







硬件测试平台:正点原子潘多拉STM32L4开发板
OS内核版本:4.0.0
注意:下面的示例代码是从原子提供的例程中摘录,因此可能与最新的RT-Thread源码有出入(因为RT-Thread源码在不断的开发维护中)
下面摘录的例程中,关键位置我给出了注释
本文涉及内容对初学者可能较为晦涩难懂,如只是想先简单学习Pin设备驱动的API使用可以参考:RT-Thread Pin设备驱动API应用介绍
首先看main.c,可见main函数主要实现了LED闪烁,以及打印LED状态的功能
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
/* using RED LED in RGB */
#define LED_PIN PIN_LED_R
int main(void)
{
unsigned int count = 1;
/* set LED pin mode to output */
rt_pin_mode(LED_PIN, PIN_MODE_OUTPUT);
while (count > 0)
{
/* led on */
rt_pin_write(LED_PIN, PIN_LOW);
rt_kprintf("led on, count: %d\n", count);
rt_thread_mdelay(500);
/* led off */
rt_pin_write(LED_PIN, PIN_HIGH);
rt_kprintf("led off\n");
rt_thread_mdelay(500);
count++;
}
return 0;
}
PIN_LED_R在硬件驱动层的drv_gpio.h中定义了
#define PIN_LED_R 38 // PE7 : LED_R --> LED
剖析顺序从上到下,从应用层深入到驱动层。(pin驱动相关的源文件主要包括drv_gpio.c 、pin.c、 device.c)
代码框架如下图:
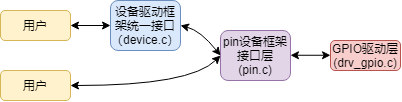
接口层的pin.c往上对接用户,往下对接底层驱动。

