






实验三主要使用FEM和hyperelastic模型完成弹性体的模拟
完整项目已上传至github。
文章目录
Linear finite element method(FEM)
弹性的力永远都是想阻碍形变的(划重点)。有限元方法(Finite Element Method) 把物体分割成一个个有体积的单元来模拟。例如,线性有限元方法在二维空间中把物体分割成三角形,在三维空间中把物体分割成四面体。
下面以二维空间上的有限元方法为例
二维空间有限元方法
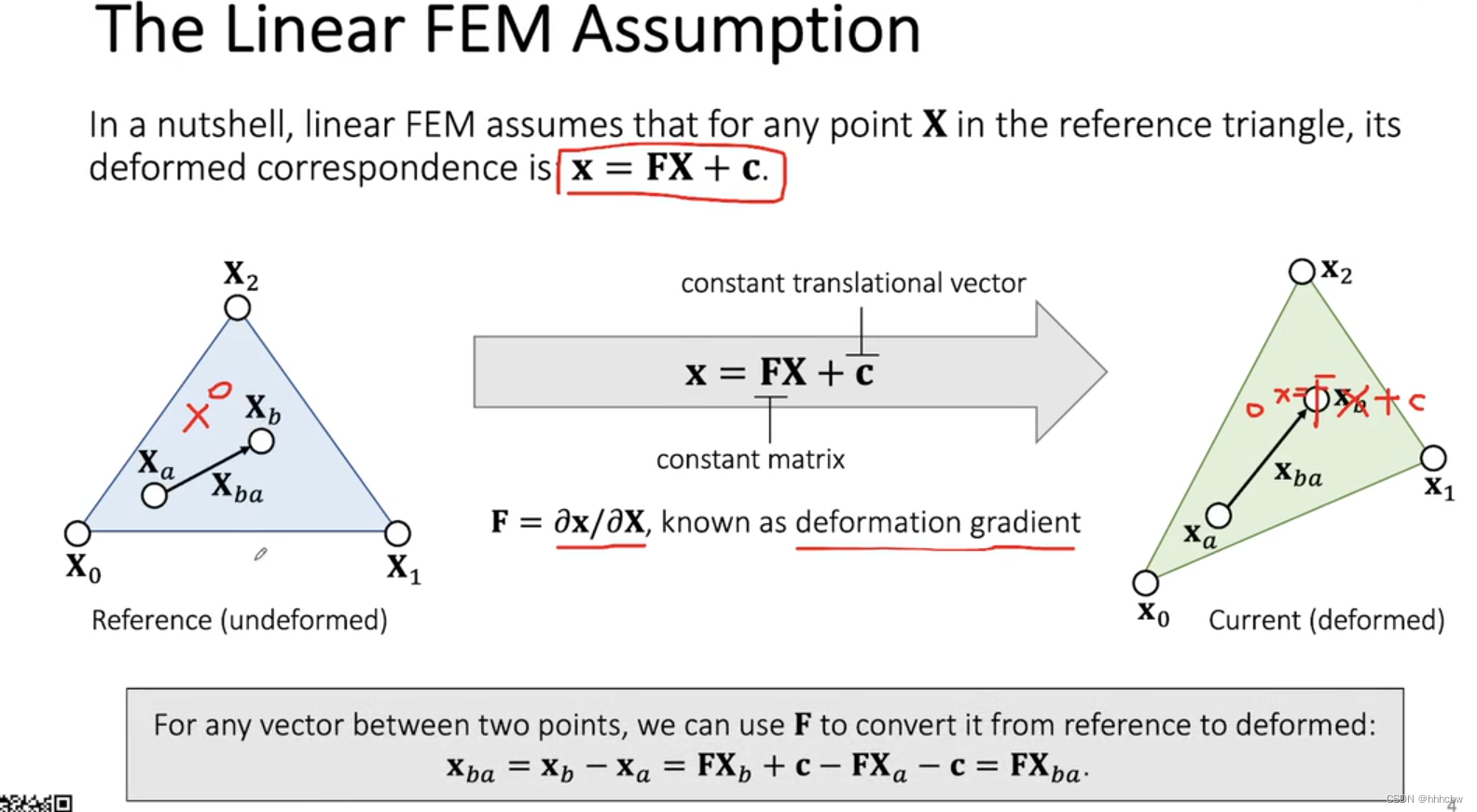
如下图所示,我们把三角形静止时(未发生形变)的状态称为 Reference 状态。假设三角形内部的形变是均匀的,三角形内任意点 X ⃗ \vec{X} X 形变以后的位置 x ⃗ = F ⃗ X ⃗ + c ⃗ \vec{x}=\vec{F}\vec{X}+\vec{c} x=FX+c。注意大写表示形变之前的状态,小写表示形变之后的状态。
则任意向量 X ⃗ b a \vec{X}_{ba} Xba 形变后变成 x ⃗ b a = F ⃗ X ⃗ b a \vec{x}_{ba}=\vec{F}\vec{X}_{ba} xba=FXba。
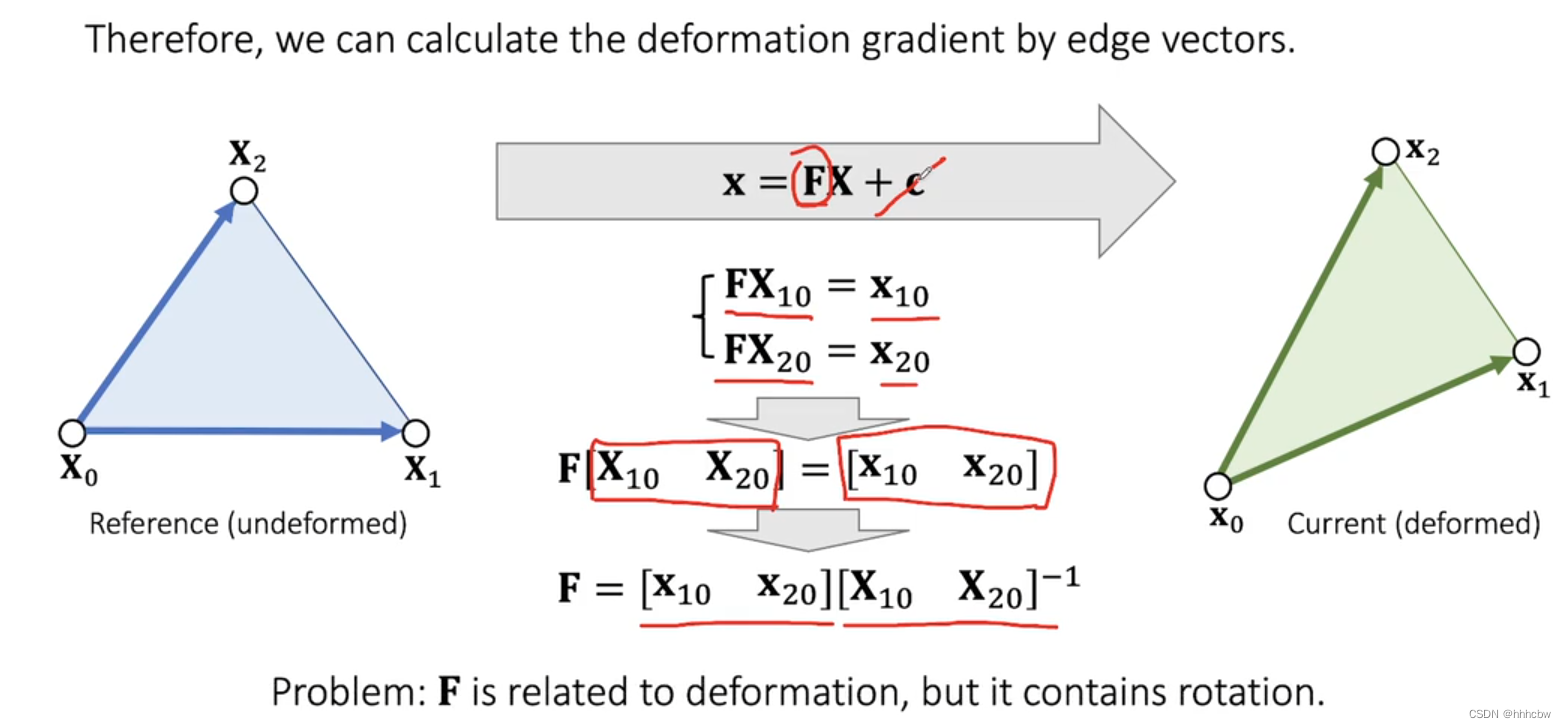
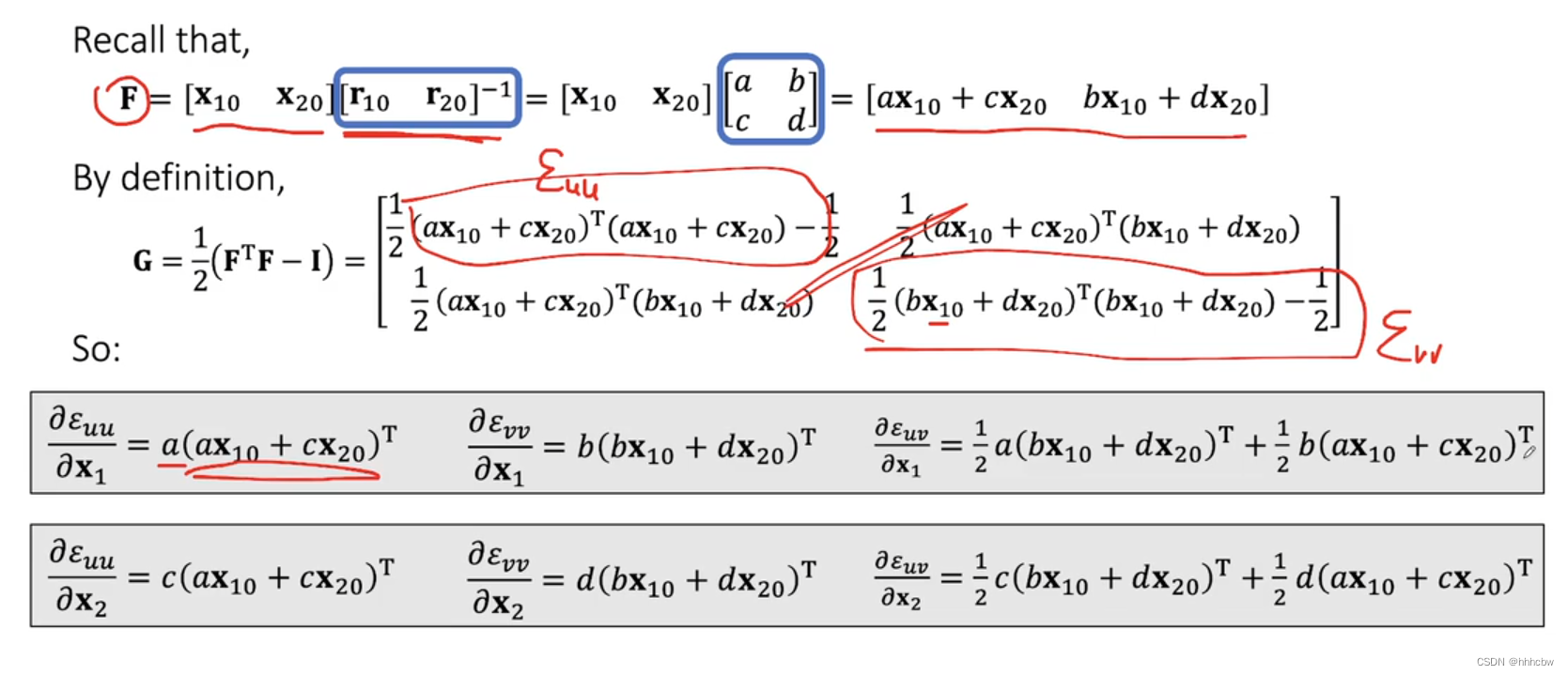
变形梯度(Deformation Gradient)
因为是二维情况(力有两个未知项),所以需要用形变前后三角形两个边向量就能求出 F ⃗ = [ x ⃗ 10 x ⃗ 20 ] [ X ⃗ 10 X ⃗ 20 ] − 1 \vec{F}=[\vec{x}_{10}\space\vec{x}_{20}][\vec{X}_{10}\space\vec{X}_{20}]^{-1} F=[x10 x20][X10 X20]−1。但是求出的力还包括了与旋转相关的部分。
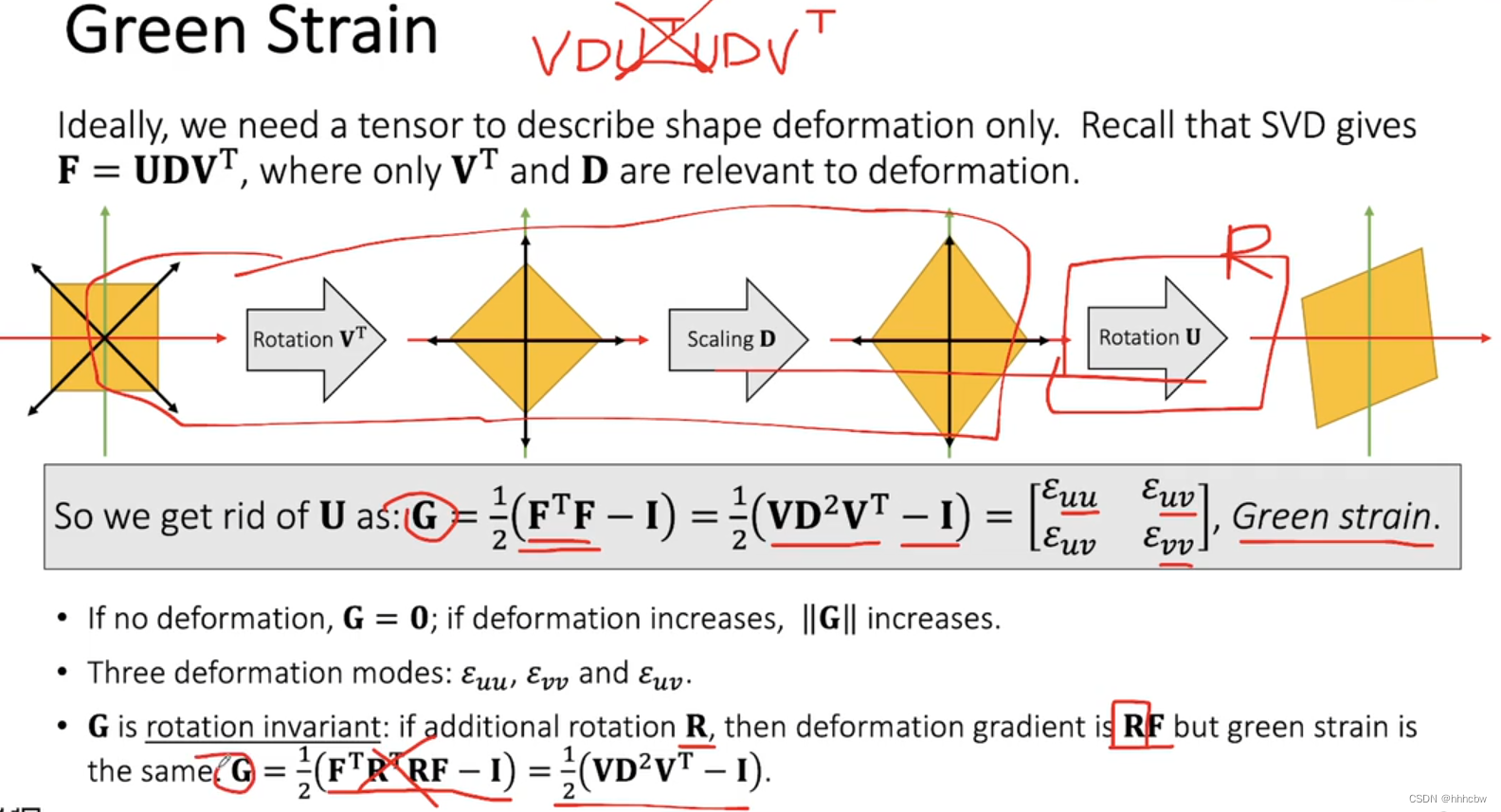
