










在ADS中进行稳定性分析(以避免K稳定性因子的局限性)-理论部分
在进行MMIC设计时,我使用经典的K因子进行稳定性判断。但是总是非常疑惑,好像高增益和稳定性不能兼得一样。即使晶体管栅长也不大,加上稳定电路增益都不到10dB了(让K因子大于1),不加能有15dB的样子,真的是难受。因此专门来学习研究一下功放稳定性的理论,并记录。
这部分理论对我还是非常难懂的,主要是自动控制部分的理论,当初没有学习过。
参考:https://www.youtube.com/watch?v=kVPzU7Eszk4&t=300s
推荐学习视频:13_奈奎斯特稳定性判据
ADS工程的官方下载链接:How to Design a Stable High Frequency Amplifier
需要我的ADS工程可以在评论区留言,只是在原来基础上小改了一下,不过大家估计不感兴趣。
1、K稳定性因子的局限性
K稳定性因子文章:Instabilities diagnosis and the role of K in microwave circuits
K因子可以依据S参数进行计算,满足以下条件即为绝对稳定:
K
=
1
−
∣
S
11
∣
2
−
∣
S
11
∣
2
+
∣
Δ
∣
2
2
∣
S
12
S
21
∣
>
1
K=\frac{1-|S_{11}|^2-|S_{11}|^2+|\Delta|^2}{2|S_{12}S_{21}|}>1
K=2∣S12S21∣1−∣S11∣2−∣S11∣2+∣Δ∣2>1
其中:
Δ
=
∣
S
11
S
22
−
S
12
S
21
∣
<
1
\Delta=|S_{11}S_{22}-S_{12}S_{21}|<1
Δ=∣S11S22−S12S21∣<1
在功率放大器的设计中,很多人都只使用K稳定性因子来判断稳定性,比如之前的设计案例:
宽带Doherty放大器ADS仿真(带版图)、ADS使用记录之AB类功放设计、ADS使用记录之超宽带功放设计、ADS使用记录之功率放大器设计等等。
但是,K稳定性因子具备局限性。只有原本的电路在开路、短路情况都稳定的时候,K因子的计算才能用于判断稳定性,原文见Stability and Power-Gain Invariants of Linear Twoports:
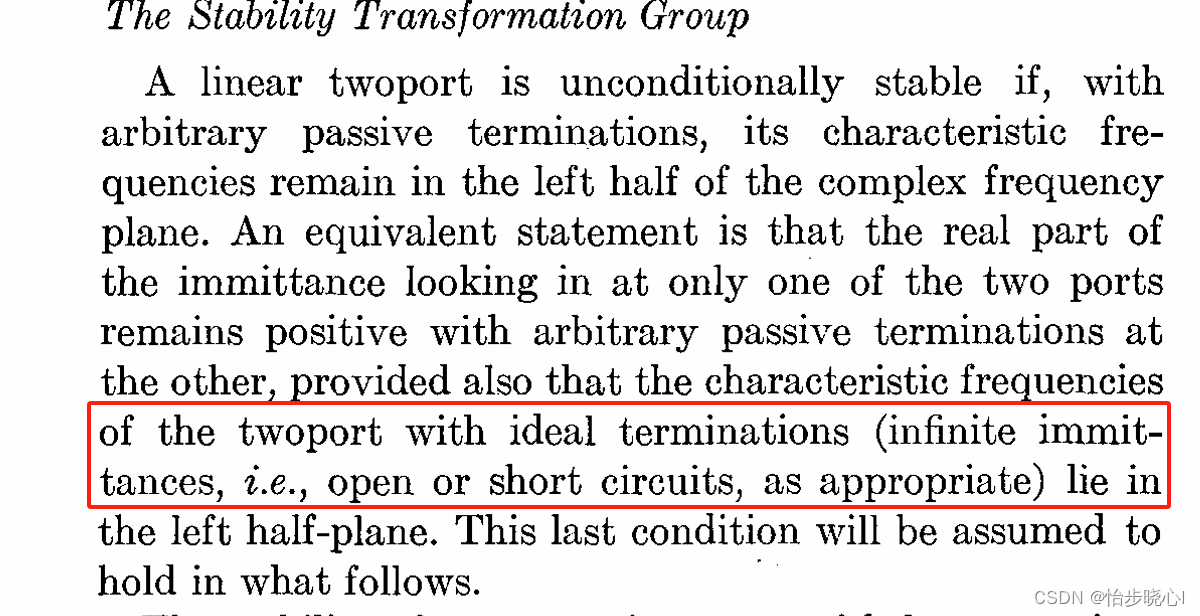
因此,K因子用在实际的稳定性测试时更加准确,用在设计阶段是缺乏说服力的。
在实际测试时,我们可以先测量开路、短路是否稳定,然后使用S参数计算稳定性因子来判断电路在一个频段内是否绝对稳定。
在电路设计仿真时,使用K因子判断,需要默认电路在开路、短路情况下稳定,这样不严谨。
2、反馈系统的稳定性判定简易案例