对于不同芯片,用户层的接口是统一的,而对于驱动层来说,只需要对接好相应的回调函数。
通过统一的接口,应用开发不需要知道底层驱动,减少重复造轮子的时间。
按照点灯裸机的编程思路,先是开启GPIO时钟,然后初始化控制LED的GPIO为输出,最后写GPIO输出高或低电平。
main函数中先是rt_pin_mode函数,从字面上看也知道这是设置pin工作模式。下面追踪代码:
/* RT-Thread Hardware PIN APIs */
void rt_pin_mode(rt_base_t pin, rt_base_t mode)
{
RT_ASSERT(_hw_pin.ops != RT_NULL); //断言 检查_hw_pin.ops不为空
_hw_pin.ops->pin_mode(&_hw_pin.parent, pin, mode); //调用底层回调函数
}
结构体_hw_pin 定义在pin.c中
static struct rt_device_pin _hw_pin;
进一步追踪struct rt_device_pin 这个结构体类型
/* pin device and operations for RT-Thread */
struct rt_device_pin
{
struct rt_device parent;
const struct rt_pin_ops *ops;
};
//在rtdef.h
/**
* Device structure
*/
struct rt_device
{
struct rt_object parent; /**< inherit from rt_object */
enum rt_device_class_type type; /**< device type */
rt_uint16_t flag; /**< device flag */
rt_uint16_t open_flag; /**< device open flag */
rt_uint8_t ref_count; /**< reference count */
rt_uint8_t device_id; /**< 0 - 255 */
/* device call back */
rt_err_t (*rx_indicate)(rt_device_t dev, rt_size_t size);
rt_err_t (*tx_complete)(rt_device_t dev, void *buffer);
#ifdef RT_USING_DEVICE_OPS
const struct rt_device_ops *ops;
#else
/* common device interface */
rt_err_t (*init) (rt_device_t dev);
rt_err_t (*open) (rt_device_t dev, rt_uint16_t oflag);
rt_err_t (*close) (rt_device_t dev);
rt_size_t (*read) (rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size);
rt_size_t (*write) (rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size);
rt_err_t (*control)(rt_device_t dev, int cmd, void *args);
#endif
#if defined(RT_USING_POSIX)
const struct dfs_file_ops *fops;
struct rt_wqueue wait_queue;
#endif
void *user_data; /**< device private data */
};
//在pin.h
struct rt_pin_ops
{
void (*pin_mode)(struct rt_device *device, rt_base_t pin, rt_base_t mode);
void (*pin_write)(struct rt_device *device, rt_base_t pin, rt_base_t value);
int (*pin_read)(struct rt_device *device, rt_base_t pin);
/* TODO: add GPIO interrupt */
rt_err_t (*pin_attach_irq)(struct rt_device *device, rt_int32_t pin,
rt_uint32_t mode, void (*hdr)(void *args), void *args);
rt_err_t (*pin_detach_irq)(struct rt_device *device, rt_int32_t pin);
rt_err_t (*pin_irq_enable)(struct rt_device *device, rt_base_t pin, rt_uint32_t enabled);
};
struct rt_device_pin 这个类型中的成员ops,是接口层与硬件驱动层的媒介。
从struct rt_pin_ops类型可以看到里面是六个函数指针分别对应设置pin模式,写pin,读pin,以及三个与中断有关的。
那问题是,在哪里把ops变量初始化了,也就是把pin接口层和底层连接起来呢?
答案是在初始化阶段里面实现了,关于RT-Thread的初始化流程可查看:RT-Thread启动流程
初始化流程中的调用关系如下:
$ Sub $ $main(void) =》 rtthread_startup() =》 rt_hw_board_init() =》 rt_hw_pin_init()
(对 $ Sub $ $不明白的可以参考:关于 $ Super $ $ 和 $ Sub $ $ 的用法)
前面的函数就不放出来了,直接从rt_hw_pin_init() 开始看:
//这是drv_gpio.c的
const static struct rt_pin_ops _stm32_pin_ops =
{
stm32_pin_mode,
stm32_pin_write,
stm32_pin_read,
stm32_pin_attach_irq,
stm32_pin_dettach_irq,
stm32_pin_irq_enable,
};
int rt_hw_pin_init(void)
{
return rt_device_pin_register("pin", &_stm32_pin_ops, RT_NULL);
}
//这是pin.c的
int rt_device_pin_register(const char *name, const struct rt_pin_ops *ops, void *user_data)
{
_hw_pin.parent.type = RT_Device_Class_Miscellaneous;
_hw_pin.parent.rx_indicate = RT_NULL;
_hw_pin.parent.tx_complete = RT_NULL;
#ifdef RT_USING_DEVICE_OPS
_hw_pin.parent.ops = &pin_ops;
#else
_hw_pin.parent.init = RT_NULL;
_hw_pin.parent.open = RT_NULL;
_hw_pin.parent.close = RT_NULL;
_hw_pin.parent.read = _pin_read;
_hw_pin.parent.write = _pin_write;
_hw_pin.parent.control = _pin_control;
#endif
_hw_pin.ops = ops; //这里把_stm32_pin_ops和 _hw_pin.ops 连接起来了
_hw_pin.parent.user_data = user_data;
/* register a character device */
rt_device_register(&_hw_pin.parent, name, RT_DEVICE_FLAG_RDWR);
return 0;
}
从上面的代码可以看出,底层驱动只要实现_stm32_pin_ops 里的6个接口函数即可。
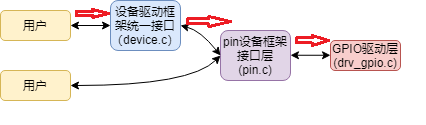
至此我们已初步理清了RT-Thread Pin设备驱动的框架关系了:

如上图,我们在应用层需要学会rt_pin_mode等6个API接口的使用,在底层需要实现GPIO驱动的回调函数。
从上图可以直观地看到 Pin 设备驱动框架和 GPIO 驱动是如果对接到一起的。
如上图所示:
- 左侧为 Pin 设备驱动框架封装的 API 接口,向上提供给应用层使用;
- 右侧为具体芯片平台对接 Pin 设备的驱动程序,与 Pin 设备框架提供的 API 接口一一对应,通过 rt_pin_ops 结构体关联到一起,驱动框架层接口最终会回调驱动层接口;
- 最后通过 rt_device_pin_register 函数接口,将底层驱动与 Pin 设备框架绑定到一起,注册到 RT-Thread 的设备框架中。
在对接 RT-Thread Pin 设备框架的时候,仅需要实现上图右侧 rt_pin_ops 结构体中的所有 callback 回调函数即可,然后通过 rt_device_pin_register 注册到系统,最后使用 rt_hw_pin_init 调用以进行初始化。
rt_hw_pin_init 在系统启动过程中被 rt_hw_board_init 调用。
点灯主要关注stm32_pin_mode和stm32_pin_write这两个函数即可实现:(两个函数都在驱动层也就是drv_gpio.c中实现)
static void stm32_pin_mode(rt_device_t dev, rt_base_t pin, rt_base_t mode)
{
const struct pin_index *index;
GPIO_InitTypeDef GPIO_InitStruct;
index = get_pin(pin);
if (index == RT_NULL)
{
return;
}
/* GPIO Periph clock enable */
index->rcc();
/* Configure GPIO_InitStructure */
GPIO_InitStruct.Pin = index->pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
if (mode == PIN_MODE_OUTPUT)
{
/* output setting */
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
}
else if (mode == PIN_MODE_INPUT)
{
/* input setting: not pull. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
}
else if (mode == PIN_MODE_INPUT_PULLUP)
{
/* input setting: pull up. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
}
else if (mode == PIN_MODE_INPUT_PULLDOWN)
{
/* input setting: pull down. */
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
}
else if (mode == PIN_MODE_OUTPUT_OD)
{
/* output setting: od. */
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
}
HAL_GPIO_Init(index->gpio, &GPIO_InitStruct);
}
static void stm32_pin_write(rt_device_t dev, rt_base_t pin, rt_base_t value)
{
const struct pin_index *index;
index = get_pin(pin);
if (index == RT_NULL)
{
return;
}
HAL_GPIO_WritePin(index->gpio, index->pin, (GPIO_PinState)value);//调用HAL库函数控制GPIO输出高低电平
}
关于stm32_pin_mode函数有一个问题,我们知道GPIO_InitStruct需要初始化四个成员变量分别是选择pin,选择GPIO模式,选择是否加上下拉,选择GPIO速度,上述代码从对上层的通用性考虑(不是每个芯片都可以控制速率等),只往上提供了mode,而速度固定在了GPIO_SPEED_FREQ_HIGH,上拉下拉则根据mode固定变化。如果有特殊需求对某个GPIO要做一些特殊配置,比如要降低某个GPIO的速率以降低功耗,这就得另外去改了。
下面关于stm32_pin_write()函数单独拉出来对相关代码分析一下:
#define LED_PIN PIN_LED_R
#define PIN_LED_R 38 // PE7 : LED_R --> LED
#define PIN_LOW 0x00
#define PIN_HIGH 0x01
rt_pin_write(LED_PIN, PIN_LOW);
void rt_pin_write(rt_base_t pin, rt_base_t value)
{
RT_ASSERT(_hw_pin.ops != RT_NULL);
_hw_pin.ops->pin_write(&_hw_pin.parent, pin, value); //以上分析我们知道,pin_write实际上就是指向了stm32_pin_write函数
}
static void stm32_pin_write(rt_device_t dev, rt_base_t pin, rt_base_t value)
{
const struct pin_index *index;
index = get_pin(pin);
if (index == RT_NULL)
{
return;
}
HAL_GPIO_WritePin(index->gpio, index->pin, (GPIO_PinState)value);//调用HAL库函数控制GPIO输出高低电平
}
static void stm32_pin_write(rt_device_t dev, rt_base_t pin, rt_base_t value)
{
const struct pin_index *index;
index = get_pin(pin);
if (index == RT_NULL)
{
return;
}
HAL_GPIO_WritePin(index->gpio, index->pin, (GPIO_PinState)value);//(GPIO_PinState)这里用了强制转换是防止上层传下来0或1会编译报警
}
#define ITEM_NUM(items) sizeof(items) / sizeof(items[0])
static const struct pin_index *get_pin(uint8_t pin)
{
const struct pin_index *index;
if (pin < ITEM_NUM(pins))
{
index = &pins[pin];
if (index->index == -1)
index = RT_NULL;
}
else
{
index = RT_NULL;
}
return index;
};
static const struct pin_index pins[] =
{
__STM32_PIN_DEFAULT,
__STM32_PIN(1, E, 2), // PE2 : SAI1_MCLK_A --> ES8388
__STM32_PIN(2, E, 3), // PE3 : SAI1_SD_B --> ES8388
...//省略
__STM32_PIN(38, E, 7), // PE7 : LED_R --> LED //这是我们要用到的红色LED脚
...//省略
__STM32_PIN(98, E, 1), // PE1 : IO_PE1 --> EXTERNAL MODULE
__STM32_PIN_DEFAULT, // : VSS
__STM32_PIN_DEFAULT, // : VDD
};
/* STM32 GPIO driver */
struct pin_index
{
int index;
void (*rcc)(void);
GPIO_TypeDef *gpio;
uint32_t pin;
};
//这里用到了##连接符 这个符号在RT-Thread里用得很多
#define __STM32_PIN(index, gpio, gpio_index) \
{ \
index, GPIO##gpio##_CLK_ENABLE, GPIO##gpio, GPIO_PIN_##gpio_index \
}
调用rt_pin_write时第一个参数传入38实际上就在struct pin_index pins[] 这里面索引到__STM32_PIN(38, E, 7),
查看原理图发现,这个表对应了芯片的引脚序号,比如38脚就是PE7,也就是我们要用的红色LED控制脚