格林应变(Green Strain)
我们可以使用SVD(前两个部分与形变有关,最后一个与旋转有关)分解,求出仅与形变有关的部分。但做SVD分解太复杂了,这里引入 Green Strain,其与旋转无关,仅描述形变(就是做一些矩阵运算,消去旋转部分)。
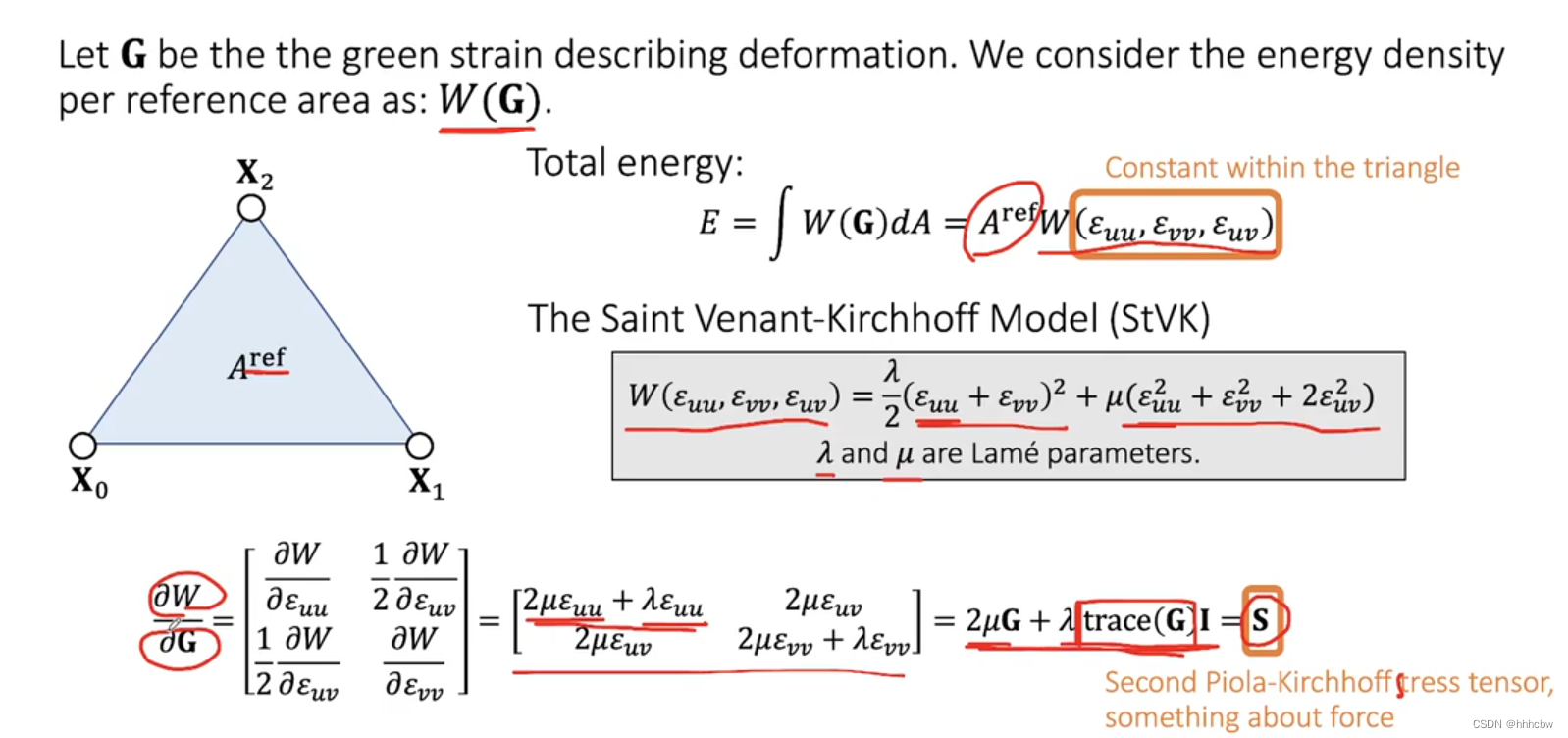
应变能量密度函数(Strain Energy Density Function)
我们再引入一个新的量 W ( G ⃗ ) W(\vec{G}) W(G) 描述参考区域的能量密度。由于在三角形内量,能量密度是常量,总能量就是 W ( G ⃗ ) ∗ d A W(\vec{G})*dA W(G)∗dA 在参考域上的积分。 W ( G ⃗ ) W(\vec{G}) W(G) 直接决定了材料的性质,这里使用StVK模型。
这里最后的
2
μ
+
λ
t
r
a
c
e
(
G
⃗
I
)
=
S
2\mu+\lambda trace(\vec{G}I)=S
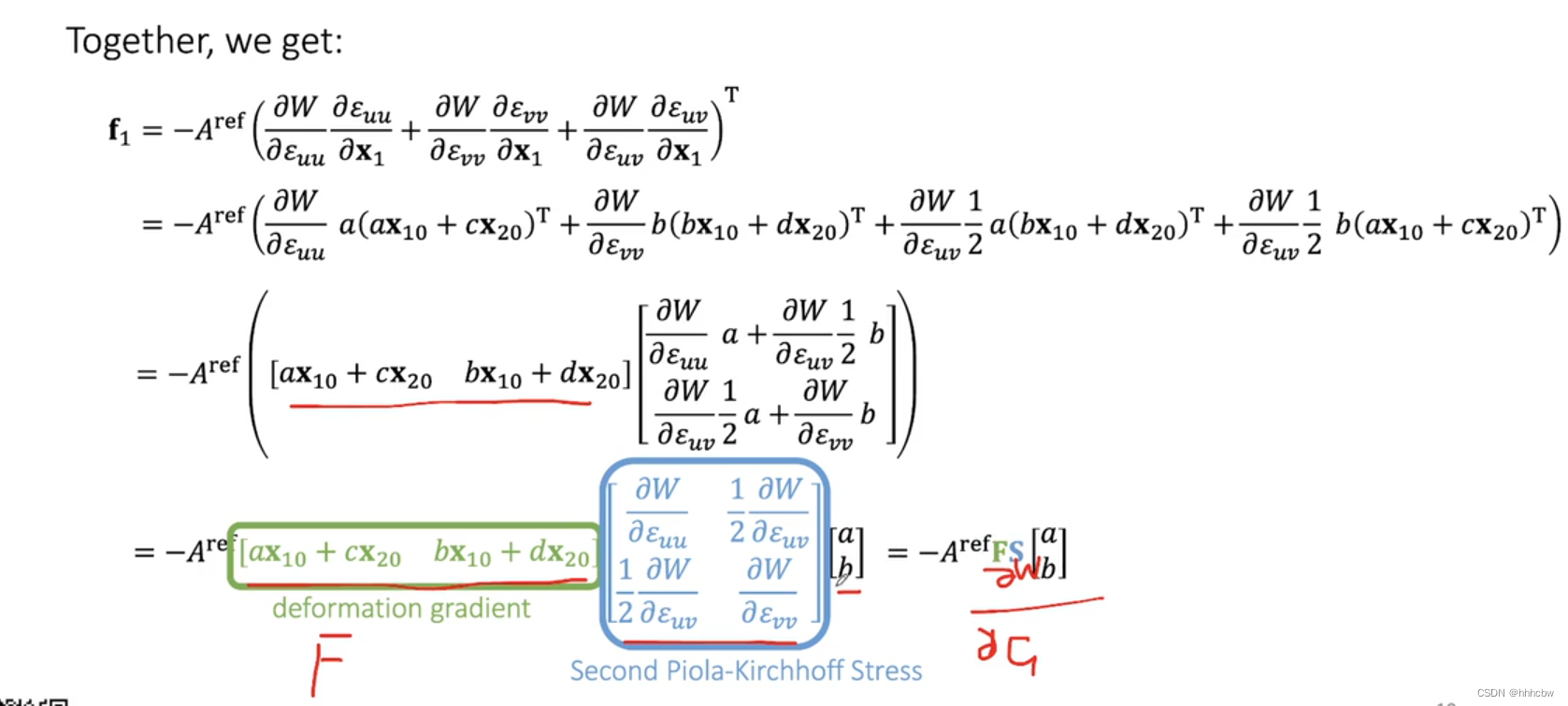
2μ+λtrace(GI)=S 适用于任意维度。这里都是相对静止状态的,所以这里就得到第二皮奥拉-基尔霍夫应力(Second Piola-Krichhoff Stress Tensor)
力(Force)
有了能量的定义,力就可以由能量关于位矢求偏导取负号得到了。
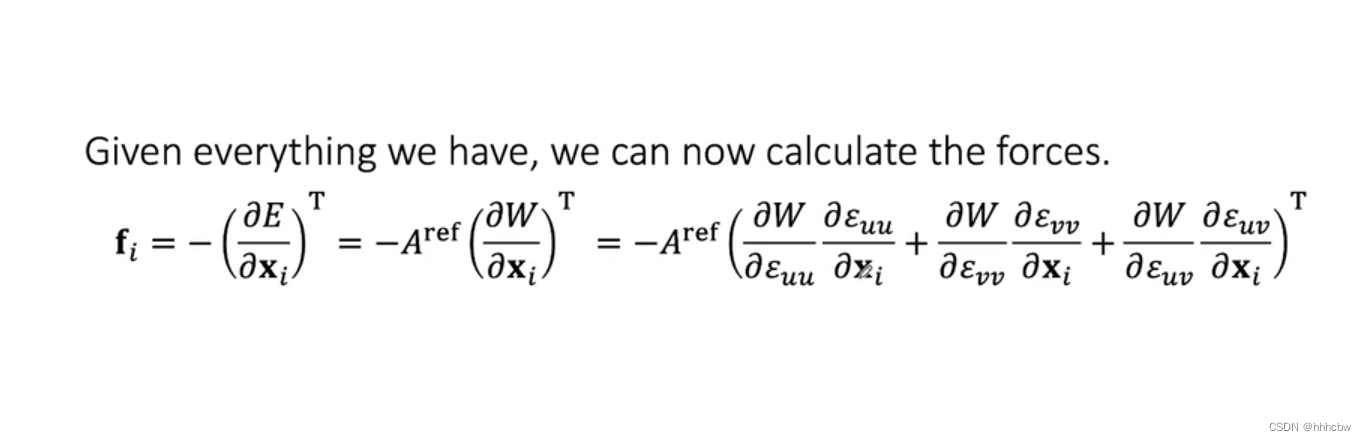
由之前关于
F
⃗
\vec{F}
F 和
G
⃗
\vec{G}
G 的公式,代入可以最后得到
f
⃗
1
\vec{f}_1
f1 关于
A
r
e
f
A^{ref}
Aref,
F
F
F,
S
S
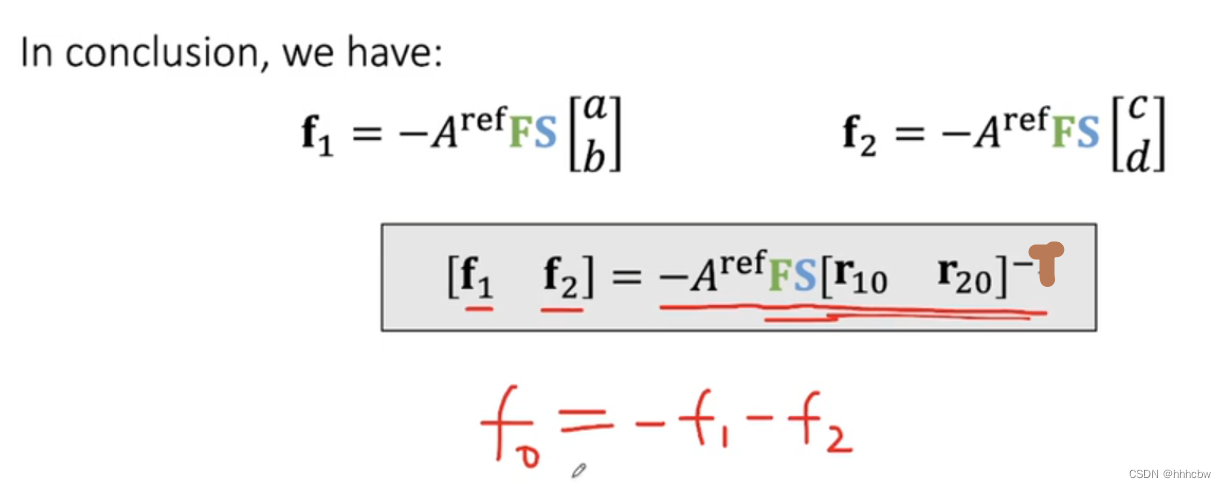
S的表示。
f
⃗
2
\vec{f}_2
f2 也同理能求得,而由系统内合力为 0,我们也可以求得
f
⃗
0
\vec{f}_0
f0
