







前言
最近基于RV1126做人脸识别,选用了一款双目摄像头,RGB+IR,RGB Sensor为GC2093,IR Sensor为GC2053,可以读取两个sensor的图像,本节介绍下如何适配添加GC2053 sensor并且可以在windows上成功拉取视频流
平台背景
开发板:易百纳开发板
cpu: rv1126
sensor: gc2053 200w像素 2lanes
type:MIPI
kernel: 4.19.111
system:buildroot-2018.02
硬件连接
原理图下图所示:
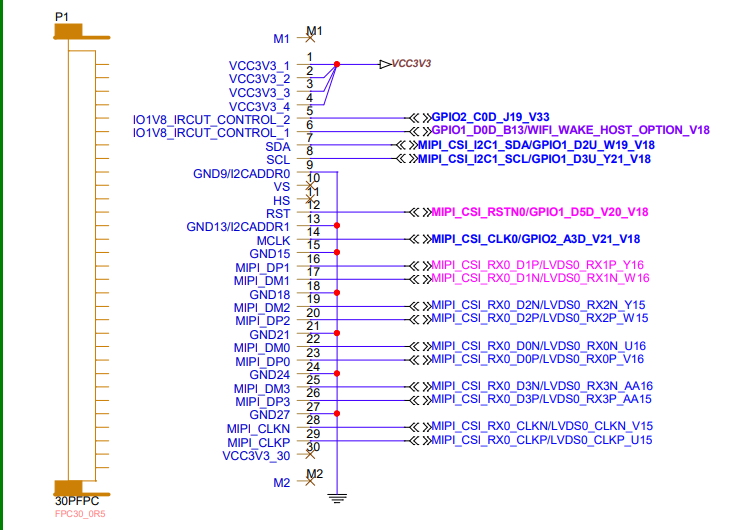
管脚连接关系如下:
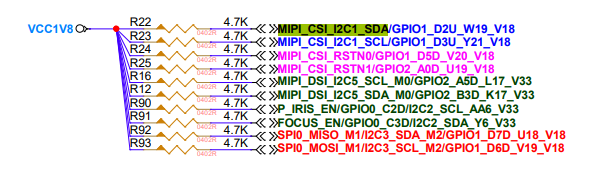
器件I2C总线及地址:
GC2053:I2C1—0x37(7bit address);
CSI:
GC2053--->csi2_dphy0(MIPI_CSI_RX_D0-1&MIPI_CSI_RX_CLK0);
CLK:
GC2053:CLK_OUT0(GPIO2_A3-------CAM_CLKOUT0);
GPIO:
GC2053 reset-gpios---GPIO1_D5;
GC2053 pwdn-gpios---GPIO1_D4;
RV1126的链路举例
结合RK的VICAP和ISP的链路,来看看下面RK356X的一种摄像头链路。注:rv1126的VICAP和ISP是独立的两个图像处理IP
链接关系:
sensor->csi2 dphy0-> mipi csi2 -> cif_mipi_lvds -> rkcif_mipi_lvds -> rkisp_vir0<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6818
6818

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