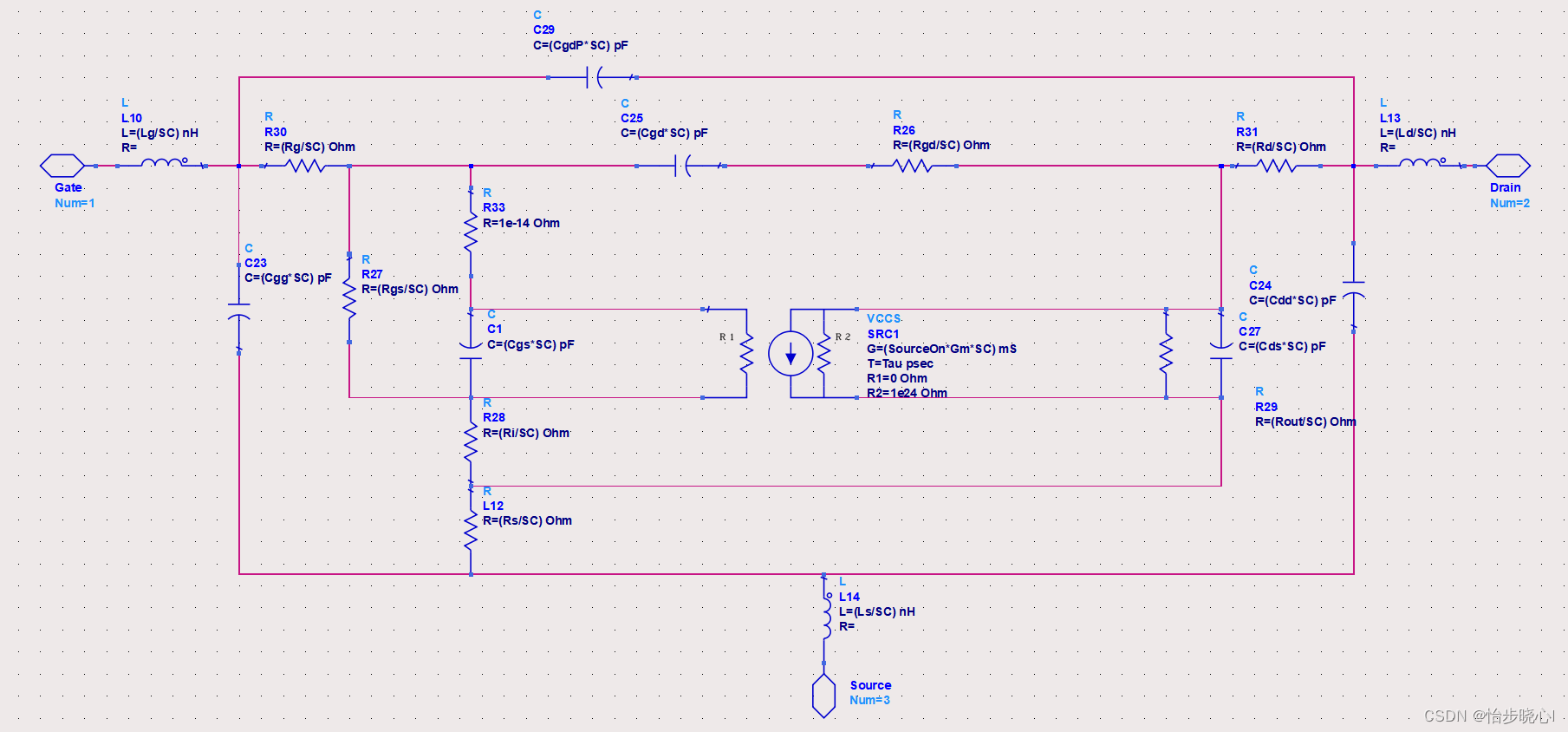
在进行运算放大器、功率放大器电路的设计时,都需要进行稳定性分析,这样的系统往往都是反馈系统。可能有人以为自己没有额外在电路系统中引入反馈,但是在射频系统中反馈是无处不在的,例如微带线之间的耦合、非线性器件内部的响应等等。理想的放大器也并非单纯的电流源,存在许多内部环路:
2.1、不稳定的简单案例
对于下面的一个简单放大器的反馈系统,我们可以计算其闭环增益(Closed-loop gain, Acl)如下图所示:
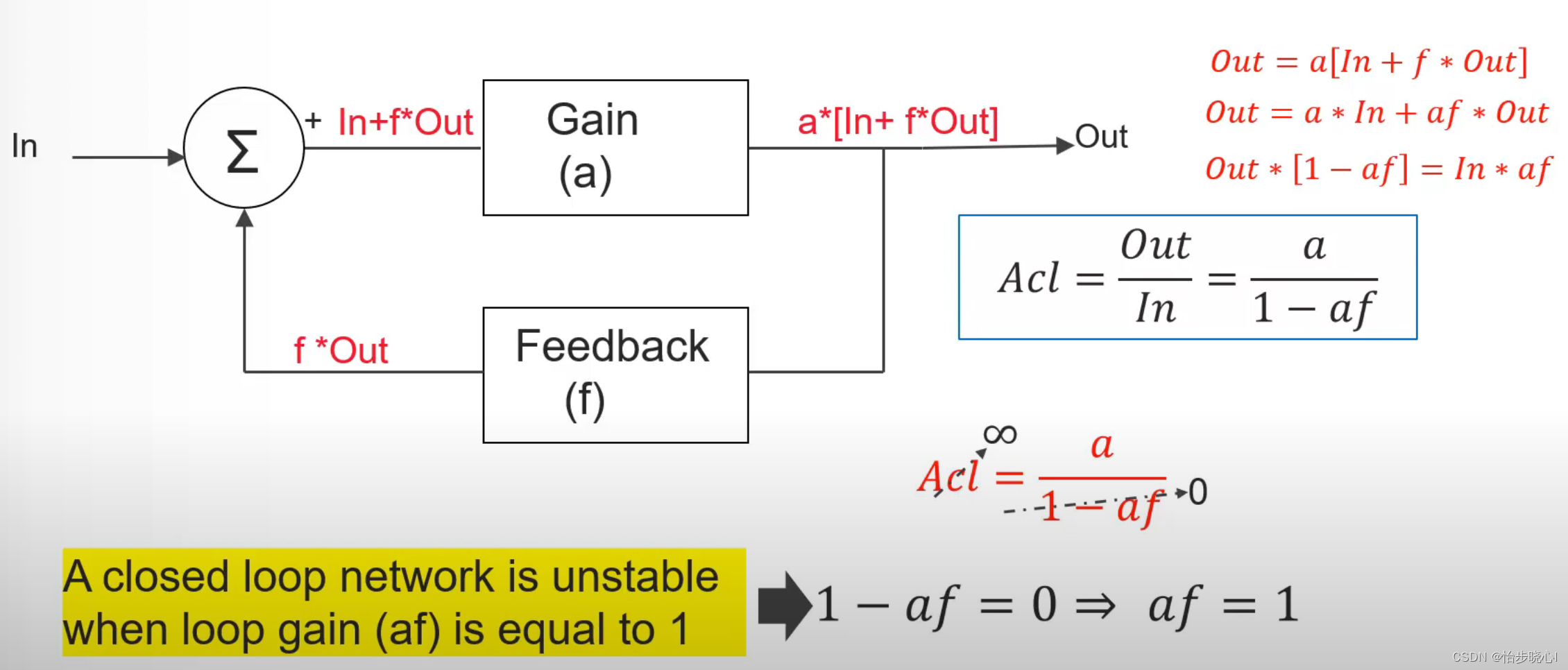
显然,闭环增益Acl是用下式计算的:
A
c
l
=
O
u
t
I
n
=
a
1
−
a
f
Acl=\frac{Out}{In}=\frac{a}{1-af}
Acl=InOut=1−afa
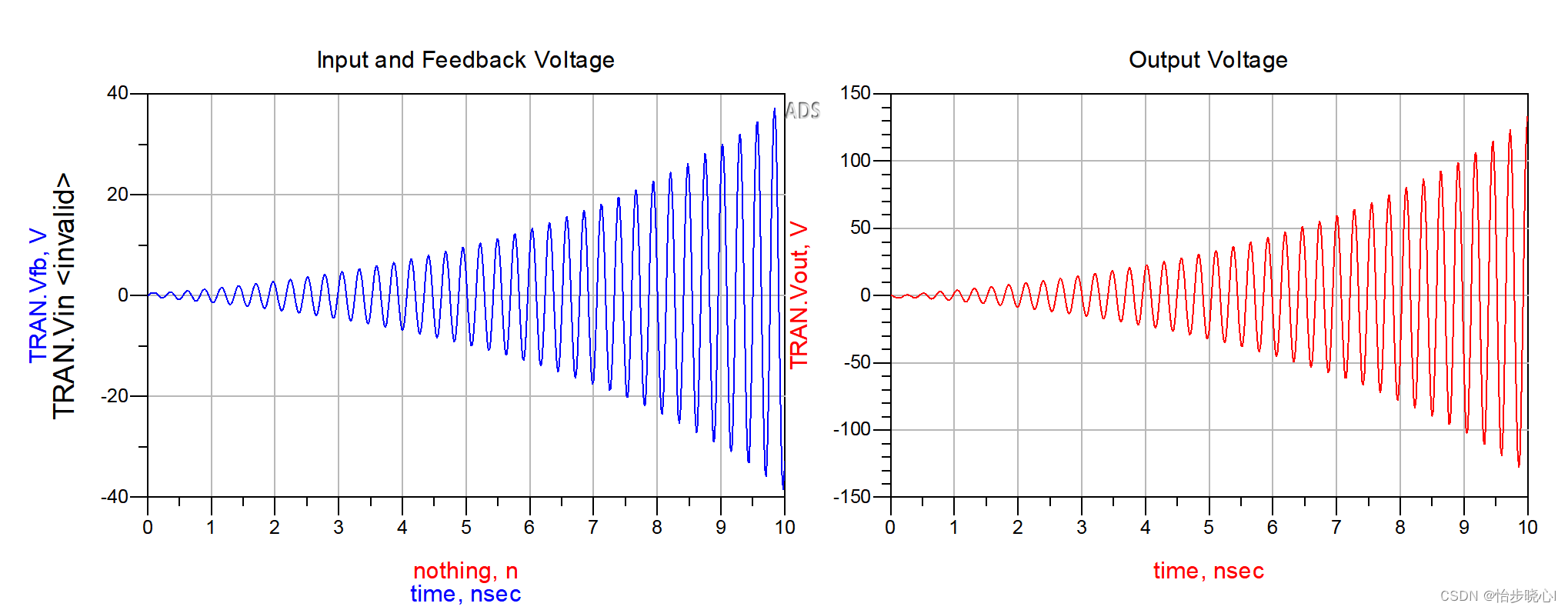
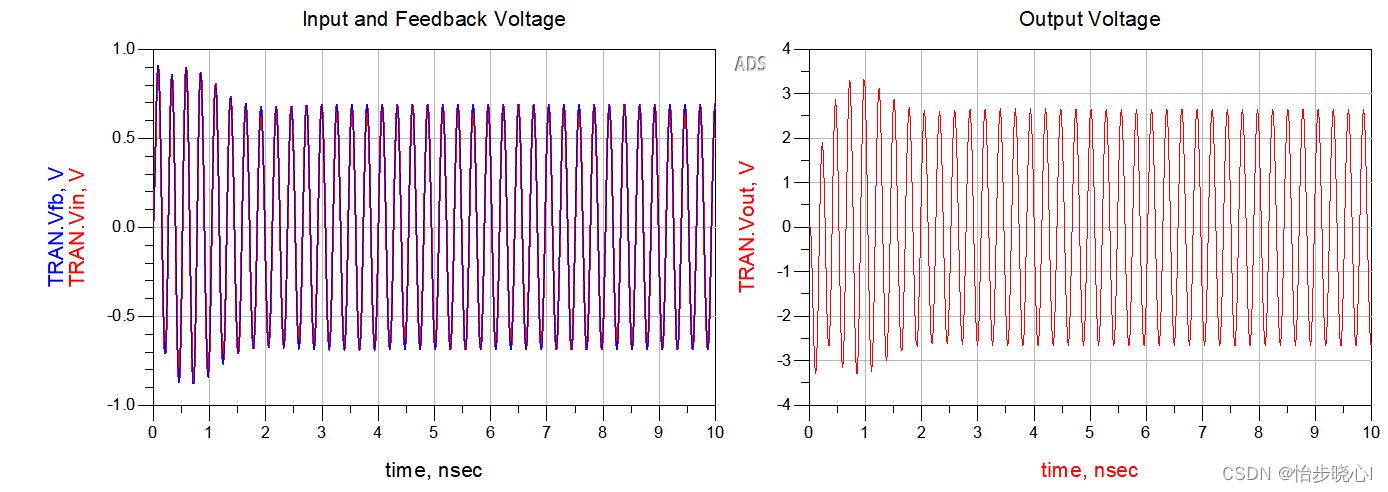
当1-af=0时,系统的闭环增益为无穷大,由此造成了不稳定现象。
更加直观一点,举个例子:
- 假设一开始输入是幅度为1的正弦波,反馈回来的信号是同相的原信号1/10幅度;
- 那么第二次环路实际的输入是1.1,反馈回来的信号是同相的原信号1/10幅度也就是0.11;
- 那么第三次环路实际的输入是1.21,这样依次循环,输出就会越来越大,造成不稳定。
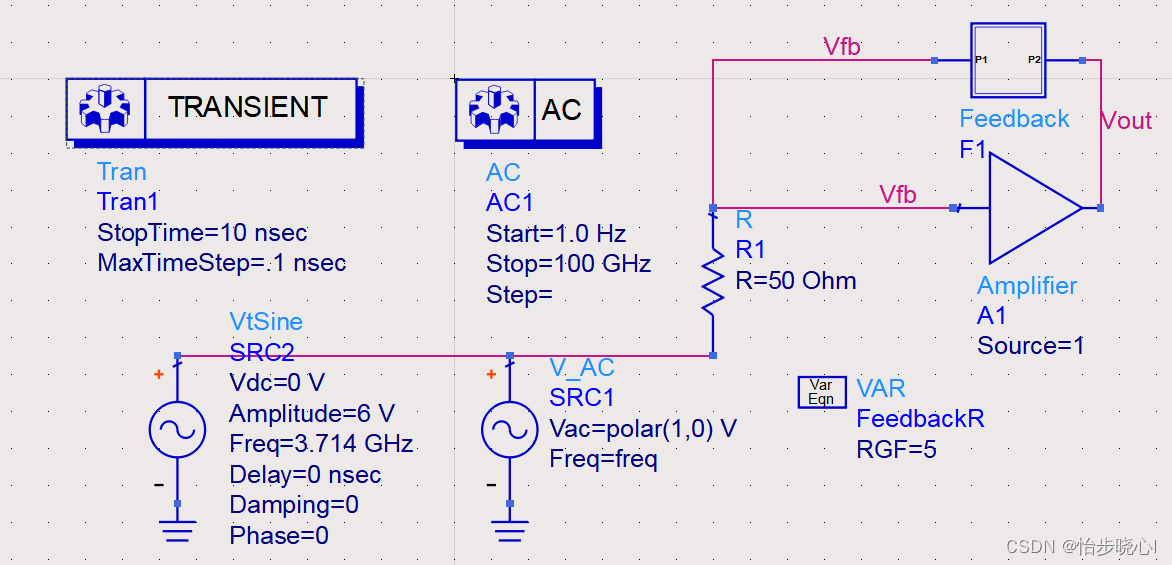
为充分说明系统不稳定反馈的影响,运行ADS工程中的02_Transient_AC,得到的实际的效果就是:
2.2、从Laplace域判断稳定性的简单例子
闭环增益ACL一般都是使用Laplace域来进行表征的,如:
A
c
l
(
s
)
=
A
(
s
)
1
−
A
(
s
)
F
(
s
)
Acl(s)=\frac{A(s)}{1-A(s)F(s)}
Acl(s)=1−A(s)F(s)A(s)
简单回顾一下Laplace变换公式,如下:
F
(
s
)
=
∫
0
∞
f
(
t
)
e
−
s
t
d
t
F(s)=\int_0^\infty f(t)e^{-st}dt
F(s)=∫0∞f(t)e−stdt
当然,还有一个延迟性质的变换需要回顾:
e
a
t
⇔
1
s
−
a
e^{at}\Leftrightarrow\frac1{s-a}
eat⇔s−a1
那么闭环增益ACL可以写成下面的形式:
A
c
l
(
s
)
=
A
(
s
)
1
−
A
(
s
)
F
(
s
)
=
(
s
−
z
1
)
(
s
−
z
2
)
.