Finite Volume Method(FVM)
FVM 从有限体积的角度考虑,其实对于简单的线性的三角形或四面体,这两个方法是等价的。
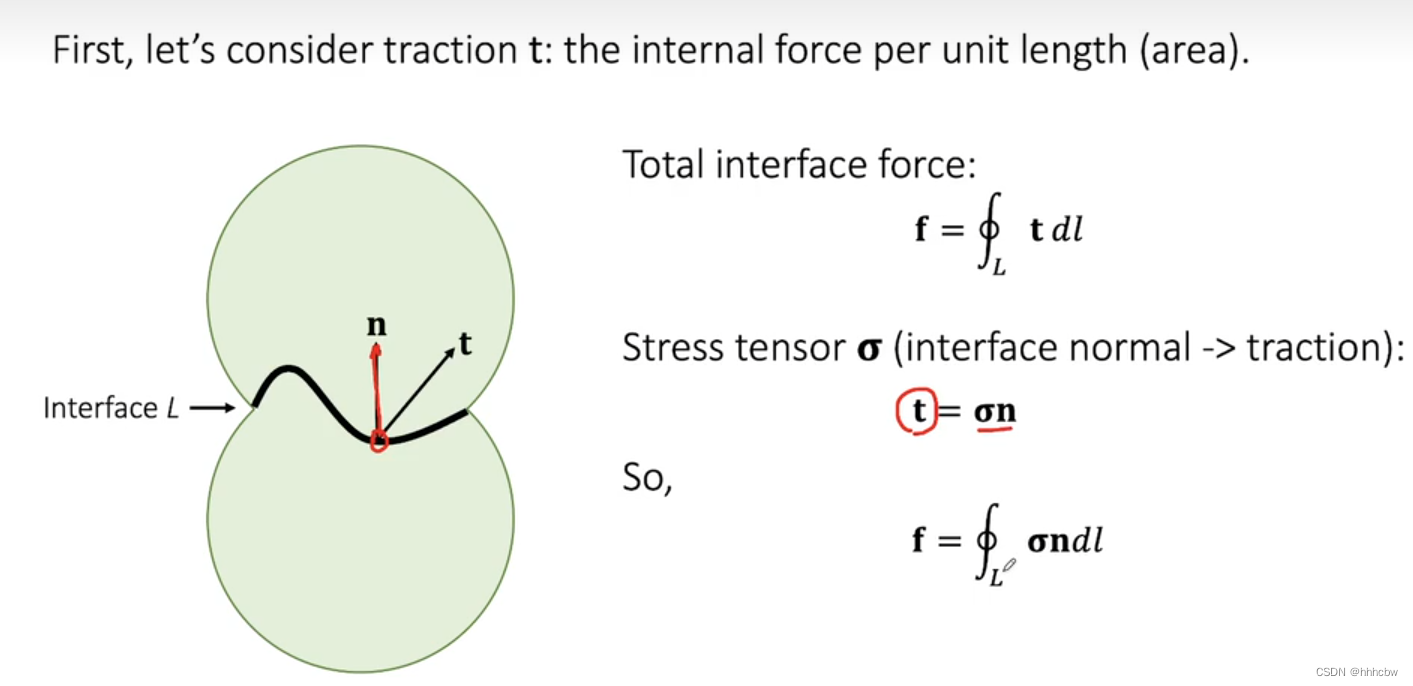
Traction and Stress
基于力是从何而来的思想;定义一个 traction 表示单位长度(面积)上的力,那么表面上的全部力就是 traction 在表面上的积分,而 traction 是与应力张量和法向量有关
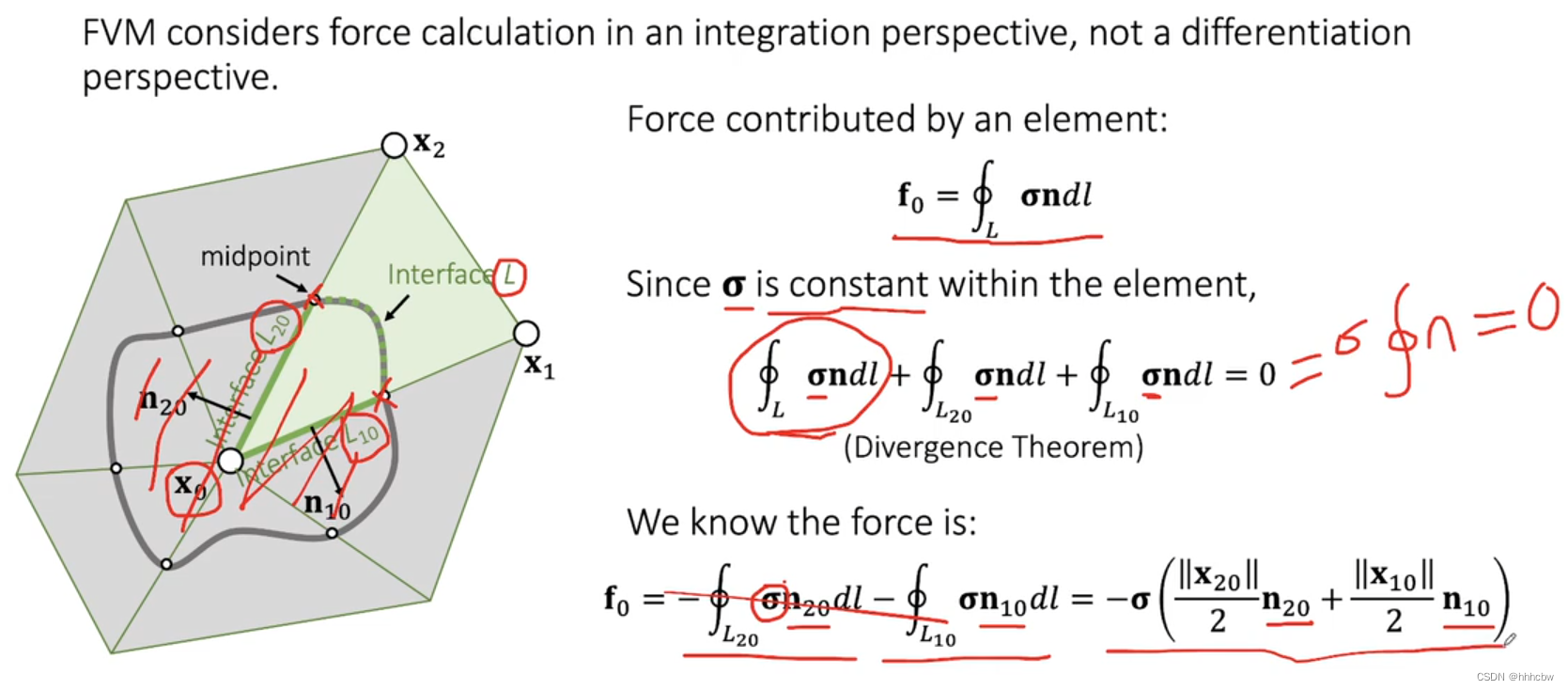
The Finite Volume Method
相当于对法向量进行积分,而在封闭曲线上对法向量积分结果为 0。取中点是为了对三个点力的共享是均匀的。
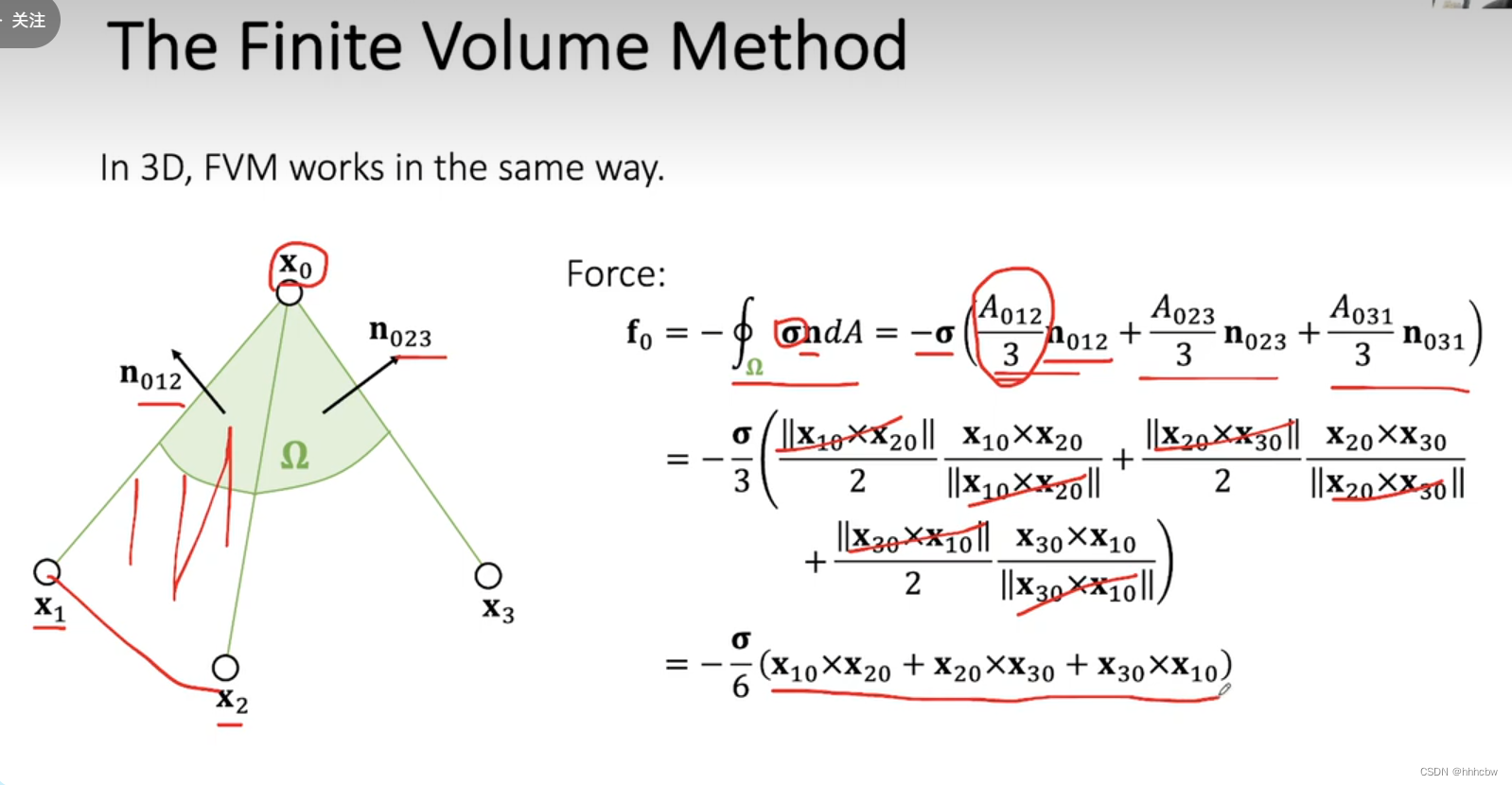
三维的情况就是面积分了
不同参考状态下的stress
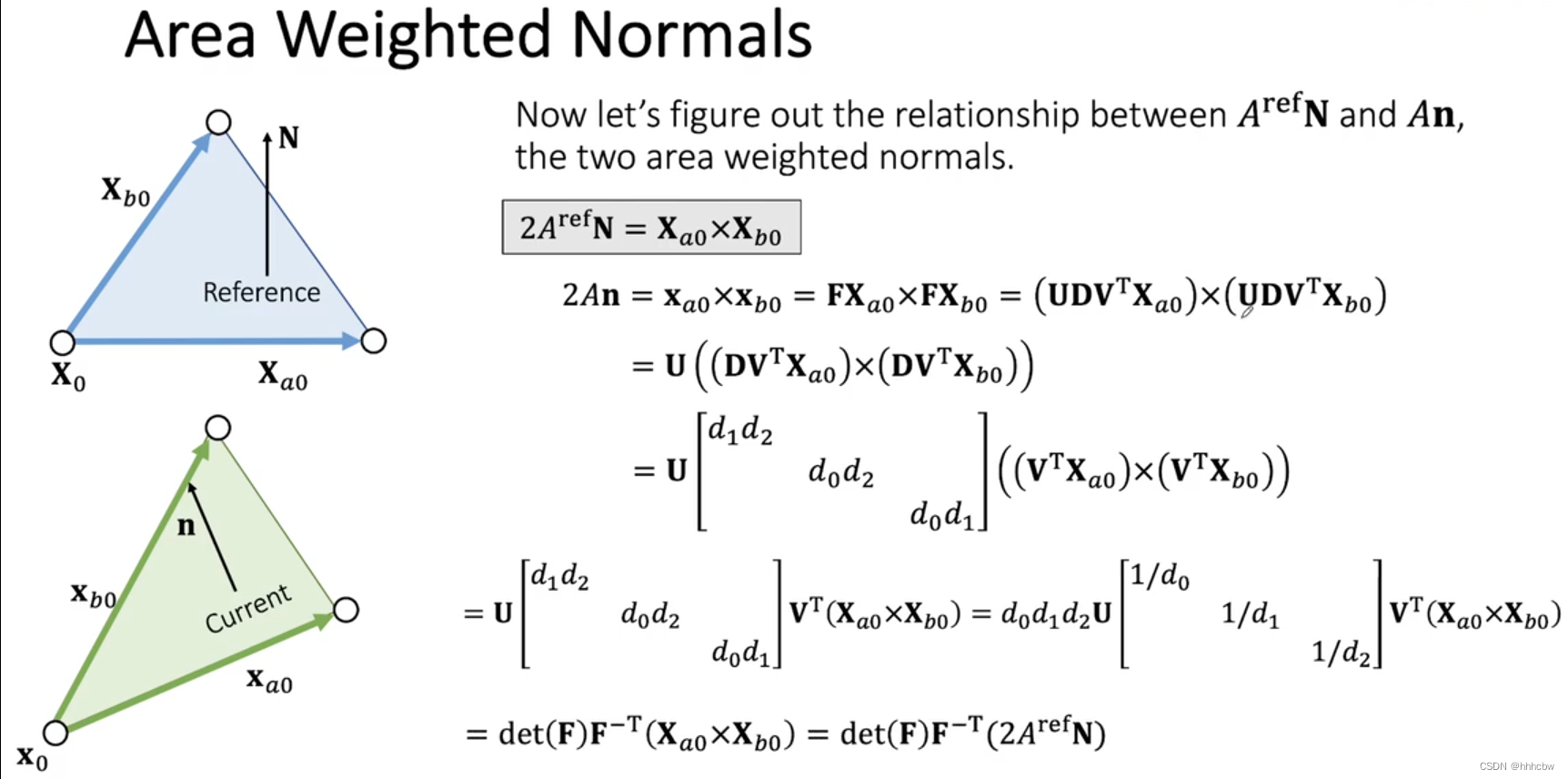
在FEM中,能量密度 W 是在参考状态下定义的。因此,应力 S 是一个将参考状态的法向量 N ⃗ \vec{N} N 映射到参考状态的 traction T ⃗ \vec{T} T。而在FVM中,则是在形变状态下的映射。
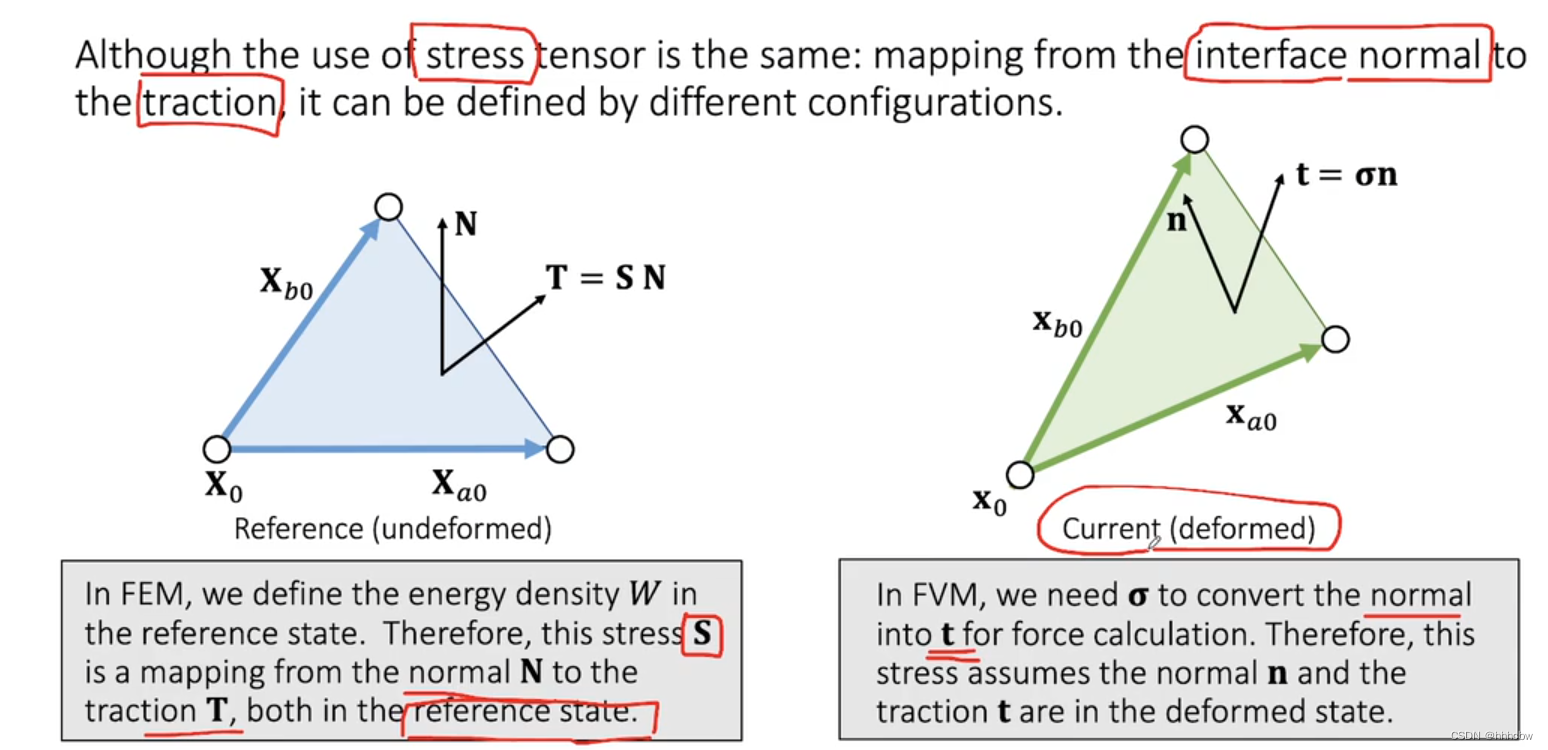
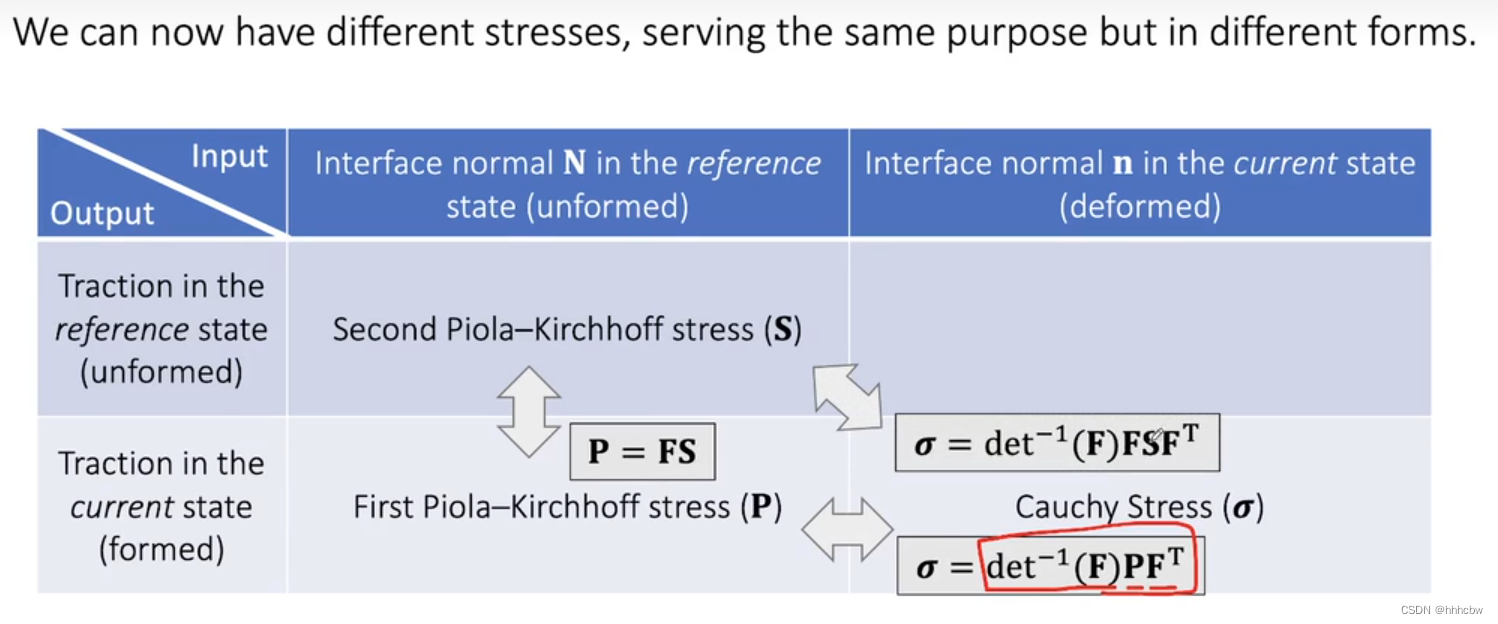
这些应力实际是等价的,只不过参考的状态不同。我们可以由Second Piola-Kirchhoff stress乘上 F 得到 First Piola-Kirchoff stress。再由 First Piola-Kirchoff stress得到Cauchy stress。

下面我们根据两个状态下 Area Weighted Normals 之间的关系,找到 First Piola-Kirchhoff stress 与 Cauchy Stress 之间的关系