rt_pin_write(38, 1)实际到了底层就是HAL_GPIO_WritePin(GPIOE, GPIO_PIN_7, (GPIO_PinState)1);
//(GPIO_PinState)这里用了强制转换是防止上层传下来0或1会编译报警 (细节到位)
最后还剩一个问题,在哪里使能了该GPIO时钟?
在stm32_pin_mode函数里面使能了对应的GPIO时钟,
/* GPIO Periph clock enable */
index->rcc();
rcc是一个函数指针,实际上是执行了 GPIOE_CLK_ENABLE();
看到struct pin_index类型第二个成员void (*rcc)(void);
pins是struct pin_index类型的结构体数组
我们用到的红色LED对应的__STM32_PIN(38, E, 7)
第二个宏参数E通过GPIO##gpio##_CLK_ENABLE ==》就变成了GPIOE_CLK_ENABLE
对##和#的用法不熟悉可参考: 详解C语言中 ##和# 的用法
通过设备驱动框架访问pin设备
- RTT设备驱动框架提供了统一的API:
| API | 说明 |
|---|---|
| rt_err_t rt_device_init (rt_device_t dev) | 设备初始化 |
| rt_err_t rt_device_open (rt_device_t dev, rt_uint16_t oflag) | 打开设备 |
| rt_err_t rt_device_close(rt_device_t dev) | 关闭设备 |
| rt_size_t rt_device_read (rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size) | 读设备 |
| rt_size_t rt_device_write(rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size) | 写设备 |
| rt_err_t rt_device_control(rt_device_t dev, int cmd, void *arg) | 控制设备 |
RTT提供的设备驱动API使用了类似Linux的设计思路,对设备的访问都通过如下接口open,read,write,close等来完成操作。
其中,pin设备的接口关系如下:

目前我的这套代码中_pin_control()只实现了GPIO的模式设置,如果要使用这组API需要自己增加相关代码实现对中断的控制:
static rt_err_t _pin_control(rt_device_t dev, int cmd, void *args)
{
struct rt_device_pin_mode *mode;
struct rt_device_pin *pin = (struct rt_device_pin *)dev;
/* check parameters */
RT_ASSERT(pin != RT_NULL);
mode = (struct rt_device_pin_mode *) args;
if (mode == RT_NULL) return -RT_ERROR;
pin->ops->pin_mode(dev, (rt_base_t)mode->pin, (rt_base_t)mode->mode);
return 0;
}
下面的示例代码从调用设备驱动框架的接口来实现对LED的控制:
int main(void)
{
int count = 1;
struct rt_device_pin *pin_dev = RT_NULL;
struct rt_device_pin_mode rt_device_pin_mode_led = {LED_PIN, PIN_MODE_OUTPUT};
struct rt_device_pin_status rt_device_pin_status_led = {LED_PIN, PIN_HIGH};
pin_dev = (struct rt_device_pin *)rt_device_find("pin");
rt_device_open((rt_device_t)pin_dev, RT_DEVICE_OFLAG_RDWR);
rt_device_control(&pin_dev->parent, 0, &rt_device_pin_mode_led);
while (count++)
{
rt_device_pin_status_led.status = PIN_HIGH;
rt_device_write((rt_device_t)pin_dev, 0, &rt_device_pin_status_led, sizeof(rt_device_pin_status_led));
rt_thread_mdelay(1000);
rt_device_pin_status_led.status = PIN_LOW;
rt_device_write((rt_device_t)pin_dev, 0, &rt_device_pin_status_led, sizeof(rt_device_pin_status_led));
rt_thread_mdelay(1000);
}
return RT_EOK;
}
最后
唠一句:
RT-Thread的代码还是不错的,初学者可能会对这种分层思想有点懵,但是实际项目中,这种思想一定要运用起来,只有真正的去解耦合,把应用层和驱动层尽可能分开,才能把应用层的代码做到方便在不同平台移植,这可能试着把这种工程代码移植一下平台,再对比一下不分层,应用和驱动相互交错的工程移植一下,就明白到底这种编程思想强在哪里了。重复地造轮子只会让人越来越累,降低工作效率。
















 1792
1792











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











