







摘要
- 目前使用高分辨率遥感图像的CD方法需要大量的计算资源,并且容易受到图像中存在无关噪声的影响。
- 为此,提出了comparison-based attention Siamese network (CAS-Net)。
- 该网络利用contrastive attention modules (CAMs)进行特征融合,并使用分类器来确定双时态图像patch的异同。它通过比较图像patch,简化了像素级的cd。因此,降低了图像背景噪声对变化预测的影响。
- 并且,利用高分辨率遥感图像建立了一个unmanned aerial vehicle (UAV) similarity detection (UAV-SD)数据集。该数据集包括10 000对无人机图像,大小为256×256。
- 在UAV-SD数据集上的实验表明,CAS-Net)优于其他CD网络。在UAV-SD数据集上的CAS-Net检测准确率为93.1%。
- 论文链接:CAS-Net: Comparison-Based Attention Siamese Network for Change Detection With an Open High-Resolution UAV Image Dataset | IEEE Journals & Magazine | IEEE Xplore
- 代码链接:https://github.com/tulingLab/CAS-Net
引言
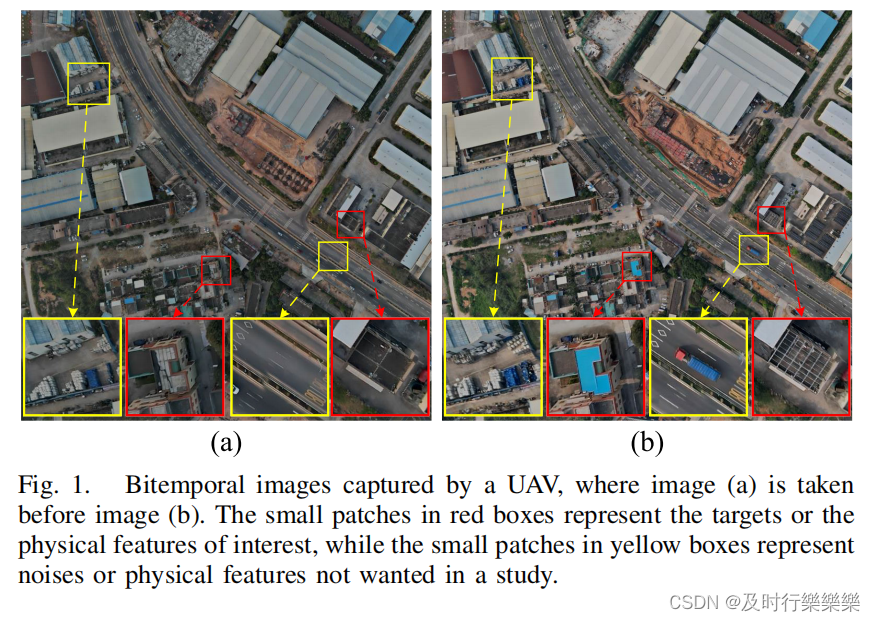
下图表示由无人机捕获的双时态图像,其中图像(a)和图像(b)红框中的patch代表感兴趣的目标或物理特征,而黄色框中的patch代表研究中不需要的噪声或物理特征。
下图比较了像素级CD方法与基于比较的CD方法。两种方法都有一个编码器E,特征融合模块F,以及解码器D或分类器C。编码器(由权重共享的孪生网络组成ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1352
1352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