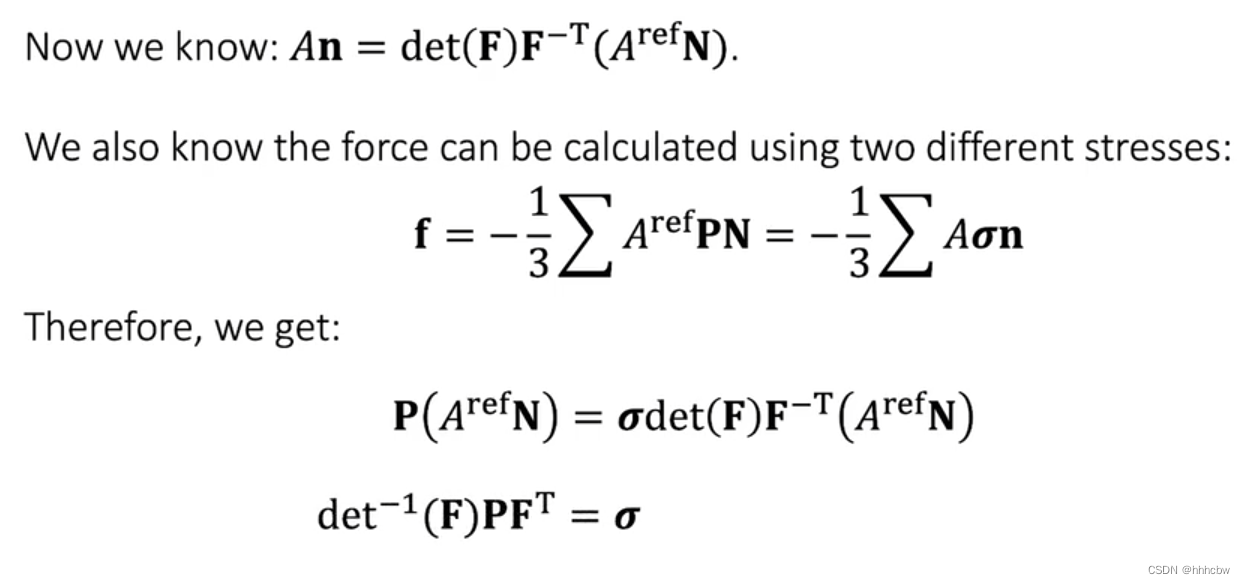
我们得到不同状态下应力之间的关系
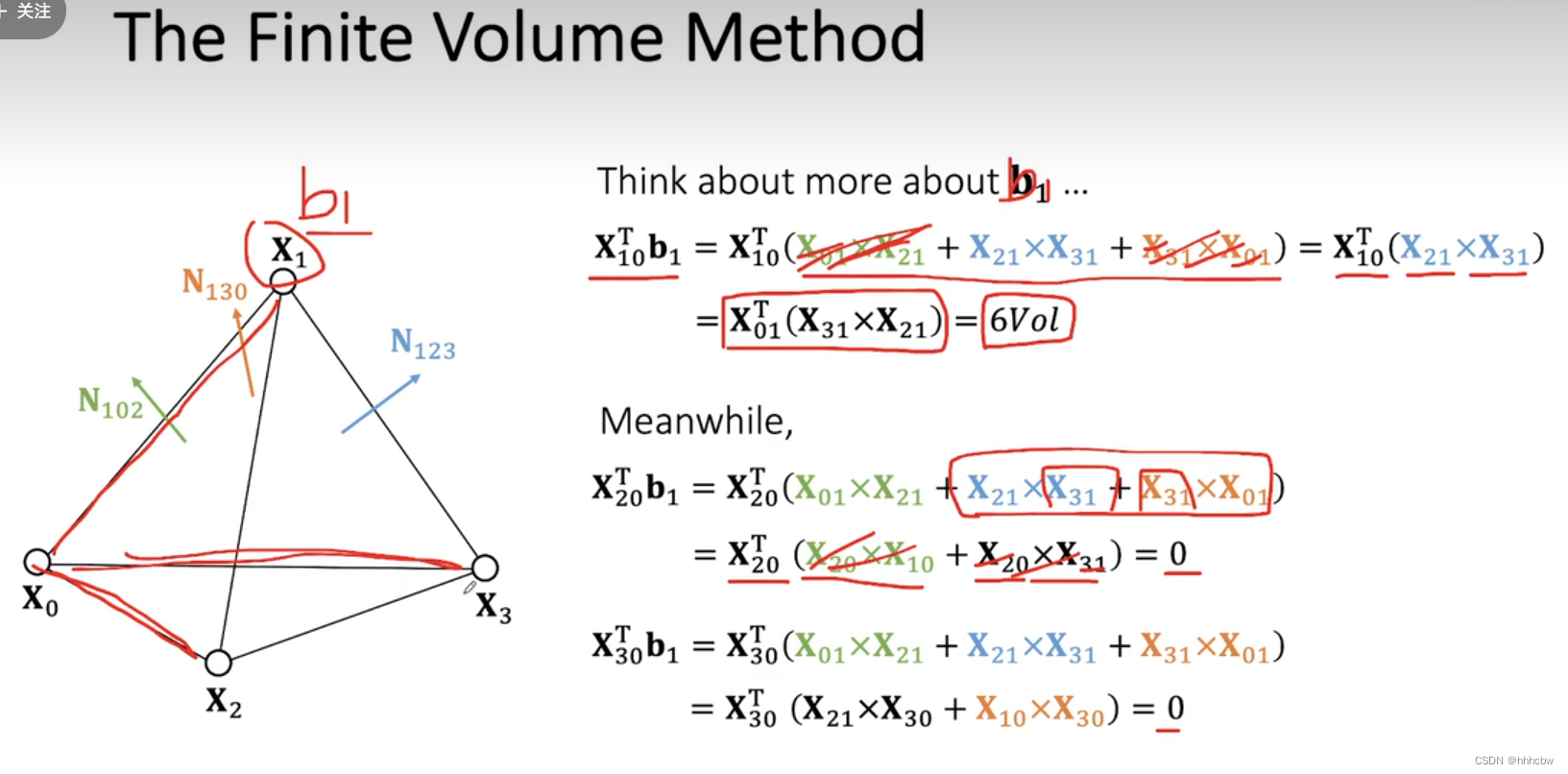
有了上面应力之间的转换关系,我们可以把之前形变状态下的公式,转化一下,因为后面叉乘求和是个常量,因此可用提前计算得到。
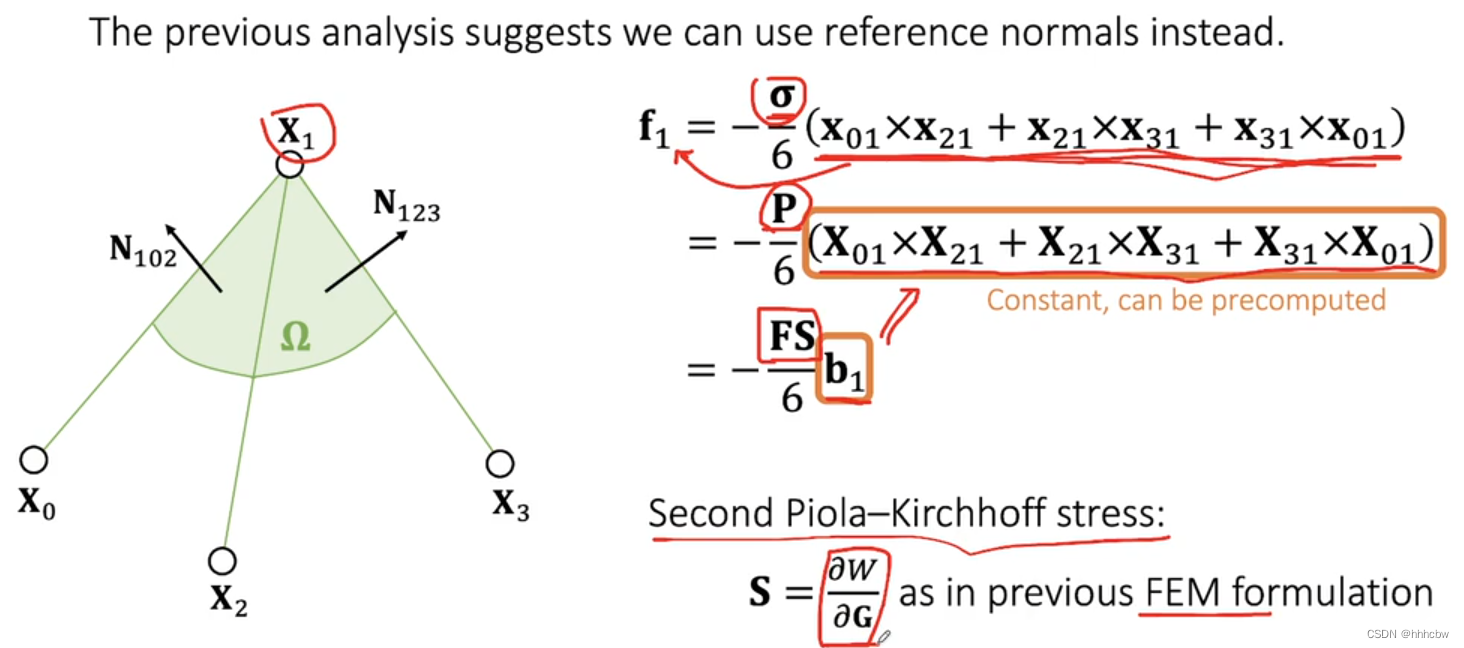
后续可以进一步化简,比如
X
10
X_{10}
X10 与
X
01
×
X
21
X_{01}\times X_{21}
X01×X21 的点乘结果肯定是 0,因为叉乘产生的向量垂直于
X
10
X_{10}
X10。
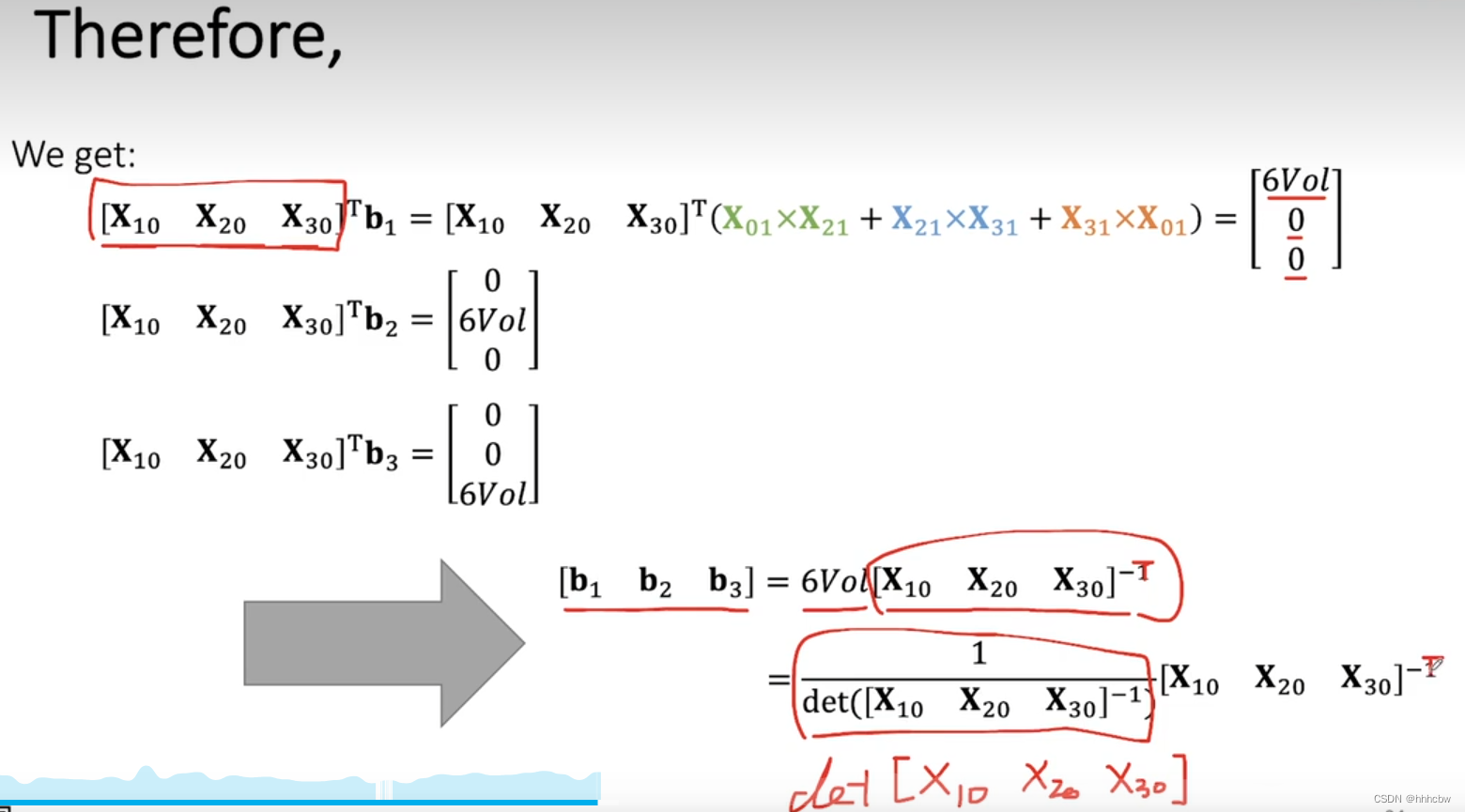
 由
1
d
e
t
(
[
X
⃗
10
X
⃗
20
X
⃗
30
]
−
1
)
=
d
e
t
[
X
⃗
10
X
⃗
20
X
⃗
30
]
\frac{1}{det([\vec{X}_{10}\space\vec{X}_{20}\space\vec{X}_{30}]^{-1})} = det[\vec{X}_{10}\space\vec{X}_{20}\space\vec{X}_{30}]
det([X10 X20 X30]−1)1=det[X10 X20 X30] 可进一步得到如下公式
由
1
d
e
t
(
[
X
⃗
10
X
⃗
20
X
⃗
30
]
−
1
)
=
d
e
t
[
X
⃗
10
X
⃗
20
X
⃗
30
]
\frac{1}{det([\vec{X}_{10}\space\vec{X}_{20}\space\vec{X}_{30}]^{-1})} = det[\vec{X}_{10}\space\vec{X}_{20}\space\vec{X}_{30}]
det([X10 X20 X30]−1)1=det[X10 X20 X30] 可进一步得到如下公式
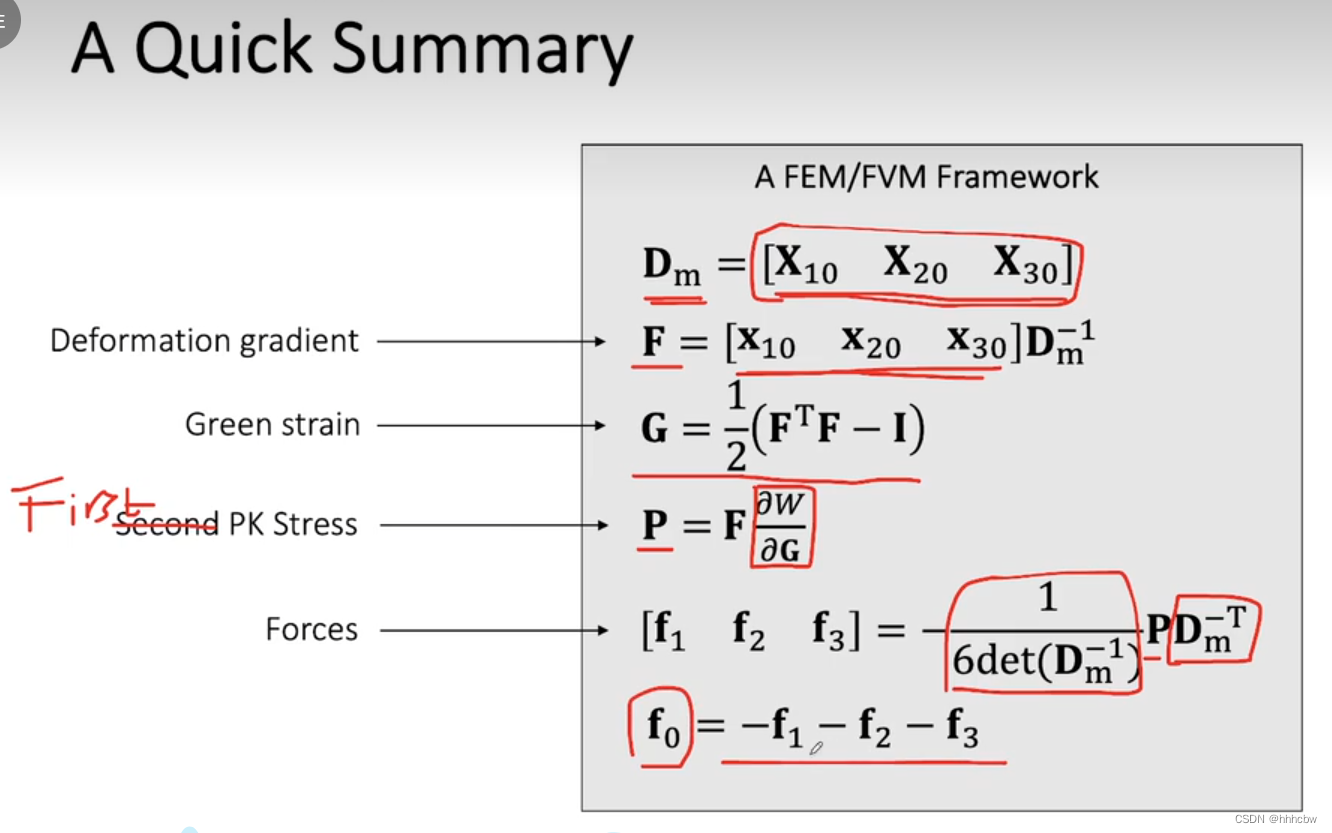
算法流程
