







毫米波信道学习记录
写在前
在初次接触毫米波信道的学习过程中,看到了知乎作者 “@张马也” 以及CSDN作者 “B417科研笔记” 的学习笔记,获益匪浅。为了便于个人学习,遂整理如下笔记,仅搬运和分享他们的学习成果,也会添加一些个人理解,仅做记录和分享,再次感谢你们作为科研工作者的分享与交流。
原链接:
https://www.cnblogs.com/MayeZhang/p/12374196.html
https://blog.csdn.net/weixin_39274659/article/details/104434934
MIMO信道回顾
MIMO无线信道的数学模型中, h i , j h_{i,j} hi,j 是发射端第 i i i 根天线和接收端第 j j j 根天线的复信道增益,该增益来源于多条射线的叠加,每条射线是经过多条不同的路径到达接收机的 h i , j = ∑ i a i e j θ t h_{i,j} = \sum_i a^i e^{j \theta_t} hi,j=i∑aiejθt 信道增益的模 ∣ h i , j ∣ |h_{i,j}| ∣hi,j∣ 服从瑞利分布,如果除了大量的散射体还有一个很强的直射LoS路径,则信道增益的模 |hi,j| 服从莱斯分布。
- 注意: h i , j h_{i,j} hi,j 是发射端第 i i i 根天线和接收端第 j j j 根天线之间的子信道,也是由一堆不同的路径叠加而成的,而不是仅指一条路径!
- 对于低频情况下,可以直接假设每一个子信道 h i , j h_{i,j} hi,j 服从瑞利 或 莱斯分布。
毫米波信道
毫米波信道中一般有2-4个多径,时延扩展很小,k因子很大,从而可以简化为单径信道模型。时延扩展很小说明传输距离较近(也可以解释径的数量较少)、K因子很大说明是LOS场景,LOS场景下通信以LOS径进行通信,LOS径占了90%甚至95%~98%的功率。虽然有其他一些径的存在,但是功率太小不可能进行通信。不过如果是论文中严谨一些,建议采用TR 38.901中的信道模型,目前全球通信公司预研基本都用的该模型,具有代表性。from this link
其他毫米波信道建议采用:3GPP TR 38.901
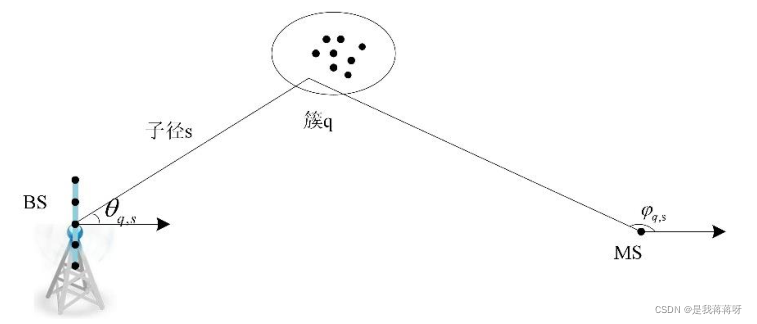
毫米波相关论文最常使用的毫米波信道模型都是基于Saleh-Valenzuela模型,包含一堆方位角、俯仰角之类。毫米波绕射能力差,路径稀疏,信道模型具有丰富的几何特征。
以下引用作者原话:
毫米波信道与低频信道不同,由于毫米波基本沿直线传播,绕射能力差,其信道的散射路径较少,往往远少于发射和接收天线的数量,因此其信道模型具有丰富的几何特征。而低频信道由于散射路径丰富,往往建模成随机信道比如瑞利分布,因此并不包含通信环境的信息。
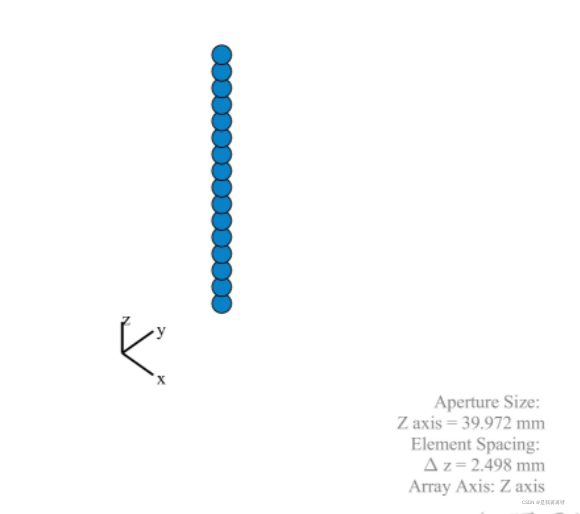
均匀线性阵列(Uniform Linear Array, ULA)
