







注:本教程是在RealSense SDK和ROS Kinetic已正确安装的情况下进行的
一、realsense-ros安装
1.Create a catkin workspace
mkdir -p realsense_rosws/src #realsense_rows 自己命名的工程文件名,可改,本教程是在home路径下建立
cd realsense_rosws/src #回到src文件夹路径下
catkin_init_workspace #创建工作空间
2.clone realsense-ros文件下到src下
cd realsense_rosws #返回该文件目录
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
echo "source /home/zhoy/realsense_rosws/devel/setup.bash" >> ~/.bashrc #注意修改文件路径
source ~/.bashrc
3.ros使用realsense
sudo apt-get install ros-kinetic-rgbd-launch
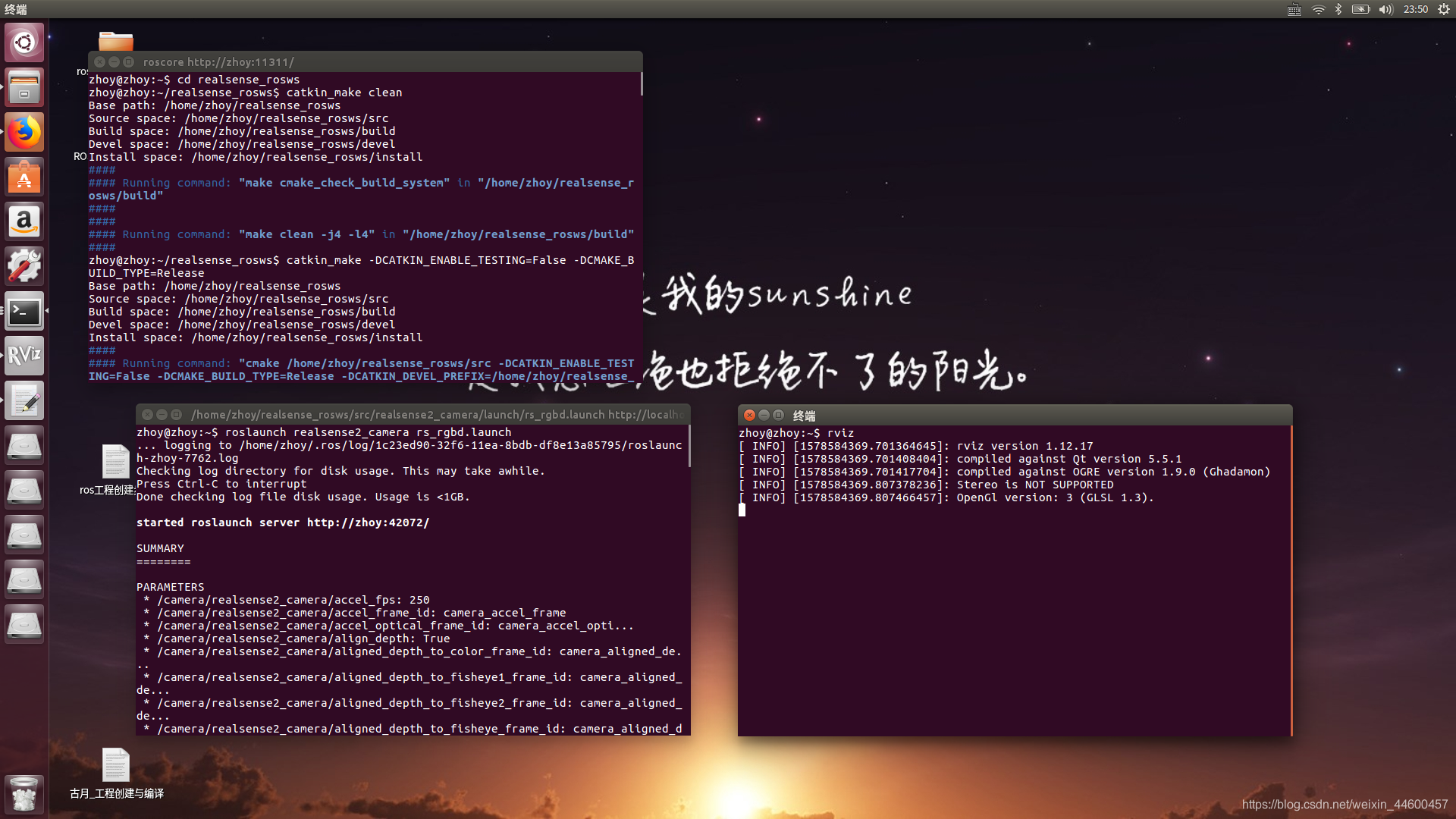
roscore #新开一个终端
roslaunch realsense2_camera rs_rgbd.launch #另新开一个终端
rivz #另新开一个终端
 二、realsense-ros配置