根据上面的推导,可以总结为如下算法流程
代码
核心代码如下,就是按照上面的算法流程,把对应的物理量计算出来,带入公式即可。这里由于是显式积分,所以存在数值不稳定性,使用拉普拉斯平滑进行处理(就是加权平均一个体的其他三个点的速度)
for(int tet=0; tet<tet_number; tet++)
{
//TODO: Deformation Gradient
Matrix4x4 F = Build_Edge_Matrix(tet) * inv_Dm[tet];
//TODO: Green Strain
Matrix4x4 G = Matrix4x4_mul_float(Matrix4x4_minus_Matrix4x4(F.transpose * F, Matrix4x4.identity), 0.5f);
//TODO: Second PK Stress
Matrix4x4 S = Matrix4x4.zero;
float trace = G[0, 0] + G[1, 1] + G[2, 2];
S = Matrix4x4_add_Matrix4x4(Matrix4x4_mul_float(G, 2.0f * stiffness_1), Matrix4x4_mul_float(Matrix4x4.identity, stiffness_0 * trace));
//TODO: Elastic Force
float volume = 1.0f / (inv_Dm[tet].determinant * 6);
Matrix4x4 Elastic_force = Matrix4x4_mul_float(F * S * inv_Dm[tet].transpose, -volume);
for (int k=0; k<3; k++)
{
Force[Tet[tet * 4 + k + 1]].x += Elastic_force[0, k];
Force[Tet[tet * 4 + k + 1]].y += Elastic_force[1, k];
