







FreeRTOS 系统的任务切换最终都是在 PendSV 中断服务函数中完成的,uCOS 也是在 PendSV 中断中完成任务切换的。
为什么用PendSV异常来做任务切换
PendSV 可以像普通中断一样被 Pending(往 NVIC 的 PendSV 的 Pend 寄存器写 1),常用的场合是 OS 进行上下文切换;它可以手动拉起后,等到比他优先级更高的中断完成后,再执行;
假设,带 OS 系统的 CM3 中有两个就绪的任务,上下文切换可以发生在 SYSTICK 中断中:
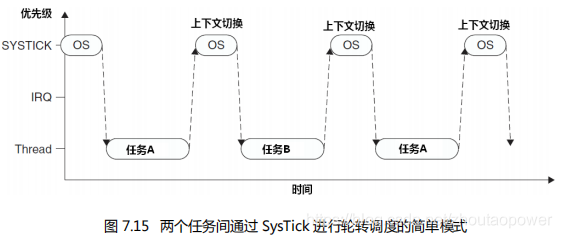
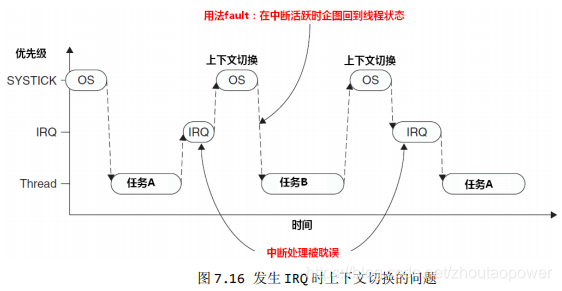
这里展现的是两个任务 A 和 B 轮转调度的过程;但是,如果在产生 SYSTICK 异常时,系统正在响应一个中断,则 SYSTICK 异常会抢占其他 ISR。在这种情况下 OS 是不能执行上下文切换的,否则将使得中断请求被延迟;
而且,如果在 SYSTICK 中做任务切换,那么就会尝试切入线程模式,将导致用法 fault 异常;因为正常来说,即使SYSTICK优先级比IRQ高,当SYSTICK执行完后,也应该是回到低优先级的中断处理函数IRQ里而不是直接切换到任务去运行了,这时候IRQ都没运行完呢,怎么能中断函数都没处理完就去运行主程序呢?自然是不允许这样的。
为了解决这种问题,早期的 OS 在上下文切换的时候,检查是否有中断需要响应,没有的话,采取切换上下文,然而这种方法的问题在于,可能会将任务切换的动作拖延很久(如果此次的 SYSTICK 无法切换上下文,那么要等到下一次 SYSTICK 再来切换),严重的情况下,如果某 IRQ 来的频率和 SYSTICK 来的频率比较接近的时候,会导致上下文切换迟迟得不到进行;