二、realsense-ros配置
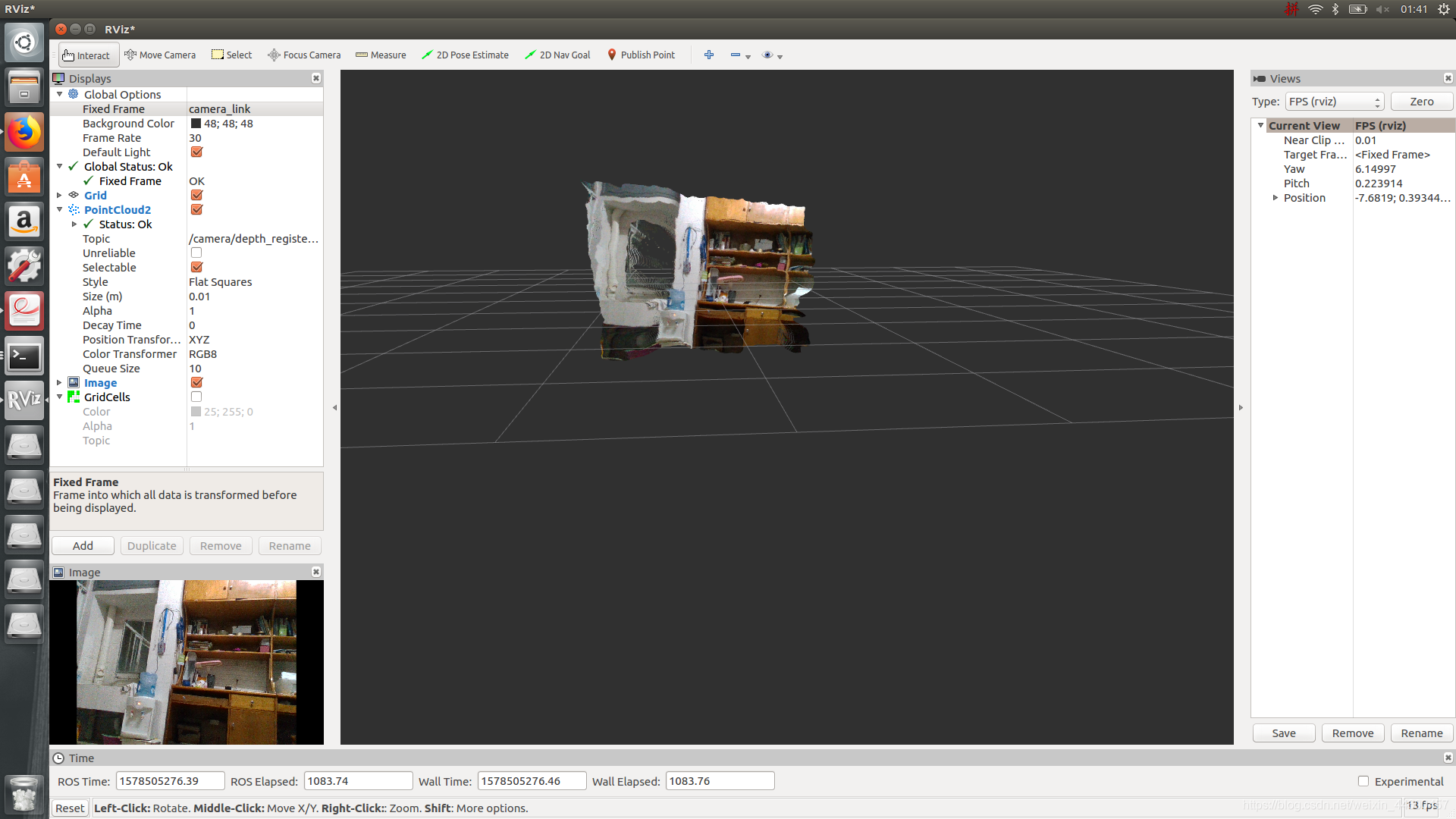
左上角 Displays 中 Fixed Frame 选项中,下拉菜单选择 camera_link
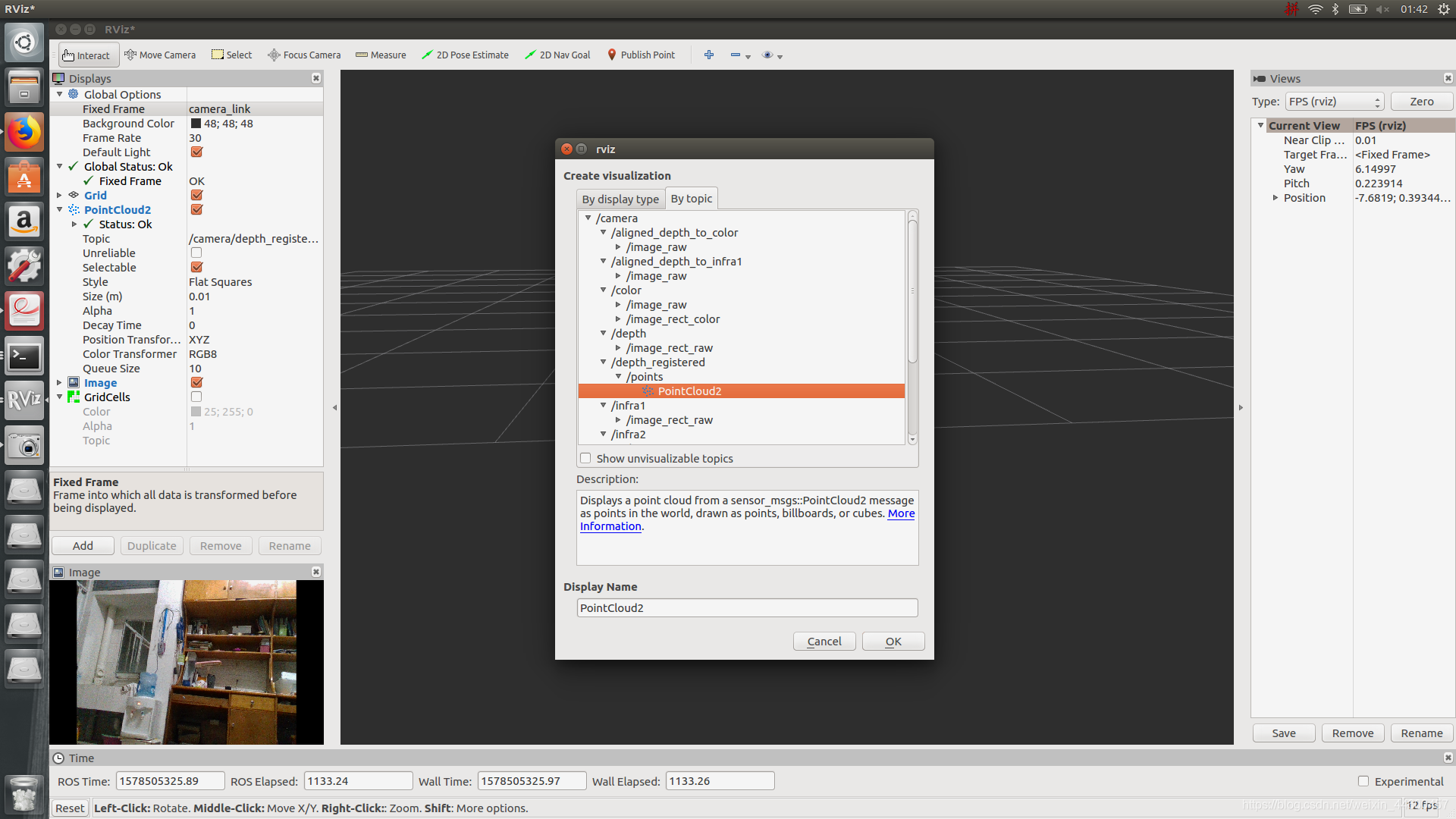
点击该框中的Add -> 上方点击 By topic -> /depth_registered 下的 /points 下的/PointCloud2
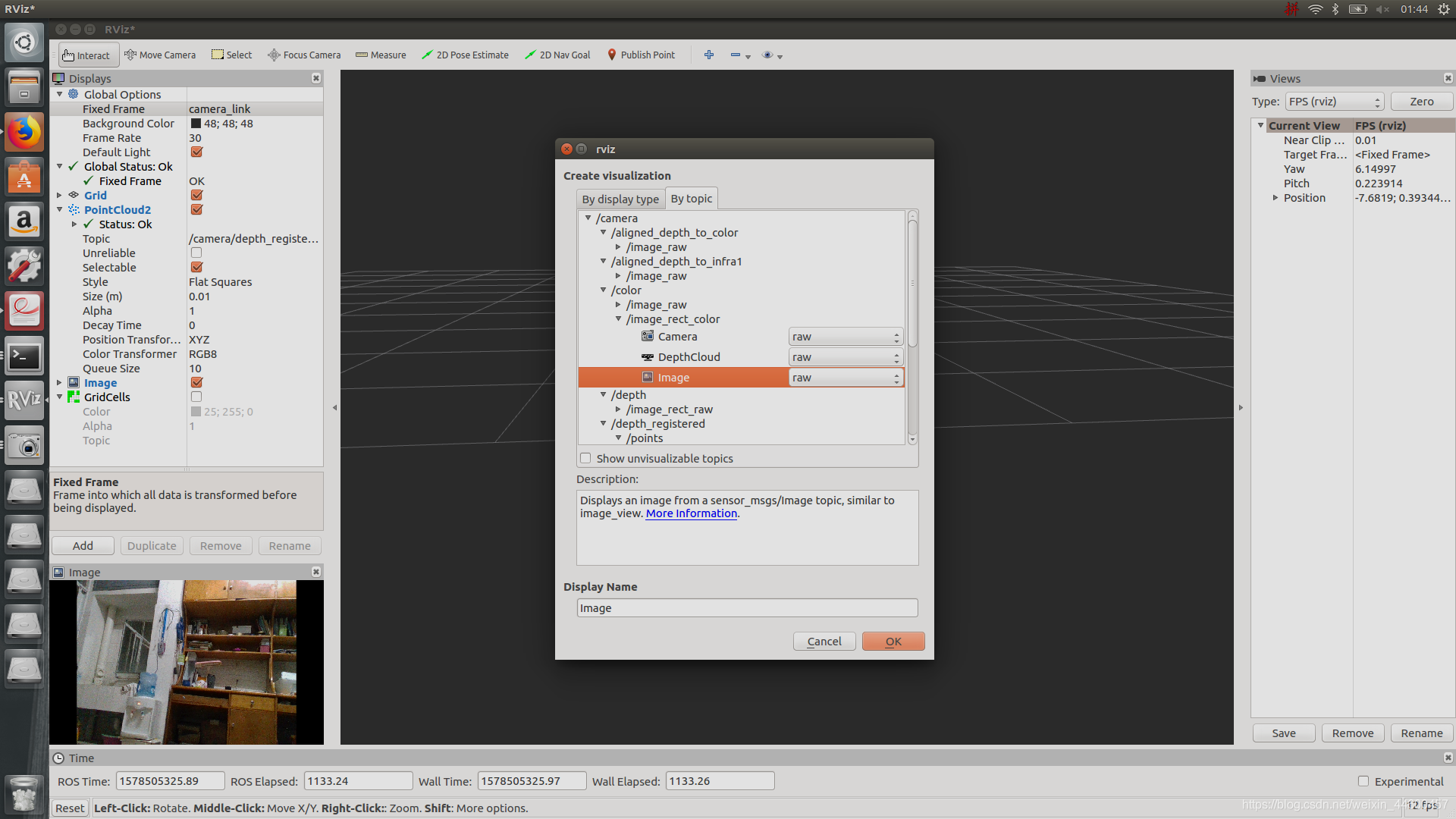
点击该框中的Add -> 上方点击 By topic -> /color 下的 /image_raw 下的image
 三、注意事项
三、注意事项
如果再次调用本调试好的工程,请记得再次调用时声明路径,即代码如下:
echo "source /home/zhoy/realsense_rosws/devel/setup.bash" >> ~/.bashrc #指定路径,注意zhoy是我的计算机名
#zhoy字符用你的计算机名代替并且注意路径
source ~/.bashrc
roscore
roslaunch realsense2_camera rs_rgbd.launch
rivz
四、常见错误及解决
待更新。。。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