.
.
(
s
−
p
1
)
(
s
−
p
2
)
.
.
.
Acl(s)=\frac{A(s)}{1-A(s)F(s)}=\frac{(s-z1)(s-z2)...}{(s-p1)(s-p2)...}
Acl(s)=1−A(s)F(s)A(s)=(s−p1)(s−p2)...(s−z1)(s−z2)...
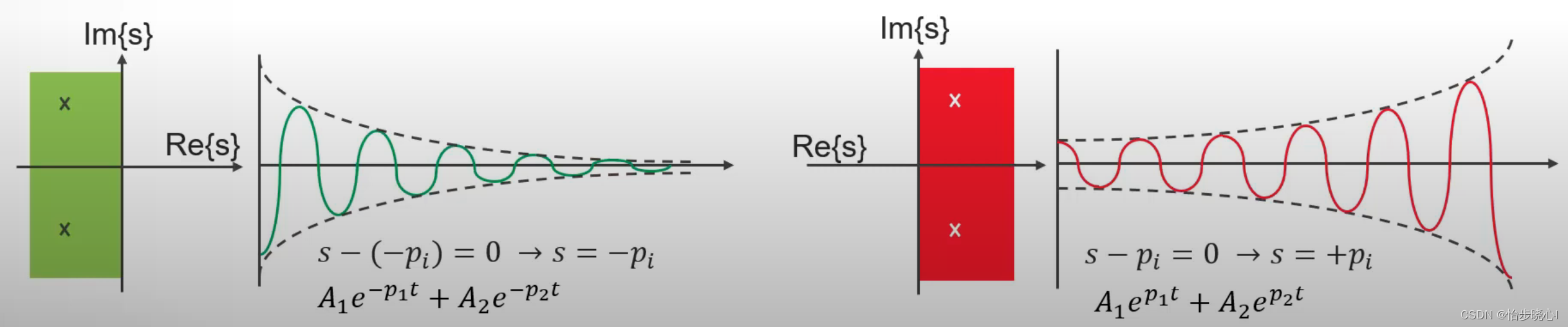
假设一个简单的形式,我们使用延迟性质的变换分离极点并转换到时域:
K
(
s
−
p
1
)
(
s
−
p
2
)
=
A
1
(
s
−
p
1
)
+
A
2
(
s
−
p
2
)
⇔
A
1
e
p
1
t
+
A
2
e
p
2
t
\frac{K}{(s-p1)(s-p2)}=\frac{A_{1}}{(s-p_{1})}+\frac{A_{2}}{(s-p_{2})}\Leftrightarrow A_{1}e^{p_{1}t}+A_{2}e^{p_{2}t}
(s−p1)(s−p2)K=(s−p1)A1+(s−p2)A2⇔A1ep1t+A2ep2t
那么,如果拥有右半平面的极点,p就会大于0,那么最终的结果就会指数发散,如下图右侧:
3、柯西幅角定理
3.1、反馈系统的框图和开环传递函数
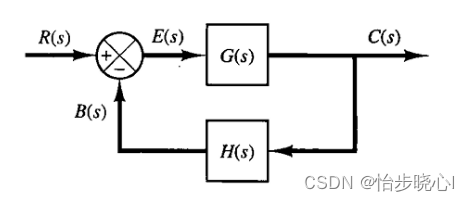
反馈系统的框图和开环传递函数如下,参考[1](美)KATSUHIKO OGATA著;卢伯英,佟明安译. 现代控制工程 第5版[M]. 北京:电子工业出版社, 2017.05.:
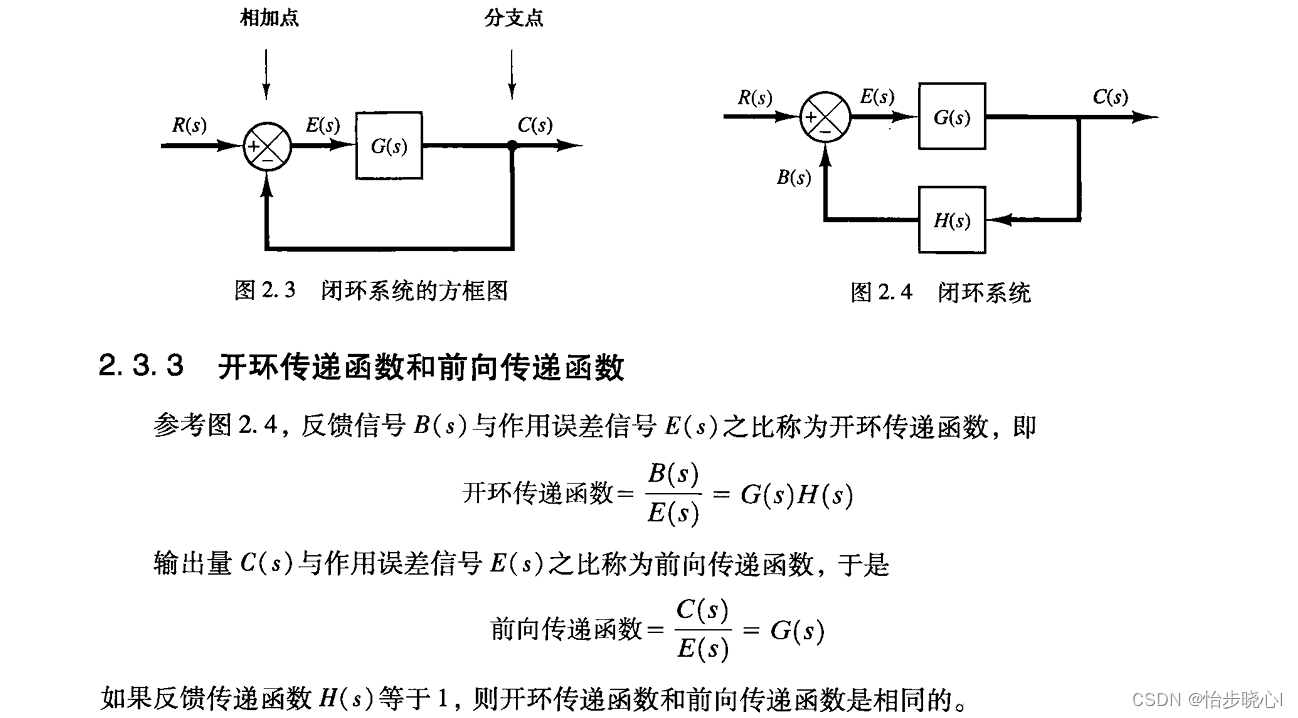
对于上图的一般框图,类似可得闭环增益Acl(闭环传递函数)如下,其中分母的正负和2.1小节的不同,这是因为两个框图的相加点的符号不同罢了,实际是一致的:
A
c
l
=
ϕ
(
s
)
=
G
(
s
)
1
+
G
(
s
)
H
(
s
)
Acl=\phi(s)=\frac{G(s)}{1+G(s)H(s)}
Acl=ϕ(s)=1+G(s)H(s)G(s)
3.2、柯西幅角原理
这部分参考:奈奎斯特稳定性判据的详细推导
这位博主写的非常详细了,对小白非常友好,我这边搬点过来,hihi
3.2.1 F(s)的相角变化
先问一个问题:当s从闭合曲线 Γ 上任意一点顺时针沿 Γ 运动一周后,F(s)的相角变化了多少?