2D MIMO 通信系统发射天线是线性天线,它形成的波束较宽,只有水平维度的方向,没有垂直维度的方向。这样每条子径包含发射端的出发角 AoD(Angle of Departure),接收端的到达角 AoA(Angle of Arrival)以及 时延 三个特征变量。
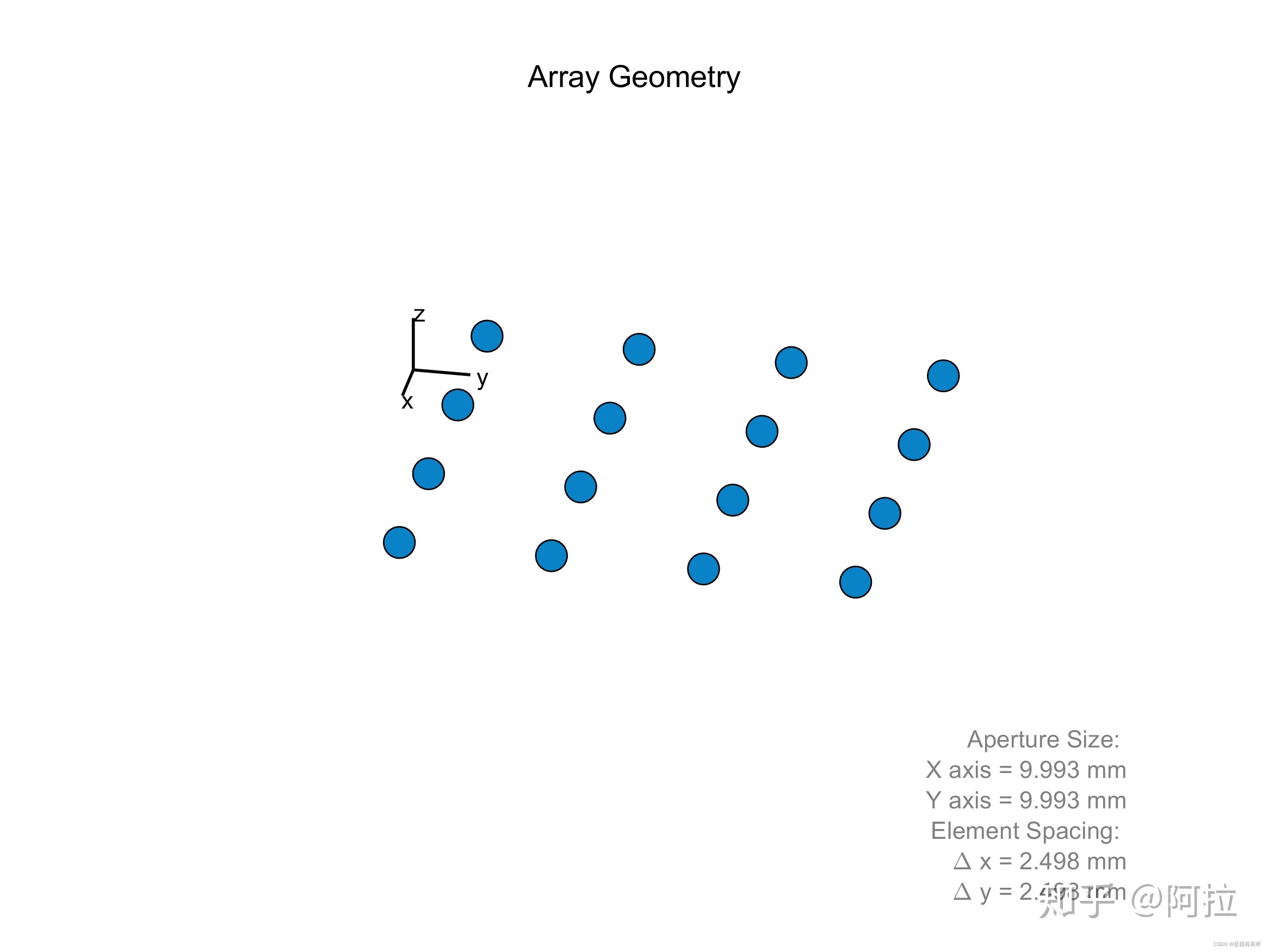
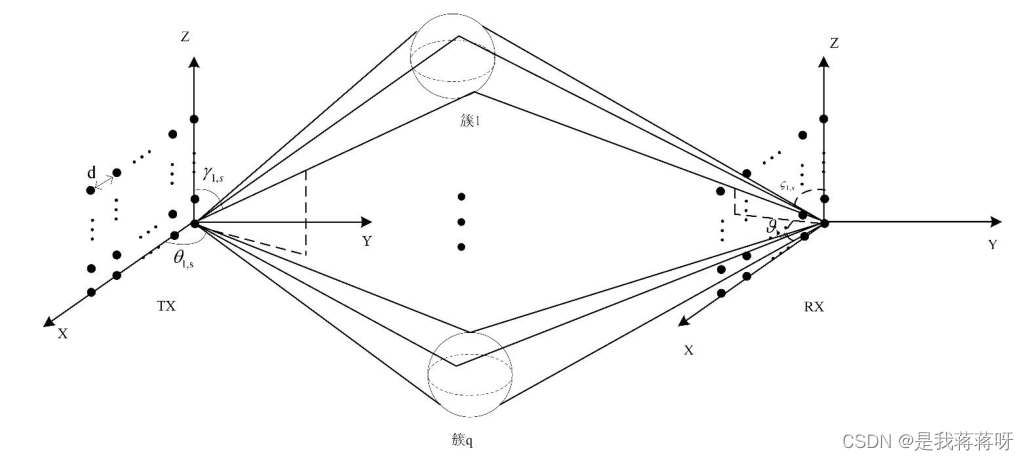
均匀平面阵列(Uniform Planar Array, UPA)
3D MIMO 通信系统一般在基站端配备大规模的均匀平面天线阵列 。3D MIMO 通信系统基站端配备的天线元件多,且相对于 2D MIMO 通信系统新增加了垂直方向的天线自由度,即系统可以同时在水平维和垂直维上灵活精确调整波束方向,这样发射端可以形成更窄、更精确的波束,具有很高的指向性。 此时描述子径的应该是 离开和到达的方位角 (azimuth angle),仰角 (elevation angle)。
毫米波信道模型
发射端和接收端均为 ULA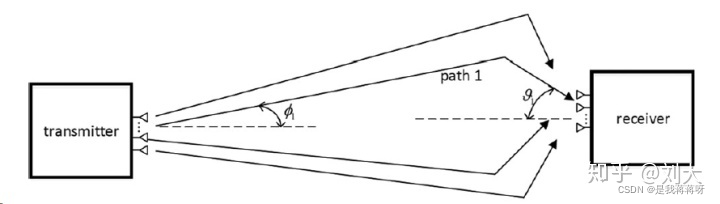
考虑简单模型,没有 cluster,假设只有
L
L
L 条散射路径。
经典的 Saleh-Valenzuela (S-V) 信道模型,假设发射天线有
N
t
N_t
Nt 根,接收天线有
N
r
N_r
Nr 根,则
L
L
L 条散射路径的归一化窄带毫米波信道可以表示为:
H
=
N
t
N
r
L
∑
ℓ
=
1
L
α
ℓ
a
r
(
v
ℓ
)
a
t
H
(
ϕ
ℓ
)
H = \sqrt{\frac{N_tN_r}{L}} \sum_{\ell =1}^L \alpha_{\ell} \mathbf{a}_{r}(v_{\ell}) \mathbf{a}_{t}^H(\phi_{\ell})
H=LNtNrℓ=1∑Lαℓar(vℓ)atH(ϕℓ)
- α ℓ \alpha_{\ell} αℓ 代表第 ℓ \ell ℓ 条路径的衰落系数,一般建模为高斯分布。
- v ℓ v_{\ell} vℓ 和 ϕ ℓ \phi_{\ell} ϕℓ 分别是第 ℓ \ell ℓ 条路径的到达角 AoA 和出发角 AoD,一般简化假设在 [ − π 2 , π 2 ] [- \frac{\pi}{2}, \frac{\pi}{2}] [−2π,2π] 内均匀分布, 可以根据参考文献决定范围。
-
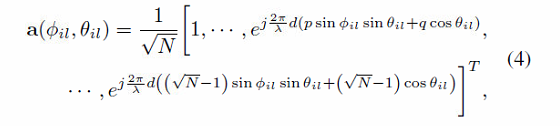
a
(
θ
)
\mathbf{a}(\theta)
a(θ) 是天线阵列的方向矢量(steering vector),又称为 array response,当天线为 N 维 ULA 时,归一化的方向矢量表达式为