Force[Tet[tet * 4 + k + 1]].z += Elastic_force[2, k];
}
// Elastic_force0 = -Elastic_force1-Elastic_force2-Elastic_force3
Force[Tet[tet * 4 + 0]].x -= Elastic_force[0, 0] + Elastic_force[0, 1] + Elastic_force[0, 2];
Force[Tet[tet * 4 + 0]].y -= Elastic_force[1, 0] + Elastic_force[1, 1] + Elastic_force[1, 2];
Force[Tet[tet * 4 + 0]].z -= Elastic_force[2, 0] + Elastic_force[2, 1] + Elastic_force[2, 2];
}
Smooth_V(0.75f);
结果
Hyperelastic Models
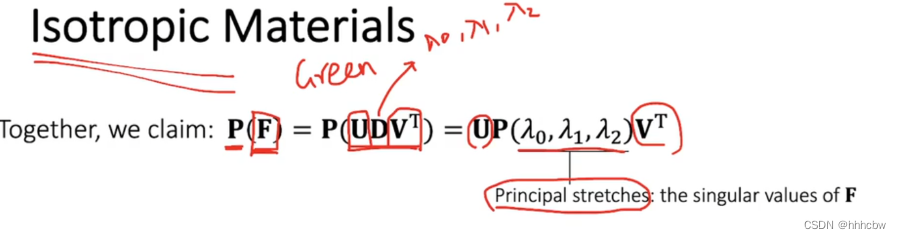
Isotropic Materials
各向同性材料,其与拉伸方向无关。P可以认为是F的一个函数,Principal stretches是对角元素,表示三个方向上的拉伸量
在论文中,一般以下面的方式表示,PPT里把
I
I
C
II_C
IIC与
I
I
I
C
III_C
IIIC写反了。
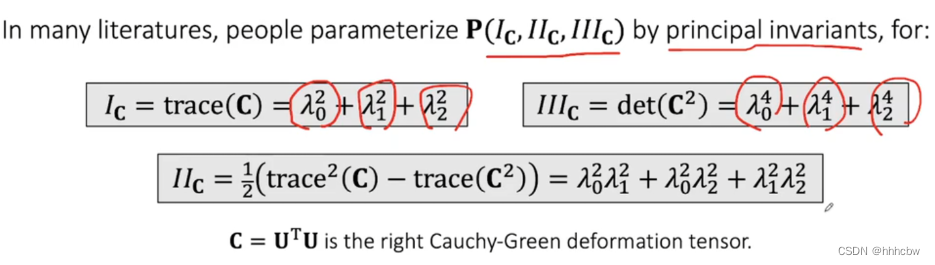
论文里的如下

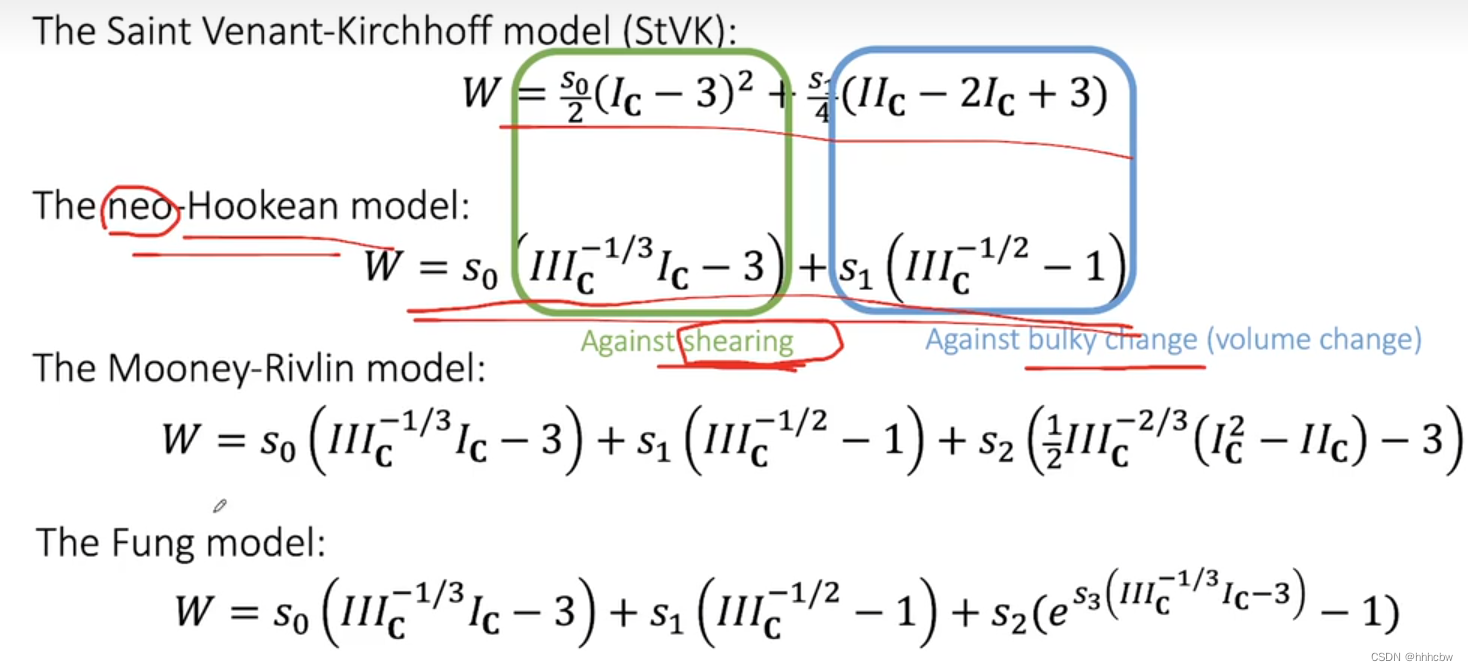
Isotropic Models
第一项抵抗拉伸,第二项阻止体积改变
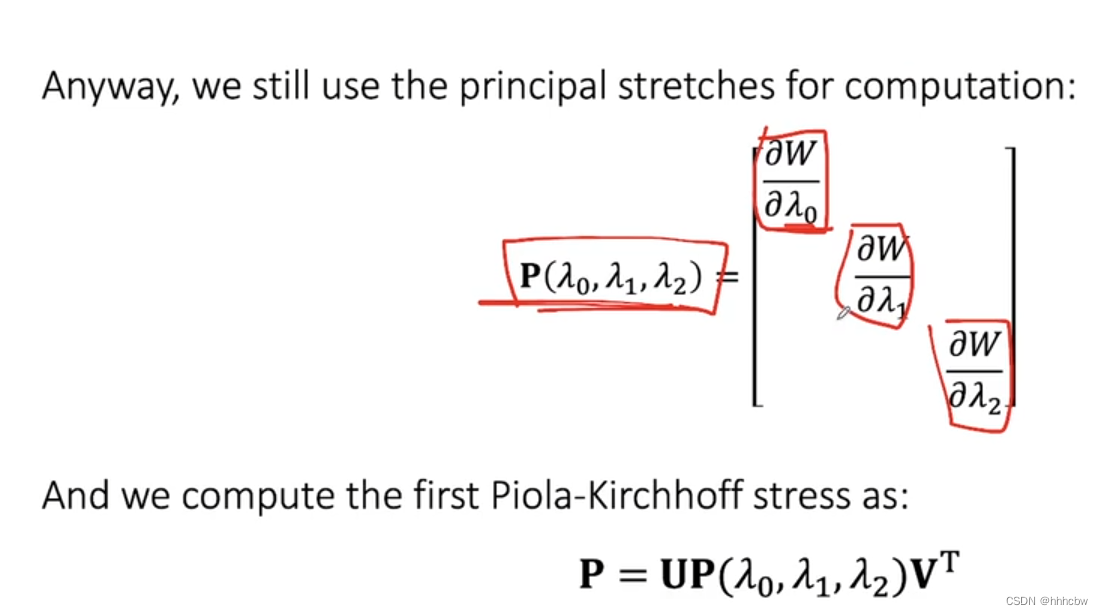
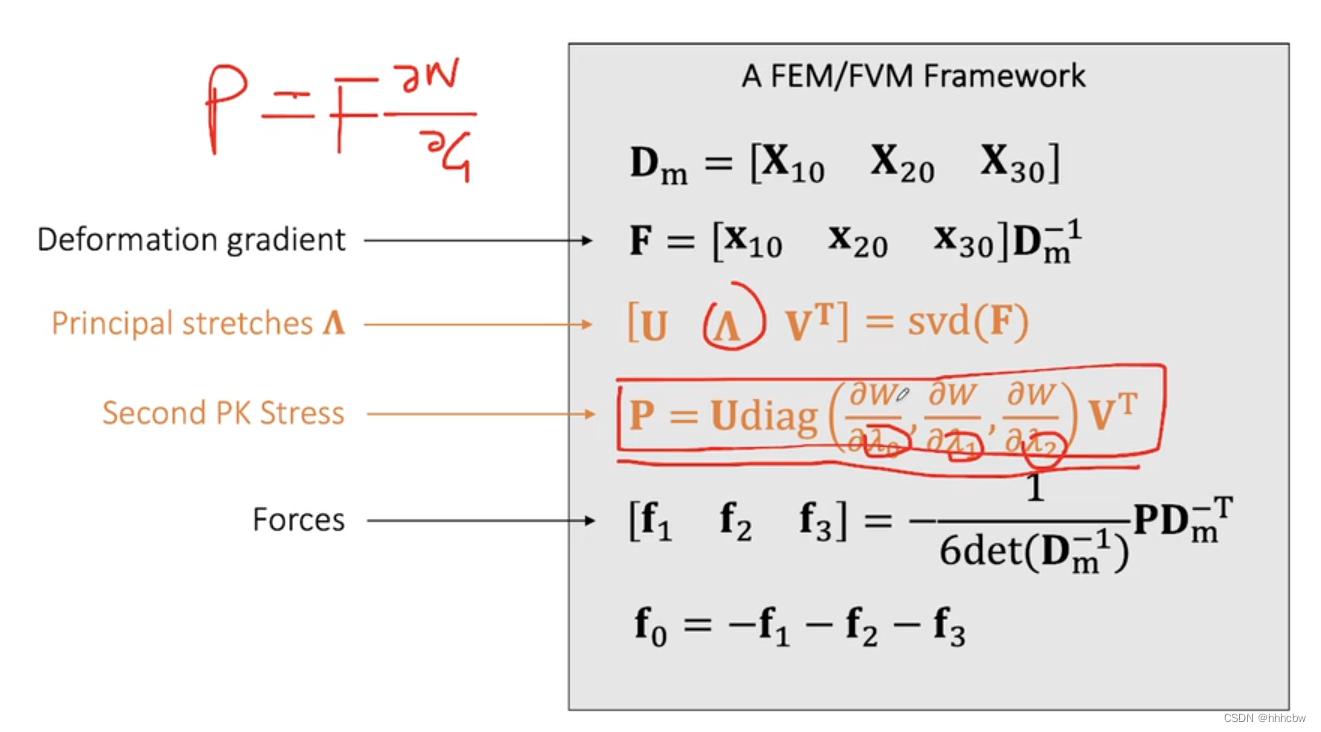
算法流程
这里就是使用SVD分解F,利用上面公式计算 P,这里可以替换不同的 W 以更换不同的模型
代码
W 对