我们以一个简单的传递函数为例:
F
(
s
)
=
s
−
(
2
+
2
j
)
\mathrm{F~(s)=s-(2+2j)}
F (s)=s−(2+2j)
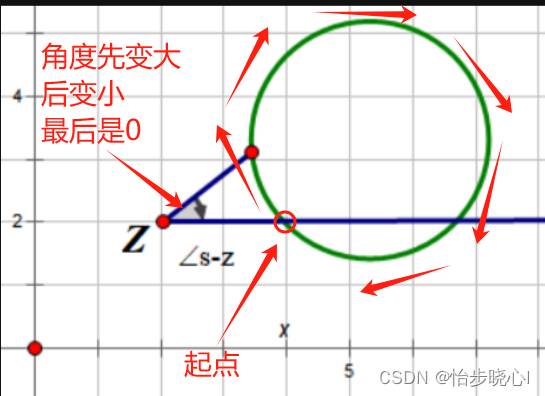
其中传递函数的零点为 z = 2 + 2j,F(s)的相角变化就是 ∠(s - z) 积累的角度,以下根据闭环曲线 Γ 与零点Z的关系分成两种情况讨论:
①若选取的闭环曲线 Γ 未包含 z = 2 + 2j ,那么随着点s在闭环曲线上运动一周,我们以z为原点建立坐标系,发现 ∠s - z 最后没有积累角度,F(s)的相角变化为0 。可以发现,这个角度实际上是先变大后变小的,最后回到0,相当于转了半天白干了:
②若选取的闭环曲线 Γ 包含 z = 2 + 2j ,那么随着点s在闭环曲线上运动一周,s回到了原来位置上,但此时 ∠s - z 顺时针积累了2π的角度,F(s)的 相角变化为2π。虽然最后也回到了起点,但是实际上是转了一圈:
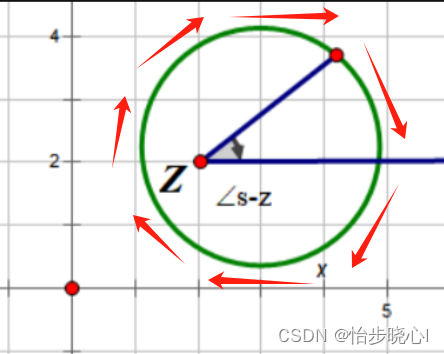
所以我们得到结论:
- 对于闭合曲线 Γ 外的零点和极点,对应的相角变化为0
- 对于闭合曲线 Γ 内的零点和极点,对应的相角变化为2π
注:闭合曲线 Γ 不通过F(s)的任一零、极点。F(s)的零、极点要么在曲线里面,要么在曲线外面
3.2.2 拓展至多个零点、极点
传递函数同时有零点、极点,如何分析F(s)的相角变化?假设:
F
(
s
)
=
(
s
−
z
1
)
(
s
−
z
2
)
(
s
−
p
1
)
(
s
−
p
2
)
\mathrm{F~(s)=\frac{\left(s-z_1\right)\left(s-z_2\right)}{\left(s-p_1\right)\left(s-p_2\right)}}
F (s)=(s−p1)(s−p2)(s−z1)(s−z2)
F(s)可以化为:
A
z
1
A
z
2
A
p
1
A
p
2
e
(
φ
z
1
+
φ
z
2
−
(
φ
p
1
+
φ
p
2
)
)
\frac{\mathrm{A_{z_1}~A_{z_2}~}}{\mathrm{A_{p_1}~A_{p_2}~}}\mathrm{e^{(\varphi^{z_1}~+\varphi^{z_2}~-(\varphi^{p_1}~+\varphi^{p_2}~))}}
Ap1 Ap2 Az1 Az2 e(φz1 +φz2 −(φp1 +φp2 ))
于是我们可以得到F(s)的相角变化:
δ
∠
F
(
s
)
=
δ
∠
(
s
−
z
1
)
+
δ
∠
(
s
−
z
2
)
−
δ
∠
(
s
−
p
1
)
−
δ
∠
(
s
−
p
2
)
\mathrm{\delta\angle F~(s)=\delta\angle (s-z_1)~+\delta\angle (s-z_2)~-\delta\angle (s-p_1)~-\delta\angle (s-p_2)}
δ∠F (s)=δ∠(s−z1) +δ∠(s−z2) −δ∠(s−p1) −δ∠(s−p2)
极点p1、p2作为分母,与零点z1、z2产生的相角变化相反
3.2.3 柯西幅角原理本体
F(s)绕平面原点的圈数只和F(s)被闭合曲线 Γ 包围F(s)的零点和极点的代数和有关
设F(s)有Z个零点和P个极点被 Γ 包围,则s沿曲线 Γ 顺时针运动一周时,F(s)变化的相角为 2π(P - Z),在F(s)平面上,闭合曲线 ΓF 逆时针包围原点的圈数为(也就是极点数减去零点数):
R
=
P
−
Z
\mathrm{R}=\mathrm{P}-\mathrm{Z}
R=P−Z
- R: ΓF 逆时针包围原点的圈数
- P:F(s)在s平面闭合曲线 Γ 内被包围的极点数
- Z:F(s)在s平面闭合曲线 Γ 内被包围的零点数
R > 0 和 R < 0分别表示 曲线ΓF 逆时针包围原点和顺时针包围原点的圈数,R = 0 表示曲线 ΓF 不包围原点
为什么是 ΓF 包围原点的圈数,而不是其它点呢?这段我也没搞懂,就直接背着了,原话是:
因为我们计算得到F(s)相角的变化为2π的整数倍,在F(s)平面中,要使F(s)对应的点变化的相角为2π的整数倍,那么闭合曲线 ΓF 里一定要包含原点,所以我们取包含原点的圈数
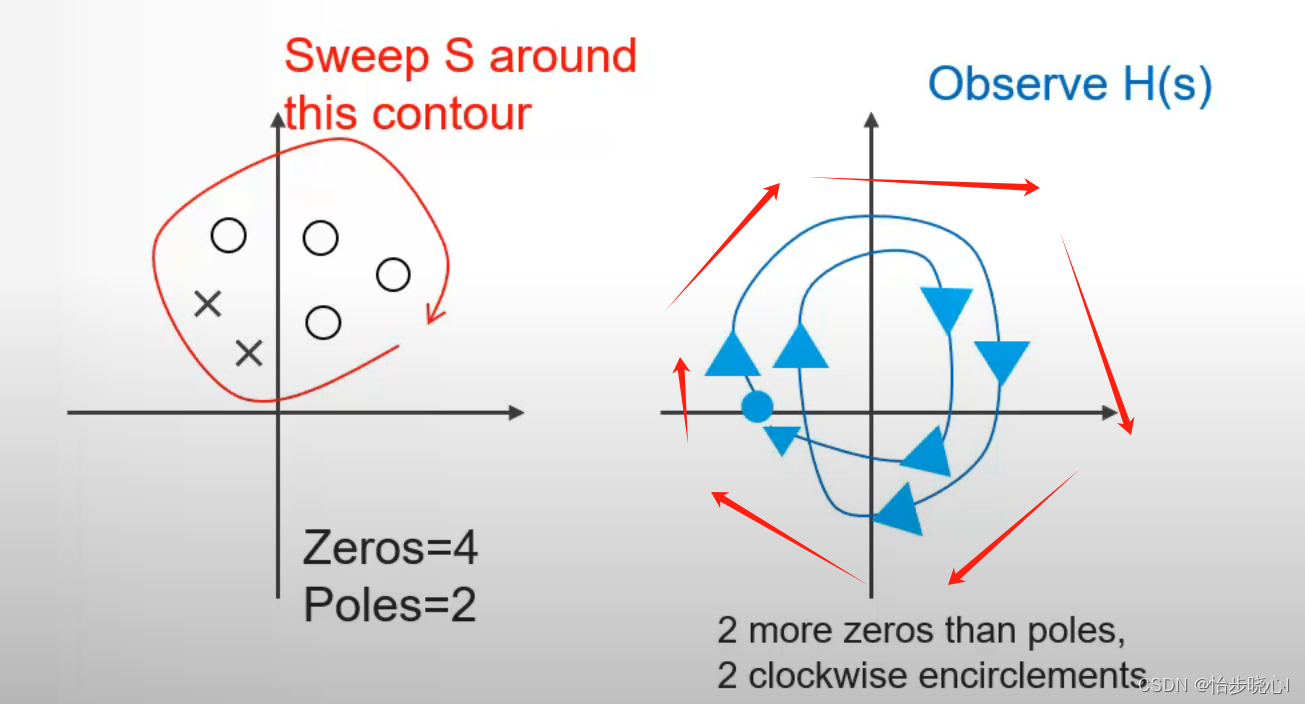
3.2.4 柯西幅角原理的简单示例
下面的例子,画个圈圈住了四个零点和两个极点,那么最终的F(s)的结果·就是
R
=
P
−
Z
=
−
2
\mathrm{R}=\mathrm{P}-\mathrm{Z}=-2
R=P−Z=−2,需要顺时针绕原点两圈,如右图所示:
4、基于环路增益的系统稳定性判断
如何将幅角原理与系统稳定性结合起来呢?在此进行分析
这部分参考:奈奎斯特稳定性判据的详细推导
4.1、选择合适的复变函数F(s)来表征系统
4.1.1、如何选择F(s)才能与系统稳定性结合
☆ F(s)选择成:
1
+
G
(
s
)
H
(
s
)
1+\mathrm{G(s)H(s)}
1+G(s)H(s)
为什么?1+G(s)H(s)有什么特殊意义吗?