a U L A ( θ ) = 1 N [ 1 , e j 2 π λ d sin ( θ ) , ⋯ , e j 2 π λ d ( N − 1 ) sin ( θ ) ] T \mathbf{a}_{ULA}(\theta) = \frac{1}{\sqrt{N}}[1, e^{j\frac{2\pi}{\lambda}d\sin(\theta)},\cdots, e^{j\frac{2\pi}{\lambda}d(N-1)\sin(\theta)}]^T aULA(θ)=N1[1,ejλ2πdsin(θ),⋯,ejλ2πd(N−1)sin(θ)]T a r ( v ℓ ) \mathbf{a}_{r}(v_{\ell}) ar(vℓ) 表示的是第 ℓ \ell ℓ 径接收端的方向矢量,是 N r × 1 N_r \times 1 Nr×1 维的向量; a t H ( ϕ ℓ ) \mathbf{a}_{t}^H(\phi_{\ell}) atH(ϕℓ) 表示第 ℓ \ell ℓ 径的发射端的方向矢量,是 N t × 1 N_t \times 1 Nt×1 维的向量; a r ( v ℓ ) a t H ( ϕ ℓ ) \mathbf{a}_{r}(v_{\ell}) \mathbf{a}_{t}^H(\phi_{\ell}) ar(vℓ)atH(ϕℓ) 是 N r × N t N_r \times N_t Nr×Nt 维的矩阵; 把这些所有 L L L 条路径相加,也就是我们的信道矩阵。
MIMO信道收发端都是 ULA天线阵列的时候,steering vector如上所示,但对于 MISO (SIMO) 模型,接收端(发射端)只有一个天线的话应该就不用考虑接收端(发射端)的方向矢量了。
发射端和接收端均为 UPA
假设有
N
c
l
N_{cl}
Ncl 个散射簇,每个散射簇中包含
N
r
a
y
N_{ray}
Nray 条传播路径。窄带毫米波信道表示为:
H
=
N
t
N
r
N
c
l
N
r
a
y
∑
i
=
1
N
c
l
∑
ℓ
=
1
N
r
a
y
α
i
ℓ
a
r
(
ϕ
i
ℓ
r
,
θ
i
ℓ
r
)
a
t
H
(
ϕ
i
ℓ
t
,
θ
i
ℓ
t
)
H = \sqrt{\frac{N_tN_r}{N_{cl}N_{ray}}} \sum_{i=1}^{N_{cl}} \sum_{\ell =1}^{N_{ray}} \alpha_{i\ell} \mathbf{a}_{r}(\phi^r_{i\ell}, \theta^r_{i\ell}) \mathbf{a}_{t}^H(\phi^t_{i\ell}, \theta^t_{i\ell})
H=NclNrayNtNri=1∑Nclℓ=1∑Nrayαiℓar(ϕiℓr,θiℓr)atH(ϕiℓt,θiℓt)
- α i ℓ \alpha_{i\ell} αiℓ 代表第 $i $个散射簇中第 ℓ \ell ℓ 条路径的衰落系数。
- ϕ i ℓ r , θ i ℓ r \phi^r_{i\ell}, \theta^r_{i\ell} ϕiℓr,θiℓr 代表接收端的方向角和俯仰角。 a r ( ϕ i ℓ r , θ i ℓ r ) \mathbf{a}_{r}(\phi^r_{i\ell}, \theta^r_{i\ell}) ar(ϕiℓr,θiℓr) 表示方向角和俯仰角在接收端的归一化天线阵列响应向量。