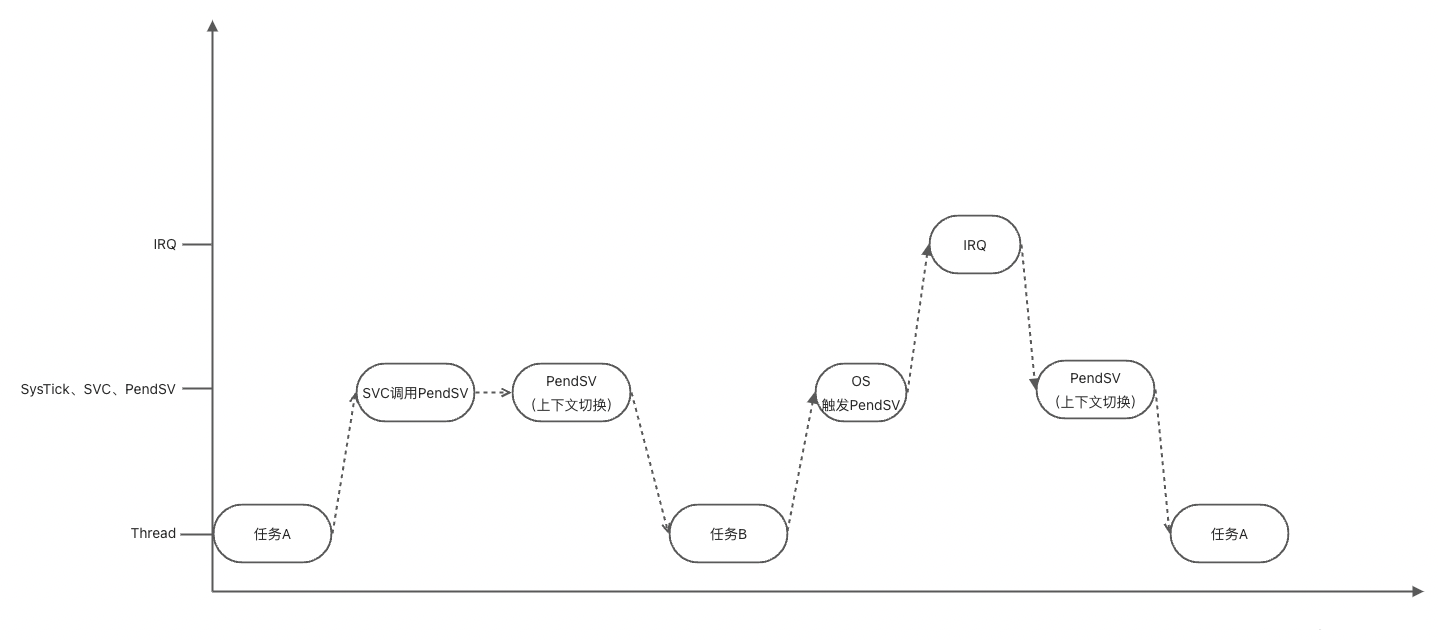
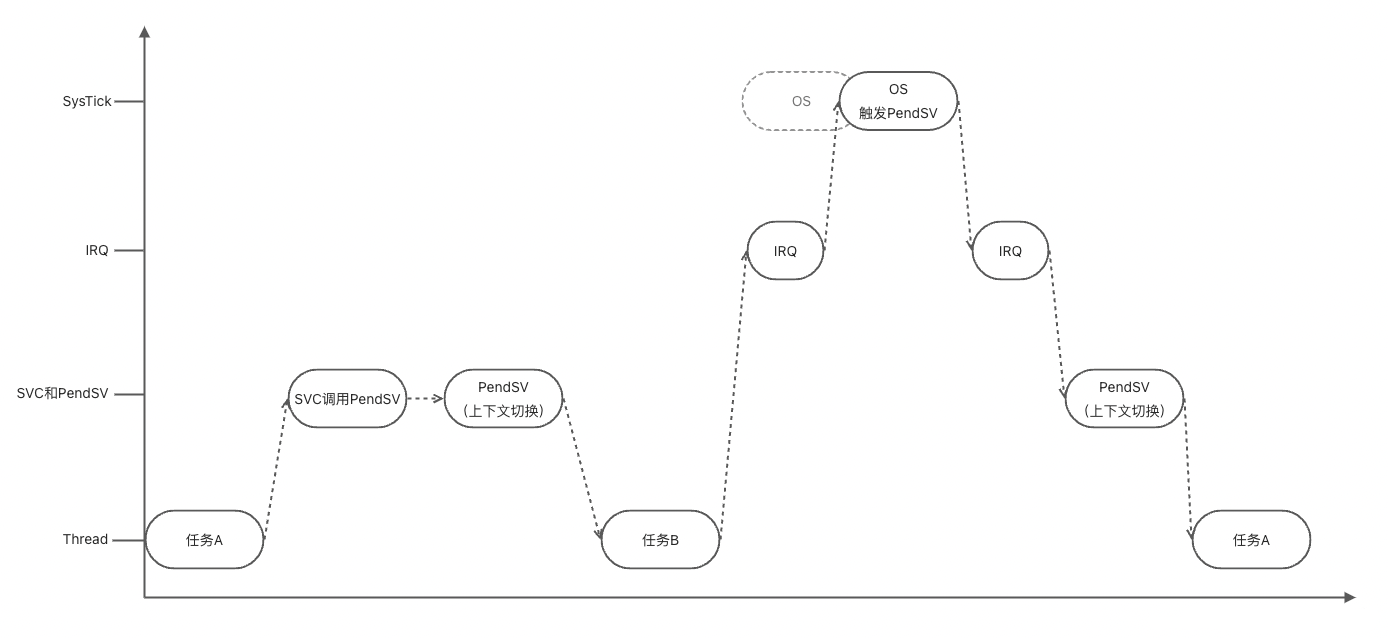
引入 PendSV 以后,可以将 PendSV 的异常优先级设置为最低,在 PendSV 中去切换上下文,PendSV 会在其他 ISR 得到相应后,立马执行:
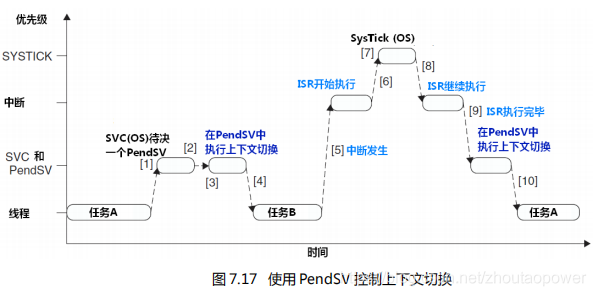
上图的过程可以描述为:
1、任务 A 呼叫 SVC 请求任务切换;
2、OS 收到请求,准备切换上下文,手动 Pending 一个 PendSV;
3、CPU 退出 SVC 的 ISR 后,发现没有其他 IRQ 请求,便立即进入 PendSV 执行上下文切换;
4、正确的切换到任务 B;
5、此刻发生了一个中断,开始执行此中断的 ISR;
6、ISR 执行一半,SYSTICK 来了,抢占了该 IRQ;
7、OS 执行一些逻辑,并手动 Pending PendSV 准备上下文切换;
8、退出 SYSTICK 的 ISR 后,由于之前的 IRQ 优先级高于 PendSV,所以之前的 ISR 继续执行;
9、ISR 执行完毕退出,此刻没有优先级更高的 IRQ,那么执行 PendSV 进行上下文切换;
10、PendSV 执行完毕,顺利切到任务 A,同时进入线程模式;
以上部分摘自:https://www.cnblogs.com/god-of-death/p/14856578.html