对于这样一个负反馈系统:
其中:
G
(
s
)
=
s
+
2
s
+
5
,
H
(
s
)
=
1
s
+
4
\mathrm{G\left(s\right)=\frac{s+2}{s+5}}\quad,\quad\mathrm{H\left(s\right)=\frac{1}{s+4}}
G(s)=s+5s+2,H(s)=s+41
那么:
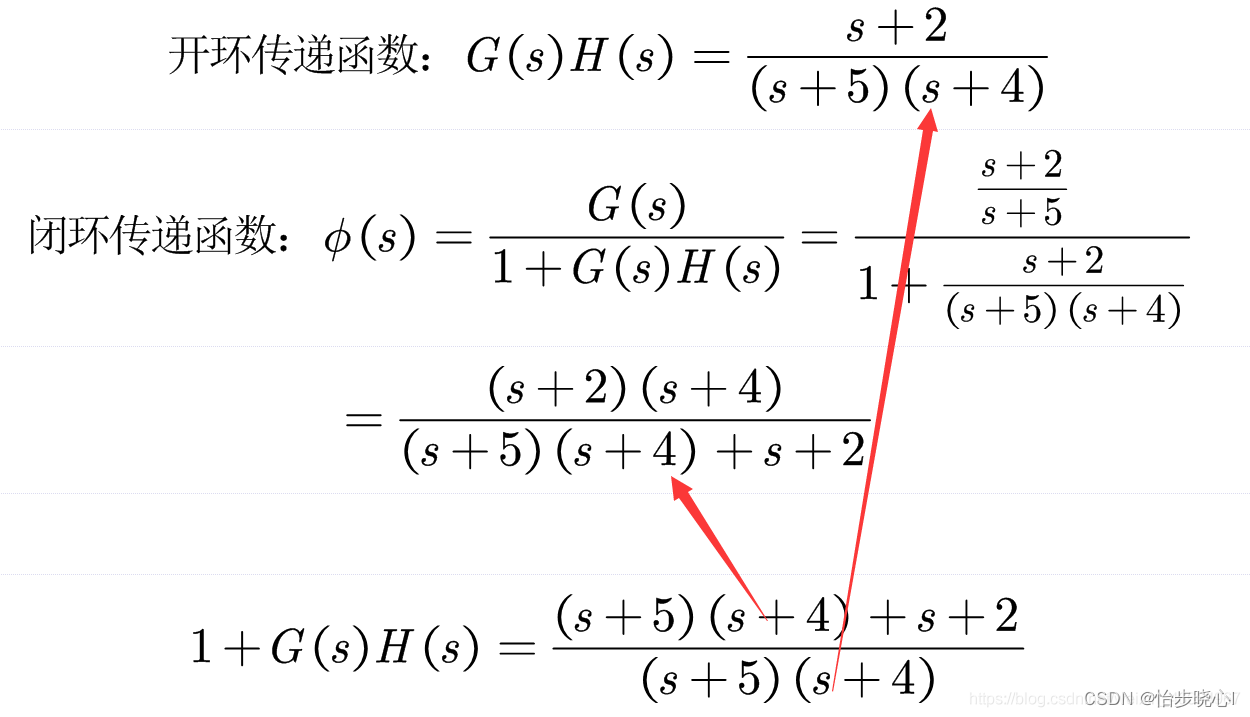
发现1+G(s)H(s)的分子分母具有特殊的意义:
▷1+G(s)H(s)的零点为闭环传递函数的极点
▷1+G(s)H(s)的极点为开环传递函数的极点
那么使用1+G(s)H(s)就可以同时包含开环传函和闭环传函的极点
4.1.2、 1+G(s)H(s) 的优点
在控制系统中是利用开环传递函数来判断闭环系统的稳定性的
若我们将s平面的闭合曲线 Γ 取成整个右半平面(我理解是因为右半平面的极点会导致不稳定性)
那么对于F(s)=1+G(s)H(s)来说,我们令F(s)在右半平面的零点数和极点数为 Z 和 P
如果右半平面中闭环传递函数的极点数为0,则系统稳定,即Z = 0 系统稳定
4.1.1中分析了,F(s)的极点为开环传递函数的极点,开环传输函数是已知的,即 P是已知的
在F(s)平面中,闭合曲线 ΓF 逆时针包围原点的圈数为:
R
=
P
−
Z
\mathrm{R}=\mathrm{P}-\mathrm{Z}
R=P−Z
至此,P、Z的意义转化为:
▷R: ΓF 逆时针包围原点的圈数
▷P:开环传递函数在右半平面内的极点数,P是已知的
▷Z:闭环传递函数在右半平面内的极点数,若Z = 0系统稳定
简单来说,我们已知F(s)的极点个数(,F(s)的极点为开环传递函数的极点,开环传输函数是已知的,即 P是已知的)。随后使用柯西幅角定理可以求得包围原点的圈数R,这样就能计算得到闭环传递函数在右半平面内的极点数 Z,进而进行稳定性判断。
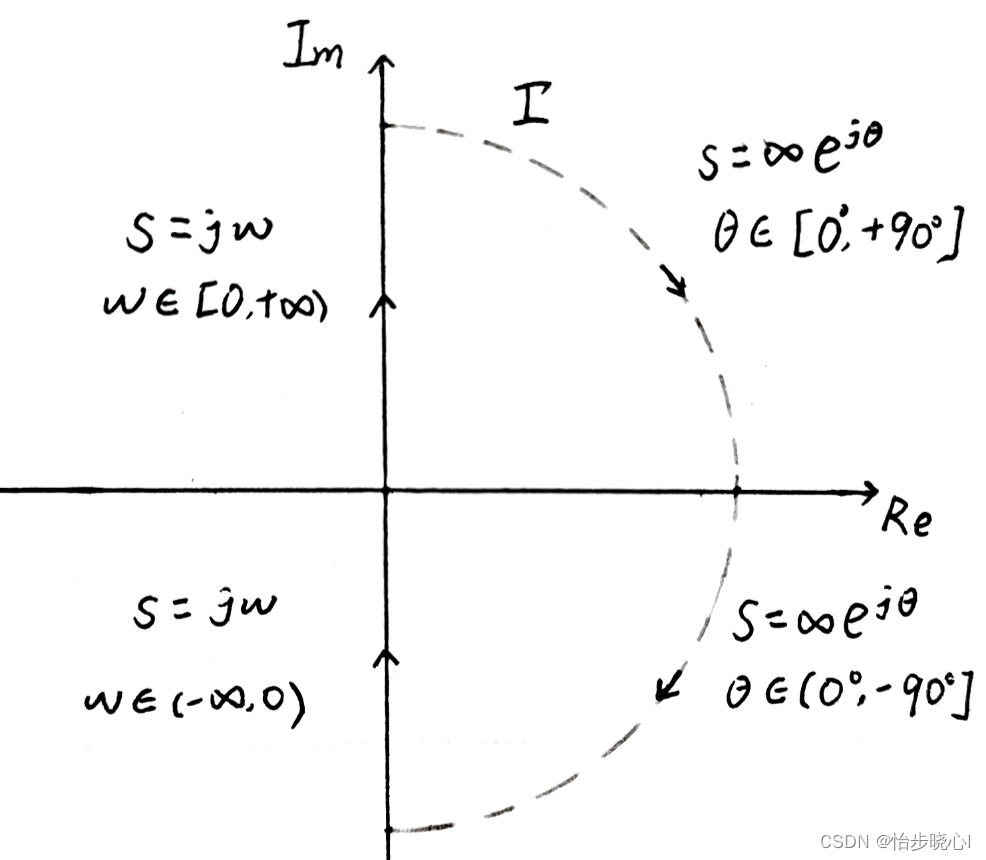
4.2、闭合曲线 Γ 的选择
我们只关注右半坐标轴的极点,因为这会带来不稳定。那么如何设计闭合曲线 Γ ,使得能取满整个右半平面?