- a t H ( ϕ i ℓ t , θ i ℓ t ) \mathbf{a}_{t}^H(\phi^t_{i\ell}, \theta^t_{i\ell}) atH(ϕiℓt,θiℓt) 代表发射端的方向角和俯仰角, a t H ( ϕ i ℓ t , θ i ℓ t ) \mathbf{a}_{t}^H(\phi^t_{i\ell}, \theta^t_{i\ell}) atH(ϕiℓt,θiℓt) 表示方向角和俯仰角在发射端的归一化天线阵列响应向量。
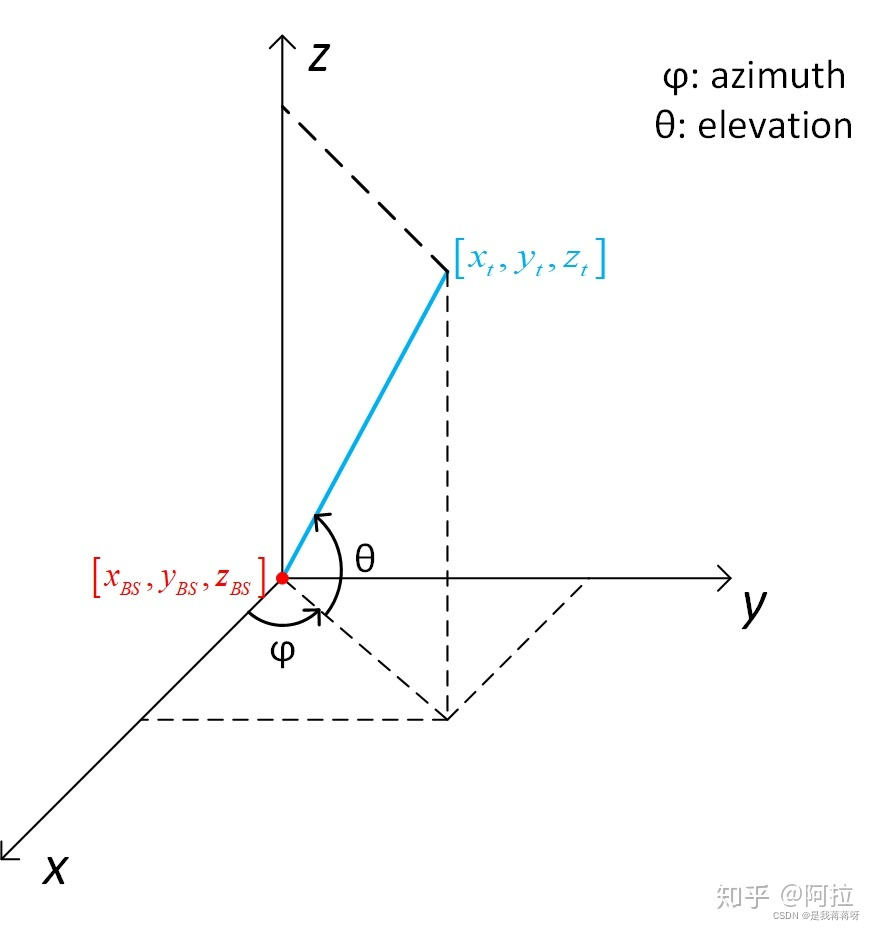
- 针对该图 UPA放置在 X-Z 平面上的情形,发射端 UPA天线阵列的归一化响应向量可以表示为:
a U L A ( ϕ , θ ) = 1 N [ 1 , ⋯ , e j 2 π λ d [ m sin ( ϕ ) sin ( θ ) + n cos ( θ ) ] , ⋯ , e j 2 π λ d [ ( N x − 1 ) sin ( ϕ ) sin ( θ ) + ( N z − 1 ) cos ( θ ) ] ] T \mathbf{a}_{ULA}(\phi, \theta) = \sqrt{\frac{1}{N}}[1 ,\cdots, e^{j\frac{2\pi}{\lambda}d[m\sin(\phi)\sin(\theta)+n\cos(\theta)]},\cdots, \\ e^{j\frac{2\pi}{\lambda}d[(N_x-1)\sin(\phi)\sin(\theta)+(N_z-1)\cos(\theta)]}]^T aULA(ϕ,θ)=N1[1,⋯,ejλ2πd[msin(ϕ)sin(θ)+ncos(θ)],⋯,ejλ2πd[(Nx−1)sin(ϕ)sin(θ)+(Nz−1)cos(θ)]]T
N N N 为均匀平面阵列的天线元素个数,x 轴和 z 轴上分别有 N x N_x Nx 和 N z N_z Nz 个天线元素, d d d 是天线间隔。该表达式还可以写为克罗内克积的形式,更简洁。
注意,该公式的 ϕ \phi ϕ 表示的即为图中表示的 TX 端的俯仰角。针对UPA来说,steering vector 和俯仰角的关系取决于UPA的在三维坐标中的放置,下面给出 UPA 放置在Y-Z平面 和 X-Y平面的两种情形。 - Y-Z平面放置IRS的情形
- X-Y平面放置IRS的情形
UAV 端的 UPA 天线阵列的归一化响应向量 [5] 可以表示为:
a U L A ( ϕ k , ℓ n , θ k , ℓ n ) = 1 M E N A [ 1 , ⋯ , e j 2 π λ [ m d x sin ( θ k , ℓ n ) cos ( ϕ k , ℓ n ) + n d y sin ( θ k , ℓ n ) sin ( ϕ k , ℓ n ) ] , ⋯ , e j 2 π λ [ ( N A − 1 ) d x sin ( θ k , ℓ n ) cos ( ϕ k , ℓ n ) + ( M E − 1 ) d y sin ( θ k , ℓ n ) sin ( ϕ k , ℓ n ) ] ] T \mathbf{a}_{ULA}(\phi_{k,\ell}^n, \theta_{k,\ell}^n) = \sqrt{\frac{1}{M_EN_A}}[1 ,\cdots, e^{j\frac{2\pi}{\lambda}[m d_x \sin(\theta_{k,\ell}^n)\cos(\phi_{k,\ell}^n)+n d_y \sin(\theta_{k,\ell}^n)\sin(\phi_{k,\ell}^n)]},\cdots, \\ e^{j\frac{2\pi}{\lambda}[(N_A-1)d_x\sin(\theta_{k,\ell}^n)\cos(\phi_{k,\ell}^n)+(M_E-1)d_y\sin(\theta_{k,\ell}^n)\sin(\phi_{k,\ell}^n)]} ]^T aULA(ϕk,ℓn,θk,ℓn)=MENA1[1,⋯,ejλ2π[mdxsin(θk,ℓn)cos(ϕk,ℓn)+ndysin(θk,ℓn)sin(ϕk,ℓn)],⋯,ejλ2π[(NA−1)dxsin(θk,ℓn)cos(ϕk,ℓn)+(ME−1)dysin(θk,ℓn)sin(ϕk,ℓn)]]T
d x d_x dx 和 d y d_y dy 分别表示X和Y轴上的天线之间的间距,一般取 d = λ 2 d = \frac{\lambda}{2} d=2λ 。
ϕ k , ℓ n \phi_{k,\ell}^n ϕk,ℓn 和 θ k , ℓ n \theta_{k,\ell}^n θk,ℓn 分别表示方向角和方位角, 定义如图 Fig.2 所示。我们定义第 n n n 个 UAV 的位置为 ( x n , y x , z n ) (x_n,y_x,z_n) (xn,yx,zn),面向第 k k k 个 UE 的第 ℓ \ell ℓ 条径的散射体的位置为 ( x k ℓ , y k ℓ , 0 ) (x_k^{\ell},y_k^{\ell},0) (xkℓ,ykℓ,0),那么 ϕ k , ℓ n \phi_{k,\ell}^n ϕk,ℓn 和 θ k , ℓ n \theta_{k,\ell}^n θk,ℓn 表达式如下:
θ k , ℓ n = arctan ( ( x k ℓ − x n ) 2 + y k ℓ − y n ) 2 z n ) ϕ k , ℓ n = arctan ( y k ℓ − y n x k ℓ − x n ) − π min ( s i g n ( x k ℓ − x n ) , 0 ) \theta_{k,\ell}^n = \arctan \left(\frac{\sqrt{(x_k^{\ell}-x_n)^2+y_k^{\ell}-y_n)^2}}{z_n}\right) \\ \phi_{k,\ell}^n = \arctan \left(\frac{y_k^{\ell}-y_n}{x_k^{\ell}-x_n}\right) -\pi\min(\mathrm{sign} (x_k^{\ell}-x_n),0) θk,ℓn=arctan⎝⎛zn(xkℓ−xn)2+ykℓ−yn)2⎠⎞ϕk,ℓn=arctan(xkℓ−xnykℓ−yn)−πmin(sign(xkℓ−xn),0)