如何设定PendSV优先级
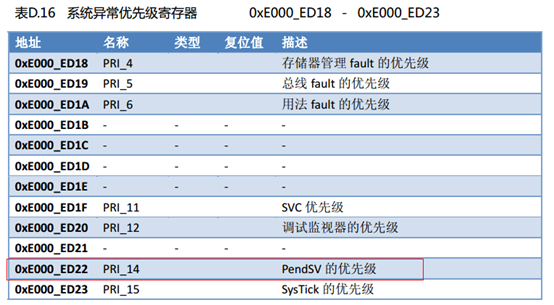
往地址为0xE000ED22的寄存器PRI_14写入PendSV优先级
NVIC_SYSPRI14 EQU 0xE000ED22
NVIC_PENDSV_PRI EQU 0xFF
LDR R1, =NVIC_PENDSV_PRI
LDR R0, =NVIC_SYSPRI14
STRB R1, [R0] ;将r1 中的 [7:0]存储到 r0 对应的内存
BX LR ;返回
如何触发PendSV异常

往ICSR第28位写1,即可将PendSV异常挂起。若是当前没有高优先级中断产生,那么程序将会进入PendSV handler
NVIC_INT_CTRL EQU 0xE000ED04
NVIC_PENDSVSET EQU 0x10000000
LDR R0, =NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
BX LR
测试PendSV异常handler实现任务切换
如何实现任务切换?三个步骤:
步骤一:在进入中断前先设置PSP。
步骤二:将当前寄存器的内容保存到当前任务堆栈中。进入ISR时,cortex-m3会自动保存八个寄存器到PSP中,剩下的几个需要我们手动保存。
步骤三:在Handler中将下一个任务的堆栈中的内容加载到寄存器中,并将PSP指向下一个任务的堆栈。这样就完成了任务切换。
要在PendSV 的ISR中完成这两个步骤,我们先需了解下在进入PendSV ISR时,cortex-M3做了什么?