λ
\lambda
λ 求偏导结果如下
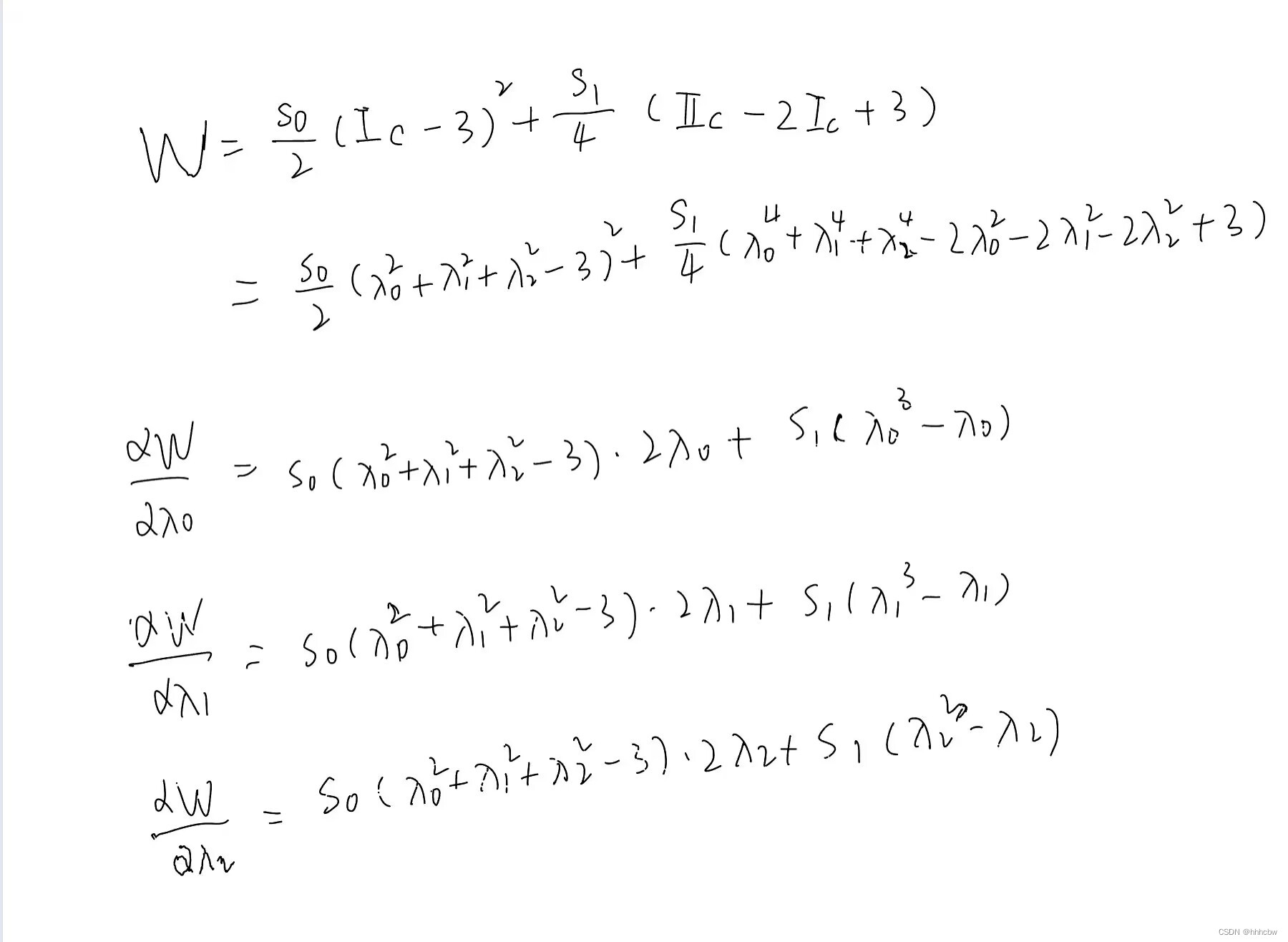
核心代码如下,在前面需要把 stiffness_0 改为 5000.0f
// Hyperelastic Models
for (int tet = 0; tet < tet_number; tet++)
{
//TODO: Deformation Gradient
Matrix4x4 F = Build_Edge_Matrix(tet) * inv_Dm[tet];
F[3, 3] = 1.0f;
//TODO: Green Strain
Matrix4x4 U = new Matrix4x4();
Matrix4x4 S = new Matrix4x4();
Matrix4x4 V = new Matrix4x4();
svd.svd(F, ref U, ref S, ref V);
//TODO: First PK Stress
Matrix4x4 P = new Matrix4x4();
Matrix4x4 Diag = new Matrix4x4();
float sum2 = S[0, 0] * S[0, 0] + S[1, 1] * S[1, 1] + S[2, 2] * S[2, 2] - 3.0f;
Diag[0, 0] = stiffness_0 * sum2 * 2.0f * S[0, 0] + stiffness_1 * (S[0, 0] * S[0, 0] * S[0, 0] - S[0, 0]);
Diag[1, 1] = stiffness_0 * sum2 * 2.0f * S[1, 1] + stiffness_1 * (S[1, 1] * S[1, 1] * S[1, 1] - S[1, 1]);
Diag[2, 2] = stiffness_0 * sum2 * 2.0f * S[2, 2] + stiffness_1 * (S[2, 2] * S[2, 2] * S[2, 2] - S[2, 2]);
U[3, 3] = Diag[3, 3] = V[3, 3] = 1.0f;
P = U * Diag * V.transpose;
//TODO: Elastic Force
float volume = 1.0f / (inv_Dm[tet].determinant * 6);
Matrix4x4 Elastic_force = Matrix4x4_mul_float(P * inv_Dm[tet].transpose, -volume);
for (int k = 0; k < 3; k++)
{
Force[Tet[tet * 4 + k + 1]].x += Elastic_force[0, k];
Force[Tet[tet * 4 + k + 1]].y += Elastic_force[1, k];
Force[Tet[tet * 4 + k + 1]].z += Elastic_force[2, k];
}
// Elastic_force0 = -Elastic_force1-Elastic_force2-Elastic_force3
Force[Tet[tet * 4 + 0]].x -= Elastic_force[0, 0] + Elastic_force[0, 1] + Elastic_force[0, 2];
Force[Tet[tet * 4 + 0]].y -= Elastic_force[1, 0] + Elastic_force[1, 1] + Elastic_force[1, 2];
Force[Tet[tet * 4 + 0]].z -= Elastic_force[2, 0] + Elastic_force[2, 1] + Elastic_force[2, 2];
}
结果
因为使用了 SVD,导致仿真速度变慢















 482
482











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