其中, s i g n \mathrm{sign} sign为符号函数: x > 0 x>0 x>0, s i g n ( x ) = 1 \mathrm{sign}(x)=1 sign(x)=1; x = 0 x=0 x=0, s i g n ( x ) = 0 \mathrm{sign}(x)=0 sign(x)=0; x < 0 x<0 x<0, s i g n ( x ) = − 1 \mathrm{sign}(x)=-1 sign(x)=−1。

- 注意,这里的
N
r
a
y
N_{ray}
Nray 条传播路径包含 1条 LoS 路径,以及
(
N
r
a
y
−
1
)
(N_{ray}-1)
(Nray−1) 条 NLoS 路径。在 UAV-UE 之间不存在遮挡的情形,只有一条 LoS 径,没有簇和散射径,将
N
r
=
1
,
N
c
l
=
1
,
N
r
a
y
=
1
N_r=1, N_{cl}=1, N_{ray}=1
Nr=1,Ncl=1,Nray=1 带入
H
H
H 得到:
h k n = N t α k n a t ( θ k n , ϕ k n ) h_k^n = \sqrt{N_t} \alpha_k^n \mathbf{a}_{t}(\theta^n_k, \phi^n_k) hkn=Ntαknat(θkn,ϕkn)
α k n \alpha_k^n αkn 为第 n n n 个 UAV 和第 k k k 个 UE 之间的LoS径的信道增益系数。非遮挡情况(即 LoS 径)的概率是关于仰角 ξ k n = arctan ( z n D k ) \xi_k^n = \arctan(\frac{z_n}{D_k}) ξkn=arctan(Dkzn) 的一个函数, D k D_k Dk 为第 n n n 个 UAV 和第 k k k 个 UE 之间的距离;该概率会随着仰角的增大而增大,当 z n z_n zn 足够大时,LoS 径的概率趋于1。该概率表达式为:
P N o − b l o c k a g e = 1 1 + a e ( − b ( ξ k n − a ) ) P_{No-blockage}=\frac{1}{1+ae^{(-b(\xi_k^n-a))}} PNo−blockage=1+ae(−b(ξkn−a))1
ξ k n = arctan ( z n D k ) \xi_k^n = \arctan(\frac{z_n}{D_k}) ξkn=arctan(Dkzn)是仰角; a , b a, b a,b 是取决于信道环境(e.g., rural, urban, or dense urban)的正的模型参数。遮挡概率为 P B l o c k a g e = 1 − P N o − b l o c k a g e P_{Blockage}=1-P_{No-blockage} PBlockage=1−PNo−blockage.