1,入栈。会有8个寄存器自动入栈。入栈内容及顺序如下:
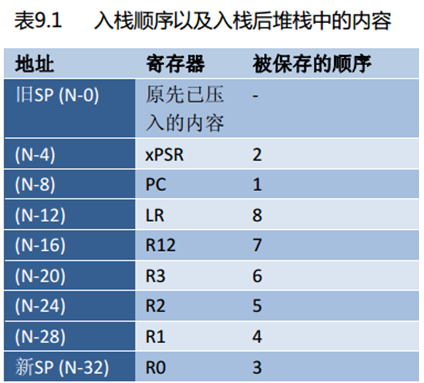
在步骤一中,我们已经设置了PSP,那这8个寄存器就会自动入栈到PSP所指地址处。
2,取向量。找到PendSV ISR的入口地址,这样就能跳到ISR了。
3,更新寄存器内容。
做完这三步后,程序就进入ISR了。
进入ISR前,我们已经完成了步骤一,cortex-M3已经帮我们完成了步骤二的一部分,剩下的需要我们手动完成。
在ISR中添加代码如下:
MRS R0, PSP
保存PSP到R0。为什么是PSP而不是MSP。因为在OS启动的时候,我们已经把SP设置为PSP了。这样使得用户程序使用任务堆栈,OS使用主堆栈,不会互相干扰。不会因为用户程序导致OS崩溃。
STMDB R0!,{R4-R11}
保存R4-R11到PSP中。C语言表达是*(–R0)={R4-R11},R0中值先自减1,然后将R4-R11的值保存到该值所指向的地址中,即PSP中。
STMDB Rd!,{寄存器列表} 连续存储多个字到Rd中的地址值所指地址处。每次存储前,Rd先自减一次。
若是ISR是从从task0进来,那么此时task0的堆栈中已经保存了该任务的寄存器参数。保存完成后,当前任务堆栈中的内容如下(假设是task0)
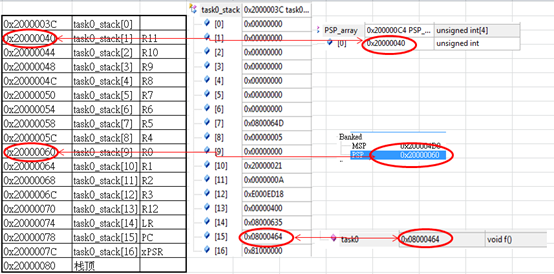
左边表格是预期值,右边是keil调试的实际值。可以看出,是一致的。在任务初始化时(步骤一),我们将PSP指向任务0的栈顶0x20000080。在进入PendSV之前,cortex-M3自动入栈八个值,此时PSP指向了0x20000060。然后我们再保存R4-R11到0x20000040~0x2000005C。
这样很容易看明白,如果需要下次再切换到task0,只需恢复R4~R11,再将PSP指向0x20000060即可。
测试例程:
#define HW32_REG(ADDRESS) (*((volatile unsigned long *)(ADDRESS)))
void USART1_Init(void);
void task0(void) ;
uint32_t curr_task=0; // 当前执行任务
uint32_t next_task=1; // 下一个任务
uint32_t task0_stack[17];
uint32_t task1_stack[17];
uint32_t PSP_array[4];
u8 task0_handle=1;
u8 task1_handle=1;
void task0(void)
{
while(1)
{
if(task0_handle==1)
{
printf("task0\n");
task0_handle=0;
task1_handle=1;
}
}
}
void task1(void)
{
while(1)
{
if(task1_handle==1)
{
printf("task1\n");
task1_handle=0;
task0_handle=1;
}
}
}
__asm void SetPendSVPro(void)
{
NVIC_SYSPRI14 EQU 0xE000ED22
NVIC_PENDSV_PRI EQU 0xFF
LDR R1, =NVIC_PENDSV_PRI
LDR R0, =NVIC_SYSPRI14
STRB R1, [R0]
BX LR
}
__asm void TriggerPendSV(void)
{
NVIC_INT_CTRL EQU 0xE000ED04
NVIC_PENDSVSET EQU 0x10000000
LDR R0, =NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
BX LR
}
int main(void)
{
SetPendSVPro();
LED_Init();
uart_init(115200);
printf("OS test\n");
PSP_array[0] = ((unsigned int) task0_stack) + (sizeof task0_stack) - 16*4;
//PSP_array中存储的为task0_stack数组的尾地址-16*4, 即task0_stack[1]的地址
HW32_REG((PSP_array[0] + (14*4))) = (unsigned long) task0; /* PC */
//task0的PC存储在task0_stack[1]地址+14*4, 即task0_stack[15]的地址中
HW32_REG((PSP_array[0] + (15*4))) = 0x01000000; /* xPSR */
PSP_array[1] = ((unsigned int) task1_stack) + (sizeof task1_stack) - 16*4;
HW32_REG((PSP_array[1] + (14*4))) = (unsigned long) task1; /* PC */
