






一、introduction
1、The development of 3D point cloud descriptor is going through two major stages:
(1)hand-crafted period:mainly built on the basis of spatial and geometric attributes or relationships between points(空间、几何属性或点与点对应关系)
(2)deep learning-based period:Using deep neural networks to learn latent features from
the 3D point cloud.
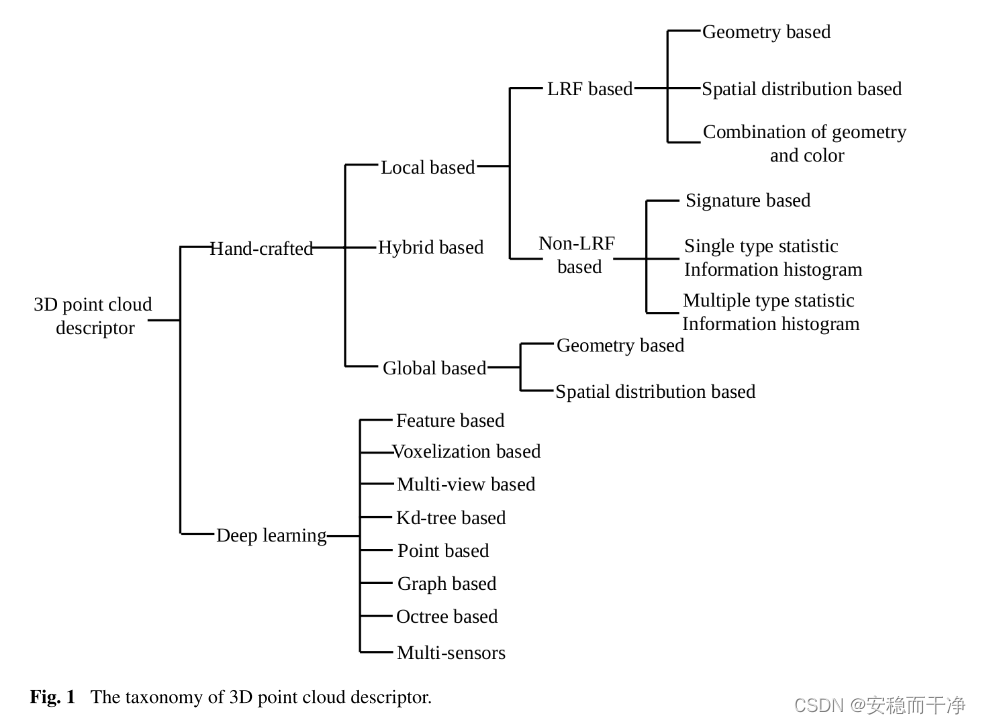
二、Taxonomy(分类,如标题分为两类)
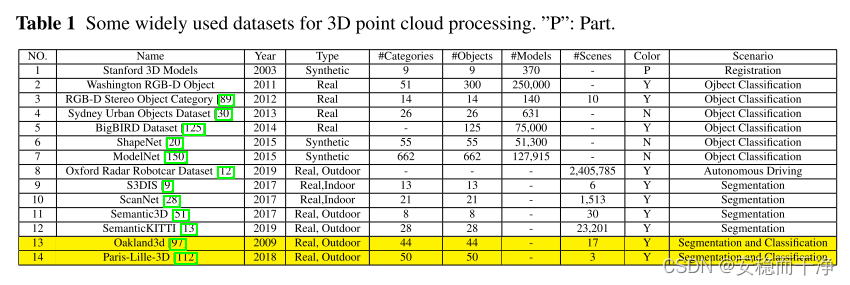
三、dataset(数据集)
hybrid:混合
LRF:laser range finder 激光测距仪
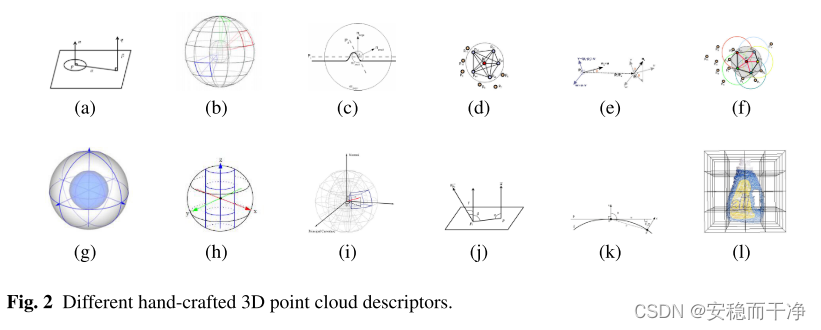
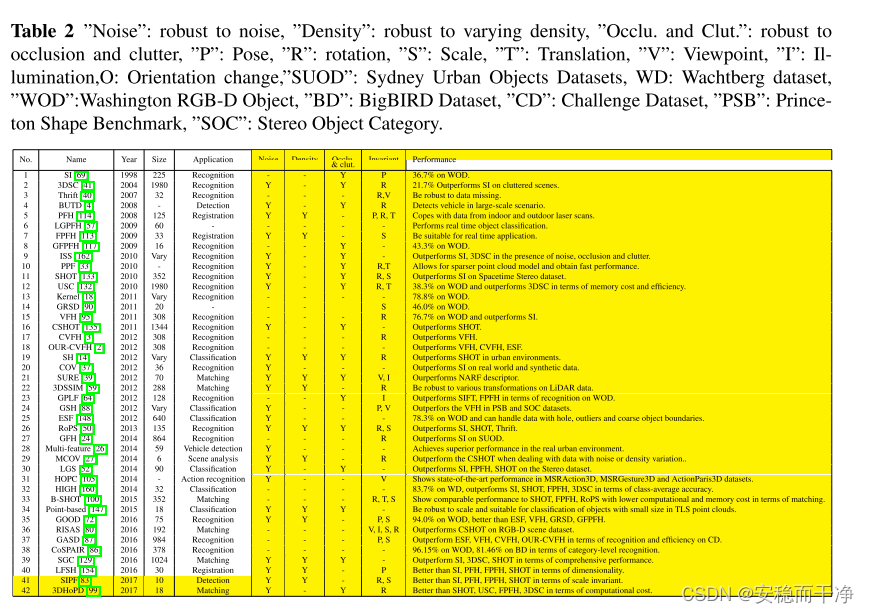
四、3D point cloud Descriptors in hand-crafted age and discussion
three primary categories:global-based descriptors, local-based descriptors, and hybrid-based descriptors.(基于全局的描述符、基于局部的描述符和基于混合的描述符)
Summary of Hand-crafted Descriptor:
•The global based methods generally estimate a single descriptor vector encoding the whole input 3D point cloud for scenarios, such as 3D object recognition, geometric categorization, and shape retrieval. Therefore, the success of the global descriptor relies on the observation of the entire geometry of the point cloud of the object, which turns out to be a little more complicated.
• The local descriptor construct features resorting to the geometrical information of the local neighborhood of each keypoint obtained from the point cloud using relevant keypoint-extraction algorithms. So the local descriptors are robust to occlusion and clutter [50] (suitable for applications, e.g. registration, 3D object recognition, and categorization), which the global counterpart is not. However, the local descriptor is commonly sensitive to the changes in the neighborhoods around keypoints [52]. While the hybrid-based descriptor is the sort of descriptor fusing the essential theorem of local and global descriptors or incorporating both kinds of descriptors together to make use of the advantages of local and global features.















 378
378











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