存在 IRS 的情况
- 当在发射端和接收端存在 IRS 时,就看假设 IRS 搭载的是 ULA 还是 UPA,然后带入相应的 steering vector 计算窄带毫米波信道增益即可。
S-V 毫米波信道仿真
仿真参数
在论文仿真中一般假设 α i ℓ \alpha_{i\ell} αiℓ 信道增益系数服从0均值的复高斯随机分布,对于存在blockage和不存在blockage的场景,方差的设定不同,可以参考文献仿真部分的参数设定,比如:
-
α
i
ℓ
∼
C
N
(
0
,
1
0
−
0.1
P
L
)
\alpha_{i\ell}\sim \mathcal{CN}(0,10^{-0.1\mathrm {P_L}})
αiℓ∼CN(0,10−0.1PL), where the distance-dependent path loss is modeled as
P
L
(
d
ℓ
)
=
α
+
10
β
log
10
(
d
ℓ
)
+
ξ
ℓ
\mathrm {P_L(d_{\ell})}=\alpha+10\beta\log_{10}(d_{\ell})+ \xi_{\ell}
PL(dℓ)=α+10βlog10(dℓ)+ξℓ
d ℓ d_{\ell} dℓ为第 ℓ \ell ℓ条径的收发端距离, α , β \alpha, \beta α,β 为常数, ξ ℓ ∼ N ( 0 , σ 2 ) \xi_{\ell} \sim \mathcal{N}(0,\sigma^2) ξℓ∼N(0,σ2)。
对 H ℓ H_{\ell} Hℓ 的 LoS 径 (non-blockage), α = 61.4 , β = 2 , σ = 5.8 \alpha=61.4, \beta=2, \sigma=5.8 α=61.4,β=2,σ=5.8 dB;
对 H ℓ H_{\ell} Hℓ 的 NLoS 径 (blockage), α = 72.0 , β = 2.92 , σ = 8.7 \alpha=72.0, \beta=2.92, \sigma=8.7 α=72.0,β=2.92,σ=8.7 dB [5, 6] 。 - 毫米波载波频率设为 28 GHz [5-ref 36/37],带宽 251.1886 MHz [4]。
- 信道环境参数 (计算 LoS 概率) a = 11.95 , b = 0.14 a = 11.95, b = 0.14 a=11.95,b=0.14。 [5-ref36]
- 天线间距 d = λ 2 d=\frac{\lambda}{2} d=2λ。
- 噪声功率 σ 2 = − 91 \sigma^2=-91 σ2=−91 dBm [6] 或 σ 2 = − 174 + 10 log 10 B = − 90 \sigma^2=-174+10\log_{10}B=-90 σ2=−174+10log10B=−90 dBm [4]。
仿真实例
System Model
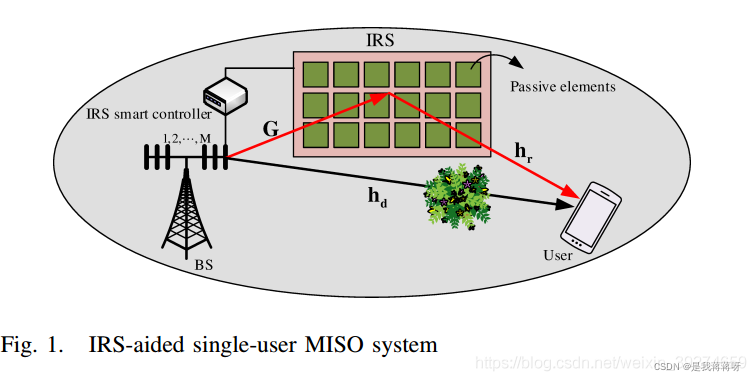
- IRS系统可以分为三个信道:
- 基站直接到达用户的信道: BS-UE 信道
- 基站到智能反射面的信道: BS-IRS 信道
- 智能反射面到用户的信道:IRS-UE 信道
- steering vector
Matlab Codes
- 实现单侧UPA的天线响应向量的仿真函数
function y = array_response(phi,theta, N)
for m= 0:sqrt(N)-1 % IRS is square array (N elements)
for n= 0:sqrt(N)-1
y(m*(sqrt(N))+n+1) = exp( 1i* pi* ( m*sin(phi)*sin(theta) + n*cos(theta) ) ); % i represents complex
end
end
y = y.'/sqrt(N); % normalized
end
- BS-IRS 信道生成函数 (IRS - UE的信道生成同理)
function H = generate_channel(Nt, Nr, L)
AoD = pi*rand(L, 2) - pi/2; % -2/pi~2/pi (generating the angles of departure for L paths)
AOA = pi*rand(L, 2) - pi/2; % -2/pi~2/pi (generating the angles of arrival for L paths)
alpha(1) = 1; % gain of the LoS
alpha(2:L) = 10^(-0.5)*(randn(1,L-1)+1i*randn(1,L-1))/sqrt(2); % gains of the NLoS
H = zeros(Nr, Nt);
for l=1:1:L
ar = array_response(AOA(L,1),AOA(L,2), Nr);
at = array_response(AOD(L,1),AOD(L,2), Nt);
H = H + sqrt(Nr * Nt)*alpha(l)*ar*at';
end
- Note: 需要指出实际中方位角和仰角的变化范围应该不同,仰角的变化范围会偏小, 因此更合理的仿真应该进一步限制其生成范围。 但就像上面所说,如果只是为了随机生成智能反射面信道用于仿真,不用纠结的那么细。
- alpha 代表的是信道的衰落系数, 为了区别LOS径和NLOS径,我们默认第一径是LOS径,给了归一化的能量为1。 而NLOS径的能量则是高斯变量, 并且为了体现出与LOS径的能量差, 给了一个衰减系数。