幅角原理中要求闭合曲线 Γ 不通过 F(s)的任一零、极点,则 Γ 的选择与虚轴上有无零极点有关。
1. G(s)H(s) 无虚轴上的极点
我们以一个以原点为圆心,半径无穷大的半圆表示右半平面:
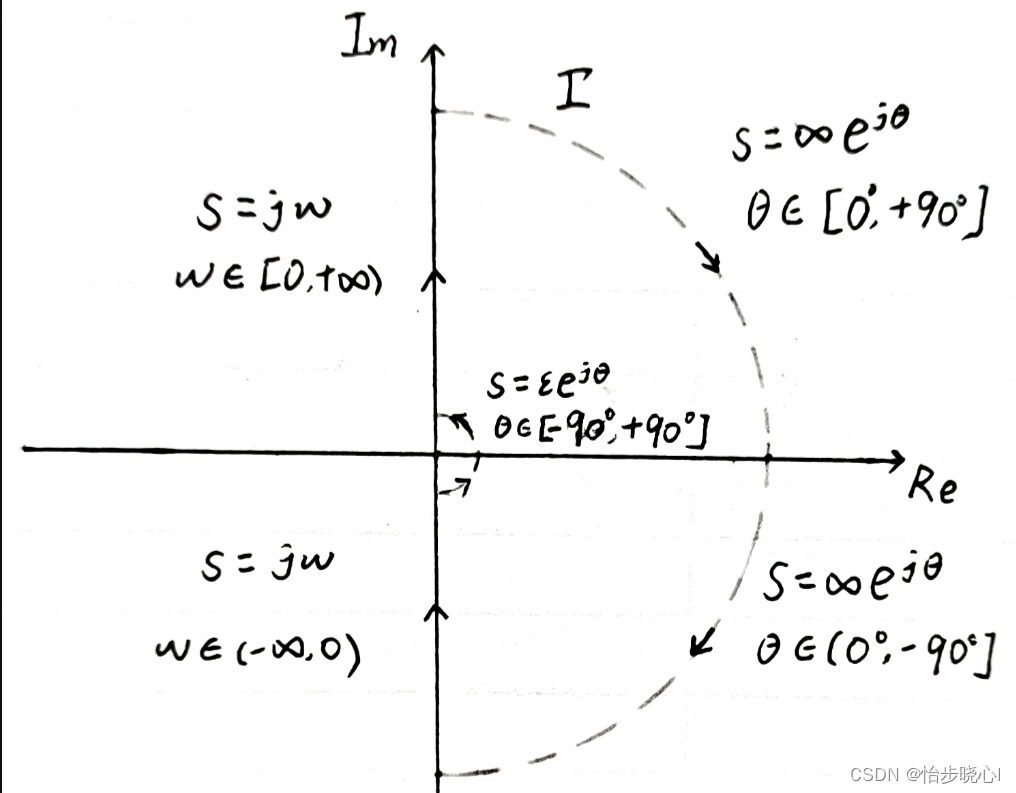
2. G(s)H(s) 有虚轴上的极点
若虚轴上有极点,为了避免闭合曲线 Γ 通过零、极点,我们可以想办法绕过去,则画一个半径无穷小的半圆绕过极点:
4.3、R的求取和实际的曲线绘制
R等于 ΓGH 逆时针包围F(s)平面 点(-1 , j0) 的圈数,那么我们将 ΓGH 画出来就可以计算R的大小了
这样选择无穷然后画⚪是比较书面的说法。假设我们已知了开环传输函数GH和s=jw这个简单的变换,我们可以让w从0到无穷,然后绘制出传输函数的实部虚部图:
clc
close all
clear
C=tf([1 1],[1 0.1]);
Sys=tf([1],[1 0.4 1]);
H=tf([1],[1 5]);
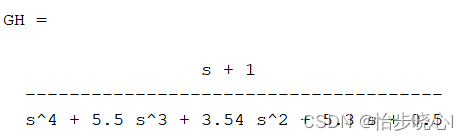
GH=C*Sys*H
% matlab自带的绘制函数
nyquist(GH)
% 自己对角度w进行扫描
w=0.001:0.001:10;
s=j*w;
my_GH=(s + 1)./(s.^4 + 5.5*s.^3 + 3.54*s.^2 + 5.3*s + 0.5);
figure
plot(real(my_GH),imag(my_GH))