HW32_REG((PSP_array[1] + (15*4))) = 0x01000000; /* xPSR */
/* 任务0先执行 */
curr_task = 0;
/* 设置PSP指向任务0堆栈的栈顶 */
__set_PSP((PSP_array[curr_task] + 16*4));
SysTick_Config(9000000);
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);//72/8=9MHZ
/* 使用堆栈指针,非特权级状态 */
__set_CONTROL(0x3);
/* 改变CONTROL后执行ISB (architectural recommendation) */
__ISB();
/* 启动任务0 */
task0();
//LED0=0;
while(1);
}
__asm void PendSV_Handler(void)
{
// 保存当前任务的寄存器内容
MRS R0, PSP // 得到PSP R0 = PSP
// xPSR, PC, LR, R12, R0-R3已自动保存
STMDB R0!,{R4-R11}// 保存R4-R11共8个寄存器得到当前任务堆栈
// 加载下一个任务的内容
LDR R1,=__cpp(&curr_task)
LDR R3,=__cpp(&PSP_array)
LDR R4,=__cpp(&next_task)
LDR R4,[R4] // 得到下一个任务的ID
STR R4,[R1] // 设置 curr_task = next_task
LDR R0,[R3, R4, LSL #2] // 从PSP_array中获取PSP的值
LDMIA R0!,{R4-R11}// 将任务堆栈中的数值加载到R4-R11中
//ADDS R0, R0, #0x20
MSR PSP, R0 // 设置PSP指向此任务
// ORR LR, LR, #0x04
BX LR // 返回
// xPSR, PC, LR, R12, R0-R3会自动的恢复
ALIGN 4
}
void SysTick_Handler(void)
{
LED0=!LED0;//位带操作
if(curr_task==0)
next_task=1;
else
next_task=0;
TriggerPendSV();
}
串口输出:
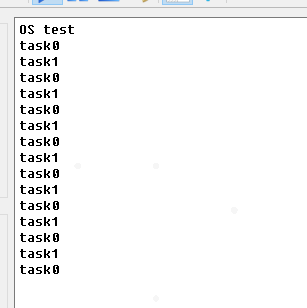
可以看到在任务0和任务1之间来回切换。
FreeRTOS任务切换源码分析
上下文(任务)切换被触发的场合大致分为:
● 可以执行一个系统调用
● 系统滴答定时器(SysTick)中断。
执行系统调用就是执行 FreeRTOS 系统提供的相关 API 函数,比如任务切换函数taskYIELD(),这些 API 函数和任务切换函数
taskYIELD()都统称为系统调用。
函数 taskYIELD()其实就是个宏,在文件 task.h 中有如下定义:
#define taskYIELD() portYIELD()
函数 portYIELD()也是个宏,在文件 portmacro.h 中有如下定义
#define portYIELD() \
{ \
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; \ //通过向中断控制和壮态寄存器 ICSR 的 bit28 写入 1 挂起 PendSV 来启动 PendSV 中断。这样就可以在 PendSV 中断服务函数中进行任务切换了。
\
__dsb( portSY_FULL_READ_WRITE ); \
__isb( portSY_FULL_READ_WRITE ); \
}
中断级的任务切换函数为 portYIELD_FROM_ISR(),定义如下:
#define portYIELD_FROM_ISR( x ) portEND_SWITCHING_ISR( x )
#define portEND_SWITCHING_ISR( xSwitchRequired ) \
if( xSwitchRequired != pdFALSE ) portYIELD() //可以看出 portYIELD_FROM_ISR()最终也是通过调用函数 portYIELD()来完成任务切换的。
系统滴答定时器(SysTick)中断
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
xPortSysTickHandler();
}
}
xPortSysTickHandler()源码如下:
void xPortSysTickHandler( void )
{
vPortRaiseBASEPRI(); //关闭中断
{
if( xTaskIncrementTick() != pdFALSE ) //增加时钟计数器 xTickCount 的值
{