- 关于该场景 BS-UE 的信道, 有几种不同的建模:
- 直接假设BS-UE间被阻隔, 即不存在LoS径,但是有NLOS径,那么就可以用上面的代码去仿真,只需要把 LOS 径去掉即可。
- 假设为瑞利衰落信道(许多论文采用这个建模),瑞利的仿真代码非常容易, 网上查找,不再赘述。
来自作者的 Remark
- 在仿真中衰落系数设定时,只要衰落取值有据可循,能体现距离导致的衰落即可。
- 路径较少,稀疏信道用SV,路径太多又不想逐一建模,简单起见用瑞丽建模。
- 建模信道的时候已经体现了, 毫米波的稀疏性等。 至于具体频率这些与LTE的不同,在仿真中其实没有体现。 因为考虑是等效基带的场景,不论是什么射频都等效到基带完成。(待考究)
- 部分资料里:当天线为全向天线时,方位角范围−ππ,俯仰角−0.5π0.5π,当天线是定向天线时,会有定向天线增益。这里只是随机举个例子。比如有时候基站会选择30-150度是水平角范围,30-60是仰角范围。不同场景不一样。你写程序的时候把这个作为变量,甚至可以多跑几种参数。文献的话可以去搜IRS相关的paper,然后看他们选取的信道参数。据我所知都是大同小异,因为这个不是文章的重点。
- 在这个模型里面的路径总数L设一个3-20的随机整数即可。
- α 代表的是信道的衰落系数, 为了区别LOS径和NLOS径,我们默认第一径是LOS径,给了归一化的能量为1。 而NLOS径的能量则是高斯变量, 并且为了体现出与LOS径的能量差, 给了一个衰减系数。那么当 IRS 和 UE 之间的距离改变时,是衰落系数α改变还是衰减系数发生改变呢?
alpha在改变。一般认为衰减系数决定于NLOS所经过的反射体的衰减,这个应该不会随距离变化。如果认为是开阔空间的话,直接按衰落与距离平方成反比,来模拟就行。 - 实际中衰落因子就是由距离计算而来,但是我们仿真时考虑普遍情况,即不知道用户的具体位置。那么,将衰落因子设置为高斯变量,进行几千次蒙特卡洛仿真,可以视作仿真了用户在各种不同距离 位置的情况。现在一般的仿真都可以这样设置。当然,你也可以设置一个具体的用户位置,计算衰落因子,但这样有失一般性,因为你应当希望估计的算法能适用于所有的信道(对应不同的用户位置)
- 为什么没有考虑多路径的时延,而是直接将各路径的信道相加呢?
相比于信号周期,各径延时可以忽略不计,等效看作时同时到达,这就是窄带模型。宽带模型因为信号周期短,因此要考虑时延,但UPA的响应及智能反射面的响应等公式依旧是通用的。考虑的是窄带情形,宽带情形的话是需要考虑时延的,一般按ofdm进行仿真。
Userful code links
https://blog.csdn.net/weixin_39274659/article/details/104434934
code reproduction of an paper
total IRS related code transfer
IRS 综述
参考文献
[1] Ayach O E , Rajagopal S , Abu-Surra S , et al. Spatially Sparse Precoding in Millimeter Wave MIMO Systems[J]. IEEE Transactions on Wireless Communications, 2013, 13(3):1499-1513.
[2] Akdeniz M R , Liu Y , Samimi M K , et al. Millimeter Wave Channel Modeling and Cellular Capacity Evaluation[J]. IEEE Journal on Selected Areas in Communications, 2014, 32(6):1164-1179.
[3] Yu X , Shen J C , Zhang J , et al. Alternating Minimization Algorithms for Hybrid Precoding in Millimeter Wave MIMO Systems[J]. IEEE Journal of Selected Topics in Signal Processing, 2016, 10(3):485-500.
[4] Wang P , Fang J , Dai L , et al. Joint Transceiver and Large Intelligent Surface Design for Massive MIMO MmWave Systems[J]. IEEE Transactions on Wireless Communications, 2020, PP(99):1-1.
[5] Jiang L , H Jafarkhani. Reconfigurable Intelligent Surface-Assisted mmWave multi-UAV Wireless Cellular Networks[J]. 2021.
[6] Hong S H , Park J , Kim S J , et al. Hybrid Beamforming for Intelligent Reflecting Surface Aided Millimeter Wave MIMO Systems[J]. 2021.

















 830
830

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