hold on
w=-0.001:-0.001:-10;
s=j*w;
my_GH=(s + 1)./(s.^4 + 5.5*s.^3 + 3.54*s.^2 + 5.3*s + 0.5);
plot(real(my_GH),imag(my_GH))
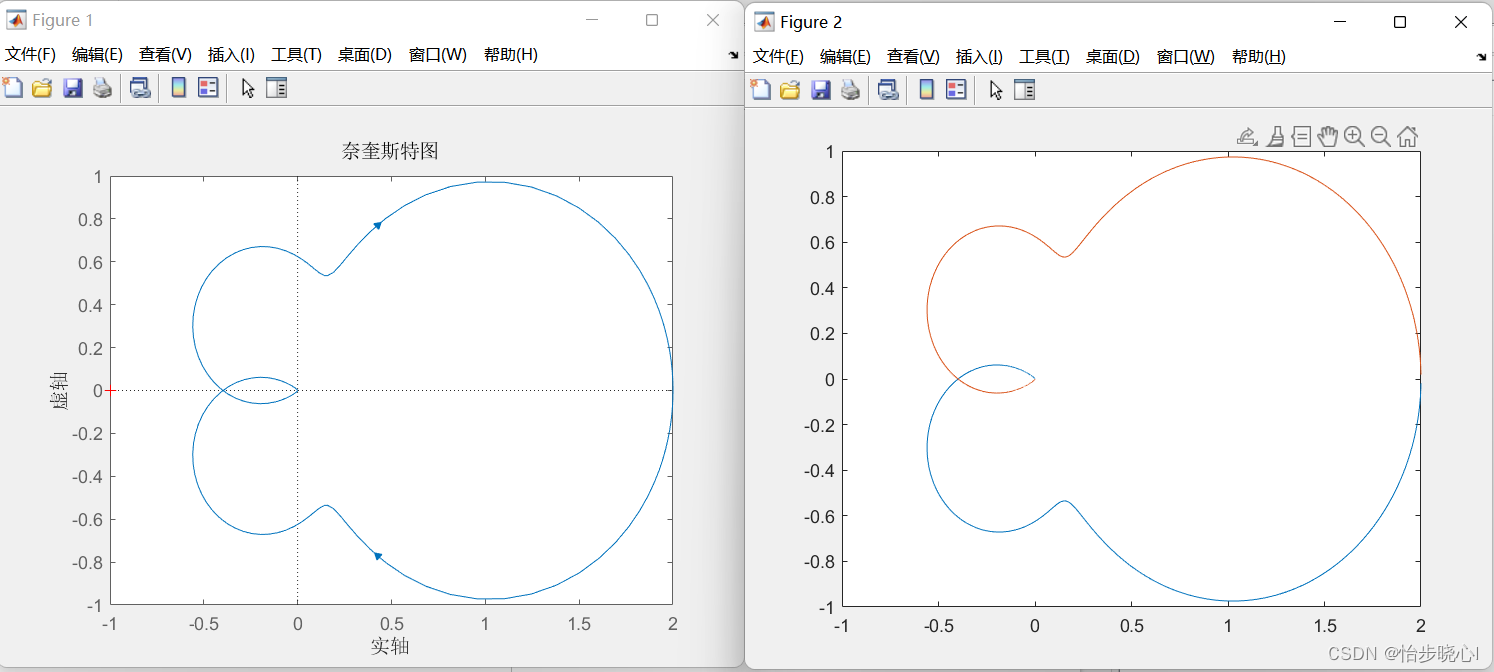
可以看到上面的图没有对 点(-1 , j0) 绕圈,因此系统R=0,而给出的函数GH没有右半平面的极点,因此P=0,从而系统稳定。
4.4、不稳定的例子
对上面的函数直接乘以5:

得到结果是顺时针绕了两圈,因此R=-2:

因此:
Z
=
P
−
R
=
0
+
2
=
2
\mathrm{Z}=\mathrm{P}-\mathrm{R}=0+2=2
Z=P−R=0+2=2
由于闭环传递函数在右半平面内的极点数,若Z = 0系统稳定,因此上面的系统是不稳定的。
4.5、在ADS中使用奈奎斯特稳定性判据-简单案例
4.5.1、不稳定案例
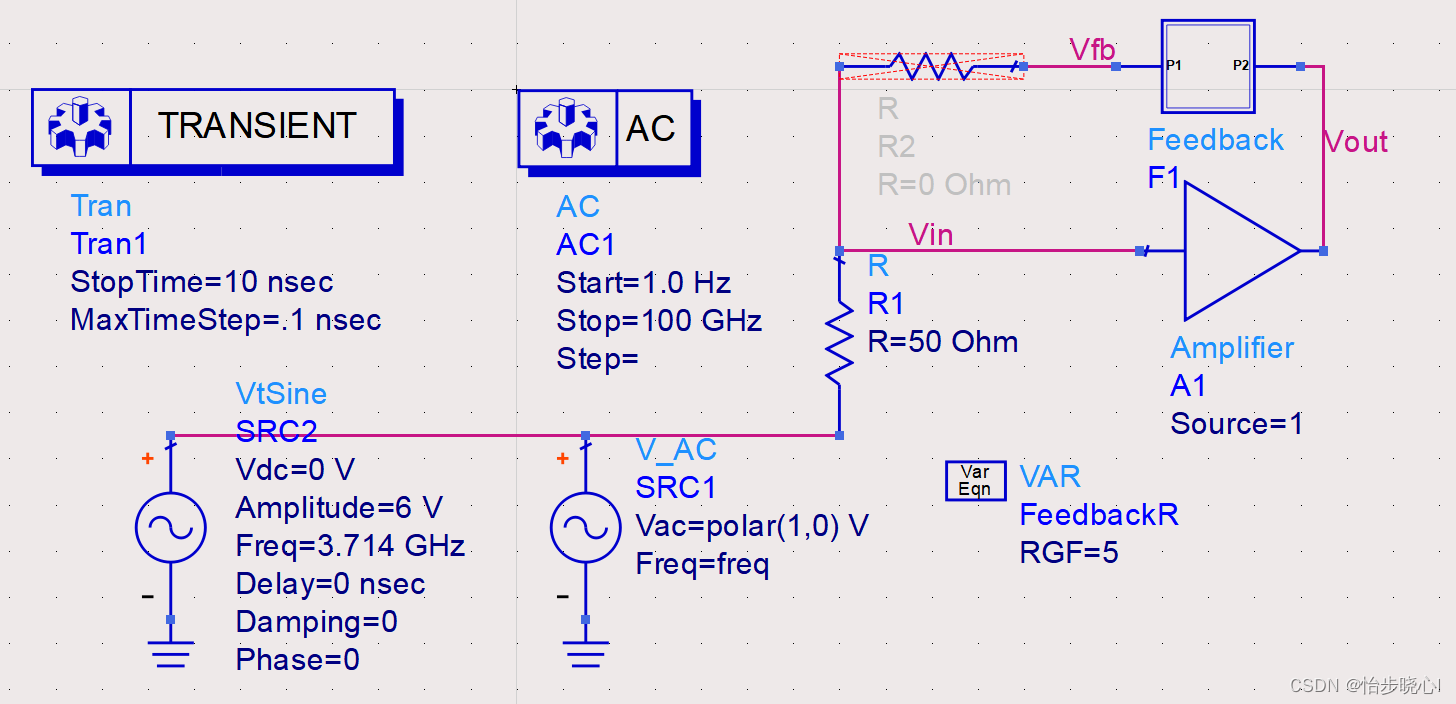
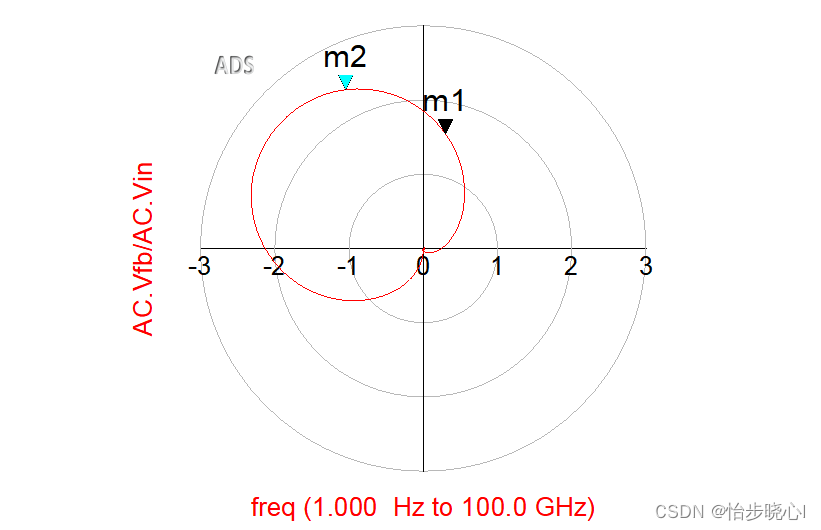
对于下面的系统,由于此处使用的是合路(上面第四部分的分析是输入和反馈相减),因此R等于 ΓGH 逆时针包围F(s)平面 点(1 , j0) 的圈数:
运行仿真,发现顺时针绕1有1圈的样子,因此R=-1:

对于上面的系统,仿真发现在开环时是稳定的,因此可以认为其没有在右半平面内的极点数P=0:
因此:
Z
=
P
−
R
=
0
+
1
=
1
\mathrm{Z}=\mathrm{P}-\mathrm{R}=0+1=1
Z=P−R=0+1=1
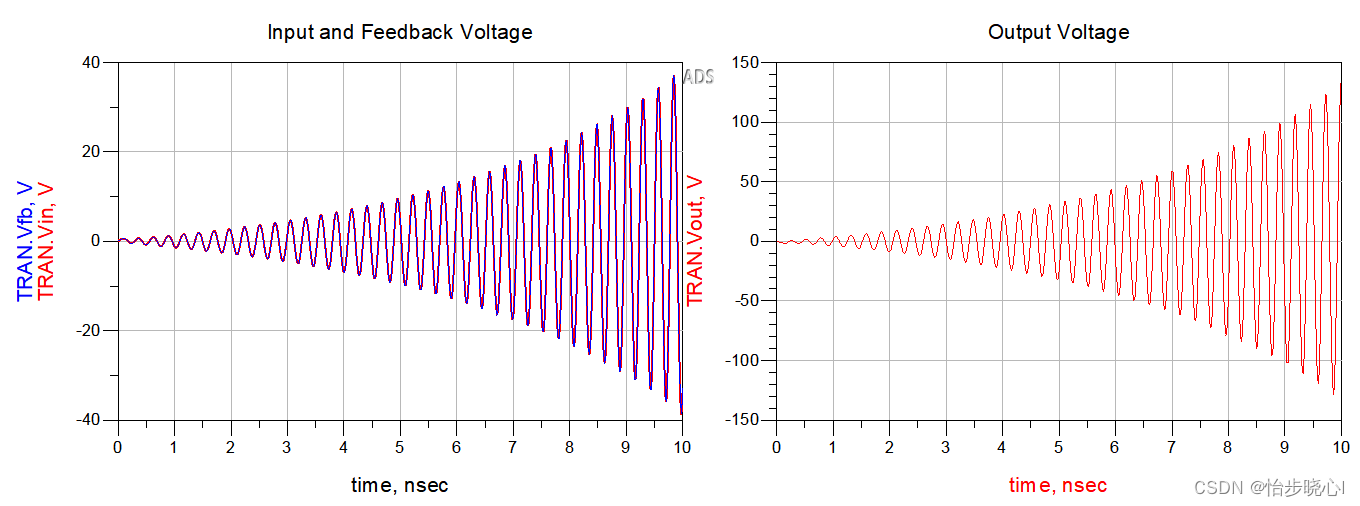
由于闭环传递函数在右半平面内的极点数,若Z = 0系统稳定,因此上面的系统是不稳定的。在ADS中将环路连接上去:
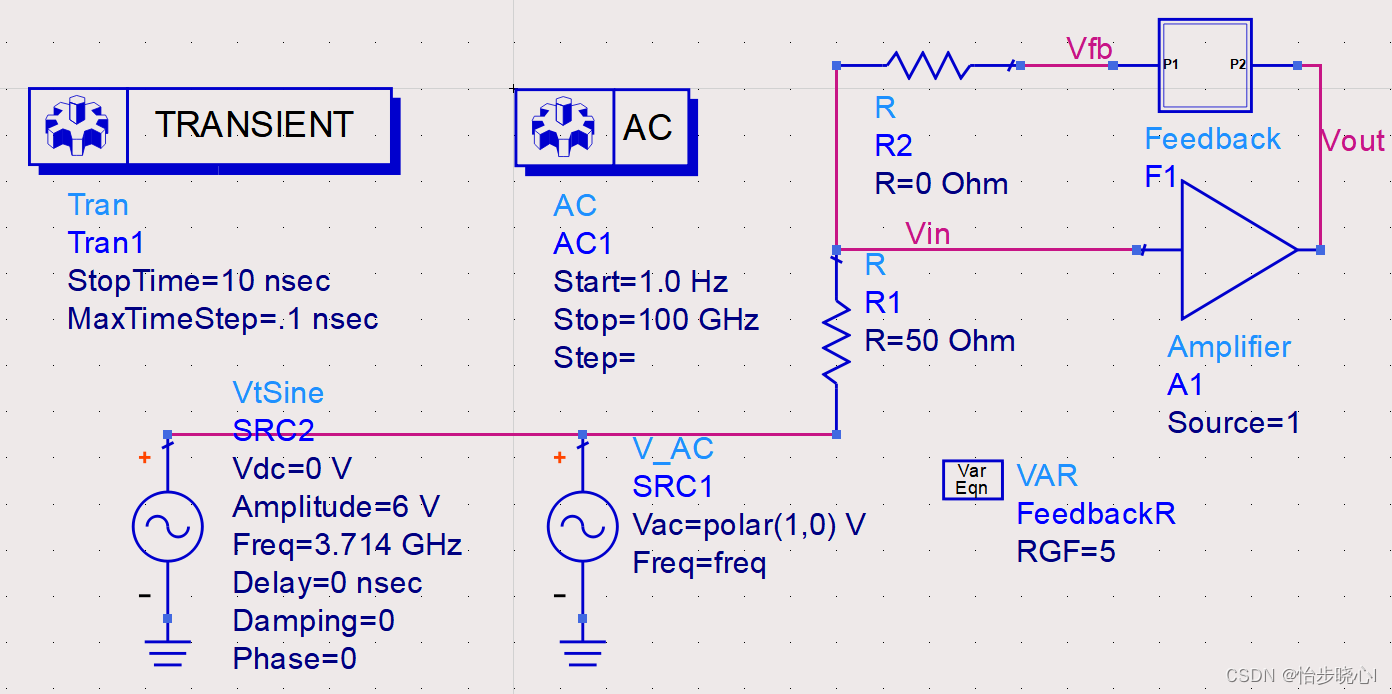
仿真发现是不稳定的,判断有效:
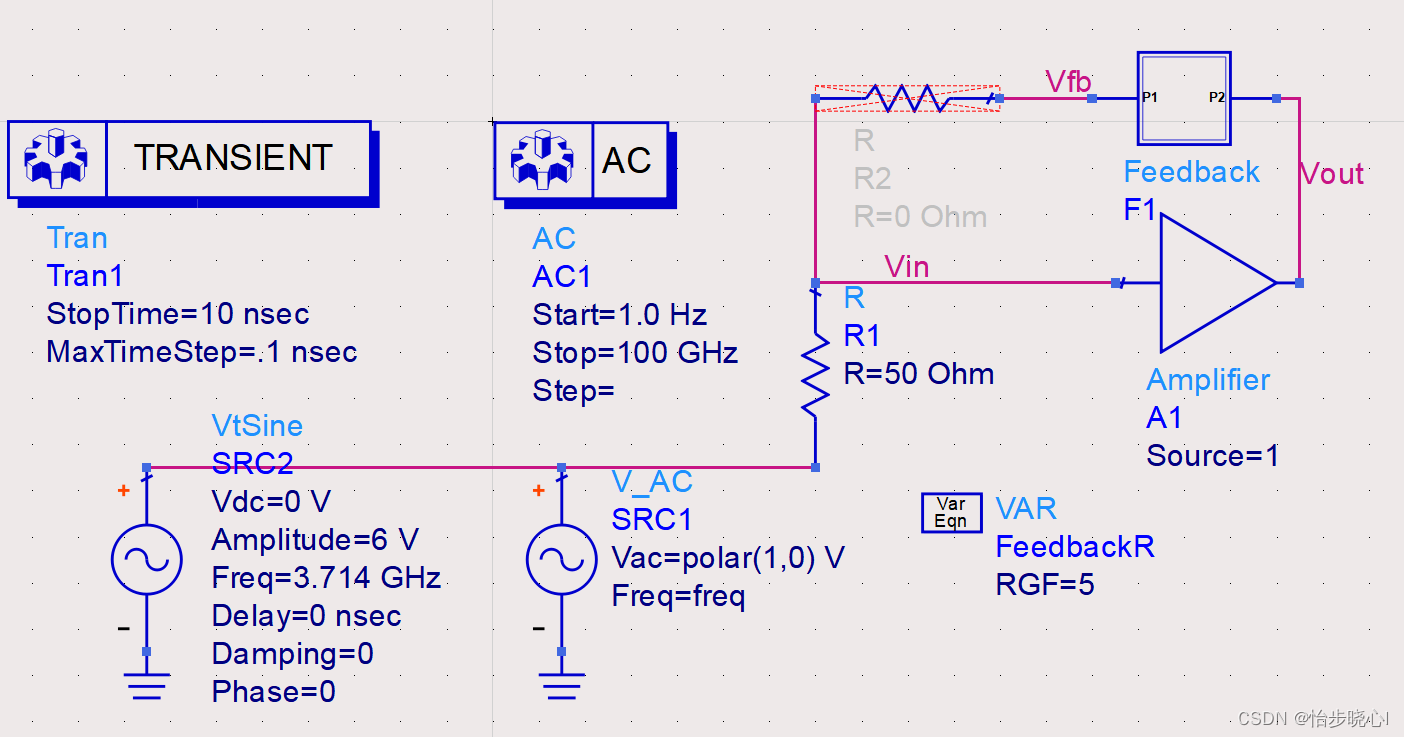
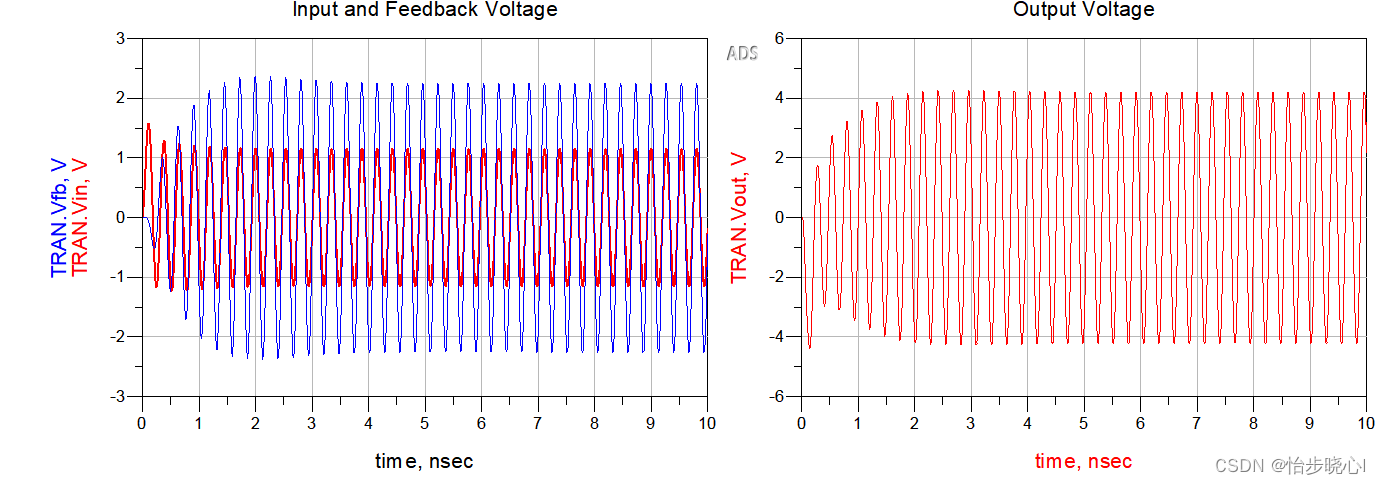
4.5.2、稳定案例
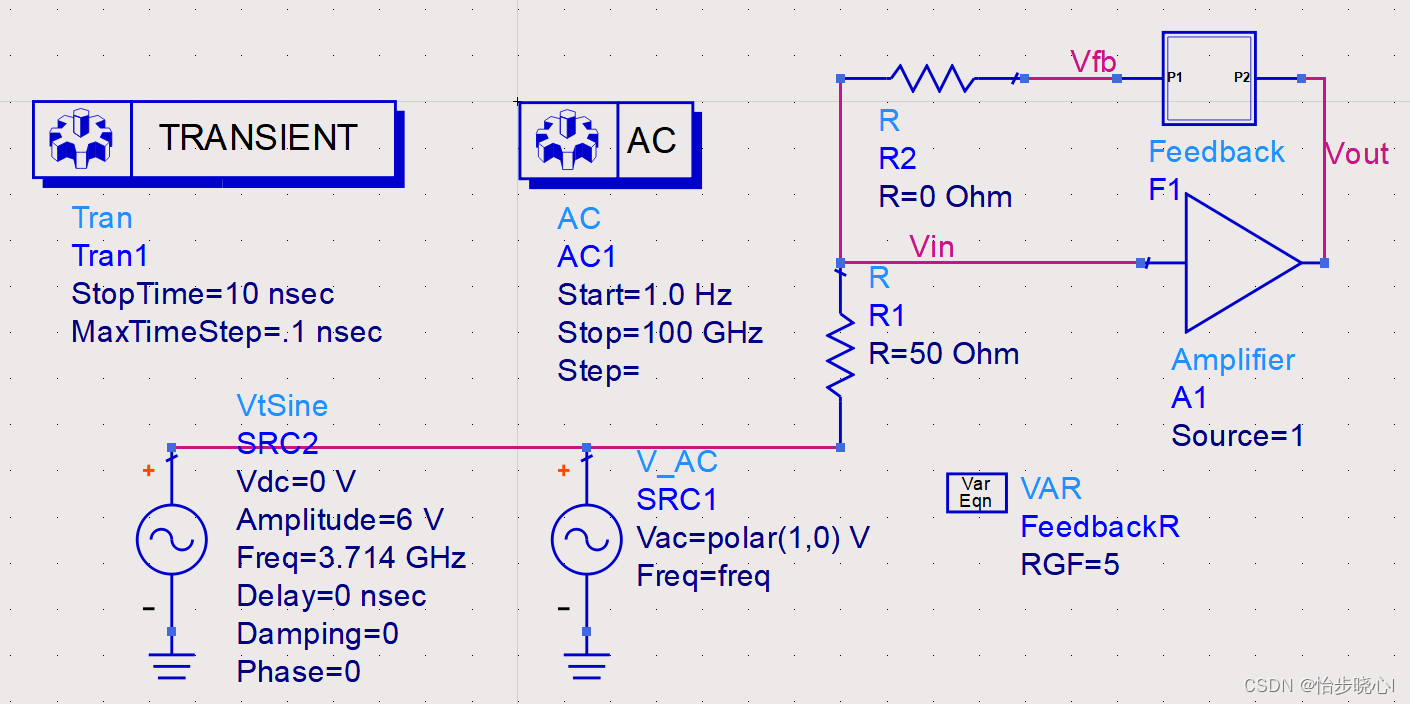
修改FeedBack电路:
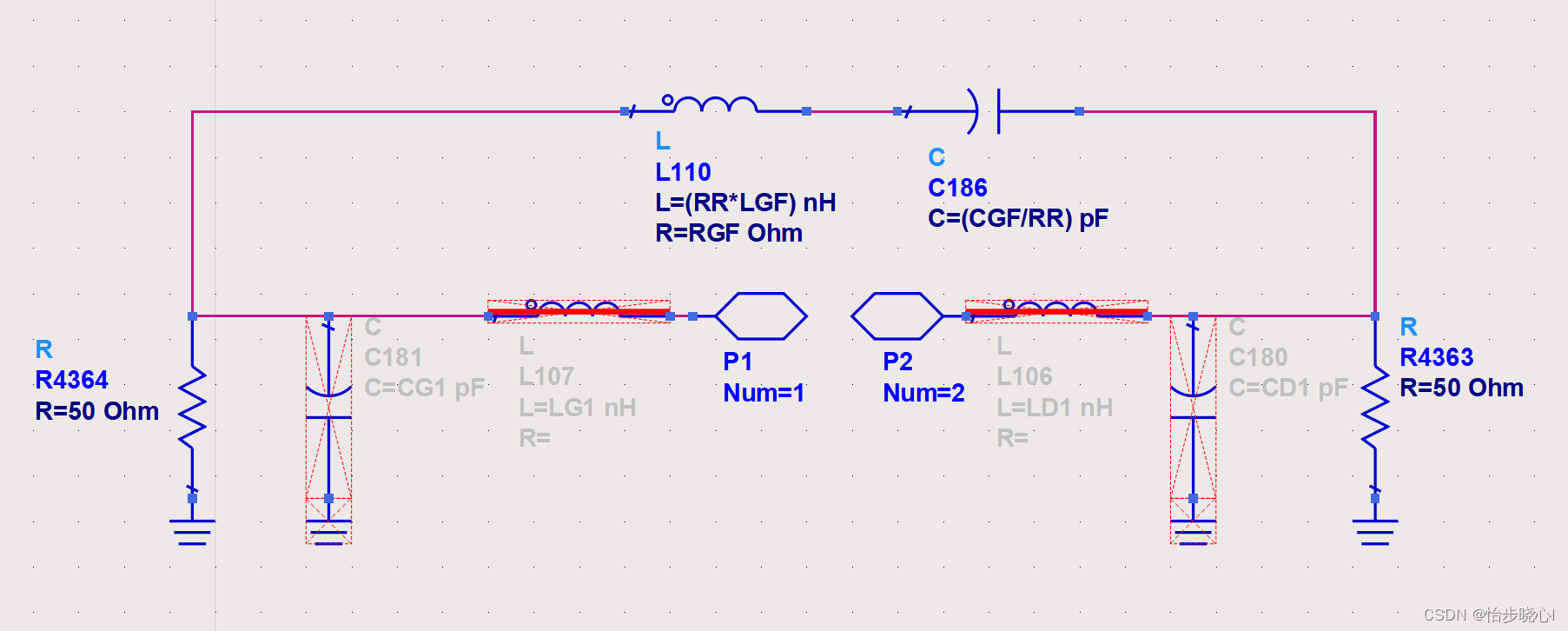
重新在开路情况下仿真,发现结果不绕(1,0)有圈数:
因此系统稳定:
Z
=
P
−
R
=
0
+
0
=
0
\mathrm{Z}=\mathrm{P}-\mathrm{R}=0+0=0
Z=P−R=0+0=0
为了对判断进行验证,加上反馈:
发现是非常稳定的:


















 2183
2183

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