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; //通过向中断控制和壮态寄存器 ICSR 的 bit28 写入 1 挂起 PendSV 来启动 PendSV 中断。这样就可以在 PendSV 中断服务函数中进行任务切换了。
}
}
vPortClearBASEPRIFromISR(); //打开中断
}
真正的任务切换代码在PendSV中断函数中,
FreeRTOS做了如下函数重定义
#define xPortPendSVHandler PendSV_Handler
xPortPendSVHandler函数如下 (汇编 port.c)
__asm void xPortPendSVHandler( void )
{
extern uxCriticalNesting;
extern pxCurrentTCB;
extern vTaskSwitchContext;
PRESERVE8
mrs r0, psp //读取进程栈指针,保存在寄存器 R0 里面。
isb
ldr r3, =pxCurrentTCB //获取当前任务的任务控制块
ldr r2, [r3] //接上,并将任务控制块的地址保存在寄存器 R2 里面
tst r14, #0x10 //判断任务是否使用了 FPU,如果任务使用了 FPU 的话在进行任务切换的时候就
it eq //需要将 FPU 寄存器 s16~s31 手动保存到任务堆栈中,其中 s0~s15 和 FPSCR 是自动保存的
vstmdbeq r0!, {s16-s31} //保存 s16~s31 这 16 个 FPU 寄存器
stmdb r0!, {r4-r11, r14} //保存 r4~r11 和 R14 这几个寄存器的值
str r0, [r2] //将寄存器 R0 的值写入到寄存器 R2 所保存的地址中去,也就是将新的栈顶保存在任务控制块的第一个字段中。
stmdb sp!, {r3} //将寄存器 R3 的值临时压栈,寄存器 R3 中保存了当前任务的任务控制块
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY //关闭中断,进入临界区
msr basepri, r0 //关闭中断,进入临界区
dsb
isb
bl vTaskSwitchContext //调用函数 vTaskSwitchContext(),此函数用来获取下一个要运行的任务,并将pxCurrentTCB 更新为这个要运行的任务
mov r0, #0 //打开中断,退出临界区。
msr basepri, r0 //打开中断,退出临界区。
ldmia sp!, {r3} //刚刚保存的寄存器 R3 的值出栈,恢复寄存器 R3 的值
ldr r1, [r3] //获取新的要运行的任务的任务堆栈栈顶,
ldr r0, [r1] //接上,并将栈顶保存在寄存器 R0 中
ldmia r0!, {r4-r11, r14} //R4~R11,R14 出栈,也就是即将运行的任务的现场
tst r14, #0x10 //判断即将运行的任务是否有使用到 FPU,如果有的话还需要手工恢复 FPU的 s16~s31 寄存器。
it eq //同上
vldmiaeq r0!, {s16-s31} //同上
msr psp, r0 //更新进程栈指针 PSP 的值
isb
bx r14 //执行此行代码以后硬件自动恢复寄存器 R0~R3、R12、LR、PC 和 xPSR 的值,确定
//异常返回以后应该进入处理器模式还是进程模式,使用主栈指针(MSP)还是进程栈指针(PSP)。
//很明显这里会进入进程模式,并且使用进程栈指针(PSP),寄存器 PC 值会被恢复为即将运行的
//任务的任务函数,新的任务开始运行!至此,任务切换成功。
}
补充:
SysTick和PendSV的优先级实际到底是多少
https://zhuge.blog.csdn.net/article/details/124830031
在FreeRTOS中,
一般来说,我们在main函数最后,是开启调度器:vTaskStartScheduler()
然后这个函数中调用了xPortStartScheduler(),这才是真正做开启调度器相关操作,在port.c中
xPortStartScheduler()中对pendsv和SysTick的优先级进行了设置。

portNVIC_SYSPRI2_REG是内核的寄存器,高16位的两个字节分别是PendSV和SysTick的优先级设置
#define portNVIC_SYSPRI2_REG ( * ( ( volatile uint32_t * ) 0xe000ed20 ) )

然后portNVIC_PENDSV_PRI 和 portNVIC_SYSTICK_PRI 分别的定义:
#define portNVIC_PENDSV_PRI ( ( ( uint32_t ) configKERNEL_INTERRUPT_PRIORITY ) << 16UL )
