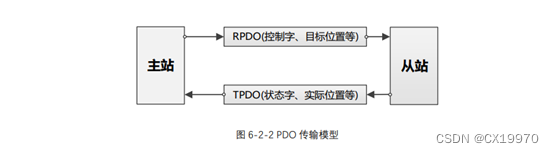
PDO 实时过程数据的传输,遵循生产者-消费者模型。PDO 可分为 RPDO(Receive PDO),从站通过 RPDO 接收主站的指令;和 TPDO(Trasmit PDO),从站通过 TPDO 反馈自身的状态。
编写PDO
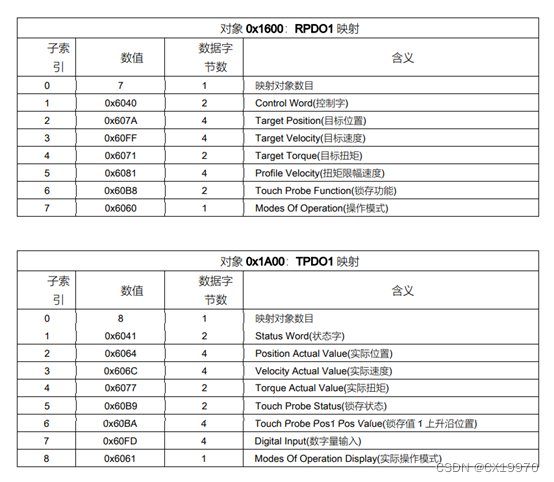
1. 使用`ethercat cstruct`命令获取从站deviceID、vendorID和基础PDO。
2. 参考《N2系列操作手册》补全PDO(TPDO、RPDO)。
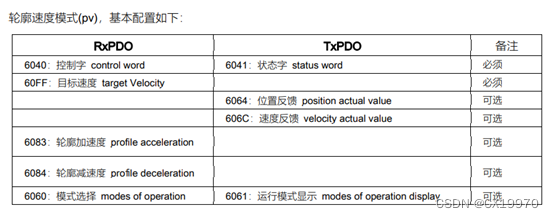
轮廓速度模式(PV)
设置伺服在轮廓速度模式工作
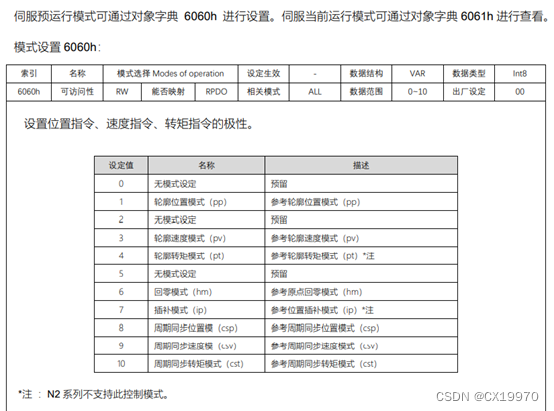
将0x6060设置为3。可通过0x6061观察当前工作模式是否切换到轮廓速度模式。
伺服启动状态切换
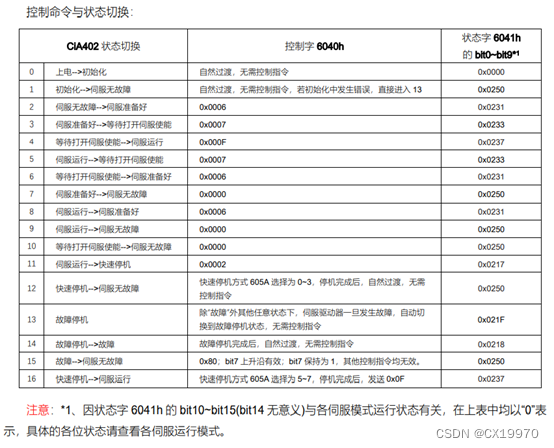
通过0x6040控制,使用0x6041观察伺服状态。
设置伺服速度
通过0x60ff设置电机转速。
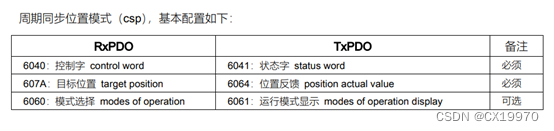
周期同步位置模式(CSP)
设置伺服在周期同步位置模式工作
将0x6060设置为8。可通过0x6061观察当前工作模式是否切换到周期同步位置模式。
2. 伺服启动状态切换
通过0x6040控制,使用0x6041观察伺服状态。
设置伺服位置
当伺服进入“伺服运行(0x0237)”态,持续给伺服目标位置(0x607A)参数,控制伺服运动。
避免进行断崖式位置运动控制,将使电机扭矩极大,弹跳。















 1235
1235











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