#define portNVIC_SYSTICK_PRI ( ( ( uint32_t ) configKERNEL_INTERRUPT_PRIORITY ) << 24UL )
那么关键看configKERNEL_INTERRUPT_PRIORITY这个宏定义:
#ifndef configKERNEL_INTERRUPT_PRIORITY
#define configKERNEL_INTERRUPT_PRIORITY 255
#endif
如果用户没有定义默认是255,其实是最低优先级,但这不实际,因为255是内核设计的最低优先级,但实际芯片没有给做那么多优先级
所以在FreeRTOSConfig.h文件中定义了:
#ifdef __NVIC_PRIO_BITS
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4
#endif
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 //中断最低优先级
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 //系统可管理的最高中断优先级
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
左移(8 - configPRIO_BITS)是因为只用了高4bit做优先级,这样看下来,实际PendSV和SysTick的优先级都设置成了15,而FreeRTOS要求用第四组优先级分组,所以15就是最低优先级。
以下对SysTick和PendSV的优先级设为最低的释疑:
【既然SysTick优先级最低,根本不会触发第一节说的SysTick抢别的低优先级IRQ在SysTick中断直接切任务导致IRQ没处理完就切回任务的用法fault,那还用PendSV有什么意义,直接在SysTick切换任务不就行?】
单从切任务这个事情来说,如果SysTick为最低优先级,确实可以在SysTick中直接切任务。但是OS并不止SysTick这一种情况需要切换任务,还在其他情况也要突然切任务。那如果把切任务这个事情只放在SysTick,那岂不是在临时要切任务时还得直接触发SysTick的中断,显然是不行的,SysTick作为按时按点中断的心跳,肯定不能随时进。所以单独把切任务的事情放在PendSV中,这样如果遇到临时要切任务的情况。只触发PendSV就行。SysTick依然不会乱(SysTick里有计数,必须定时进中断才能保证计数符合时间)
【PendSV用最低优先级这没什么说的,这关乎fault问题,第一节已经明确了,但是SysTick优先级如果最低,那么如果有频繁的高优先级IRQ中断怎么保证SysTick的节拍准时呢】
答:无解
操作系统的心跳节拍本质上讲,就是一个保证操作系统正常运行的节拍而已,就像人的心跳一样,有的人60次/分,有的人70次/分,有的人80次/分,没有唯一答案,你肯定也不会想着要让自己的心跳整齐划一的一直是66次/分。有个大概正常稳定的范围就可以了。嵌入式OS的时钟节拍,压根就不是精准的,也不需要太准,大概准就可以了,因为只要有周期性的节拍,就能保证周期性的调度。软件定时器也不是特别准的,一般用于【短时间】、对时间要求不严苛的场景。如果非要对时间要求的特别准,还是需要用硬件定时器实现的。
【针对上个问题,如果把SysTick优先级提高行吗?】
先看SysTick和PendSV的优先级都设为最低优先级的情况:
然后看Systick高优先级,PendSV低优先级的情况:
 因为SysTick的优先级最高,而且又是周期性的触发,会导致经常抢占外部IRQ,这就会导致外部IRQ响应变慢,这在一些对实时性要求高的,比如按键、断电中断等待,是不能接受的,你肯定不希望你的按键扫描体验卡顿。
因为SysTick的优先级最高,而且又是周期性的触发,会导致经常抢占外部IRQ,这就会导致外部IRQ响应变慢,这在一些对实时性要求高的,比如按键、断电中断等待,是不能接受的,你肯定不希望你的按键扫描体验卡顿。
所以,没有十全十美的解决方案,关键是要看我们更关注什么?对于CPU来说,嵌入式OS也是一个程序,跟普通的裸机程序是一样的,无非就是复杂一些,涉及到了手动切换堆栈、PC等高级操作而已,OS的优先级天生就没有外部中断的优先级高。
上述释疑观点部分参考【猪哥-嵌入式】:https://zhuge.blog.csdn.net/article/details/124789418
https://zhuge.blog.csdn.net/article/details/124830031
参考:
https://www.cnblogs.com/WeyneChen/p/4891885.html
https://www.cnblogs.com/god-of-death/p/14856578.html


















 1650
1650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











