








一. 关于A1电池

今天的主角是宇树的A1电池。该电池主要用在宇树的A1机器狗上,A1主打的是运动性能,最大持续奔跑速度可以达到3.3m/s (11.88km/h),是目前国内速度最快、最稳定的中小型四足机器人。之所以能跑得这么快,归功于A1的高级的动态平衡算法、高性能的扭矩电机以及强大的动力电池。手上刚好有一块A1电池,今天带大家拆解一下电池,学习一下A1电池的结构设计以及电路方案。

在拆解之前,先了解一下电池的相关参数:
| 参数 | 数值 |
|---|---|
| 电池类型 | 聚合物锂离子电池 |
| 产品重量 | 870g |
| 充电限制电压 | DC 25.2V |
| 额定容量 | 4200mAh 90.72Wh |
| 最大充电功率 | 100.8W |
二. 拆解过程

2.1 结构设计

电池的结构还是比较简单的。整体由上下两面外壳,电芯以及控制板组成,上壳与下壳通过热熔螺母和螺钉连接在一起。在上壳顶部还包含LED灯的输出通道以及一个按键,将其盖板打开,里面有一个弹簧卡扣设计,用于和电池仓的装配。
2.2 电路方案
电路主要由上下两块PCB组成:
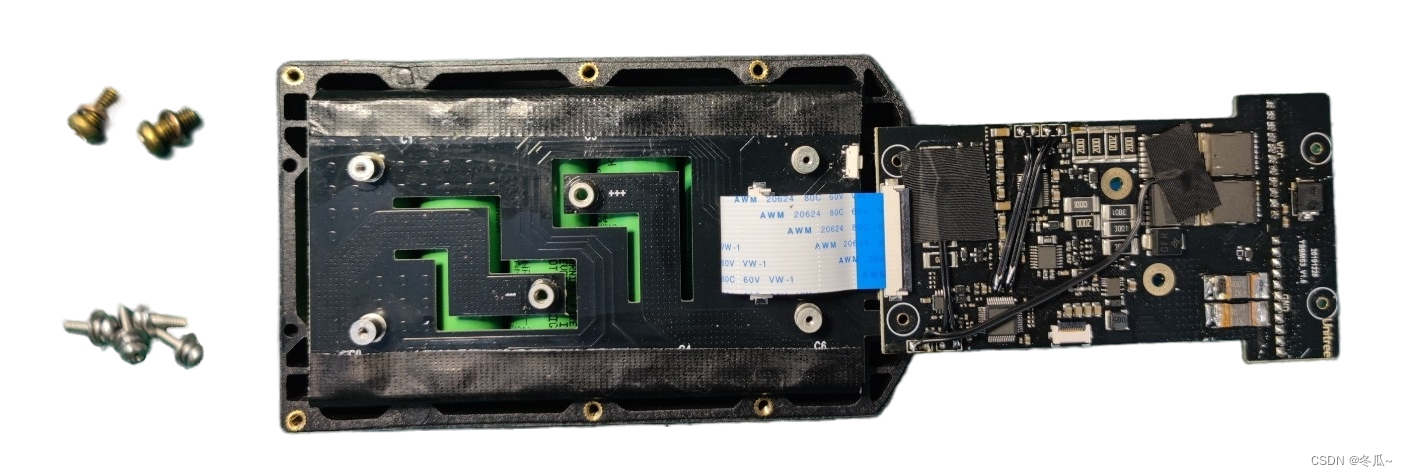
- 下层PCB电路: 下层的电路板主要负责与电池组相连,将电池组串联后的总电压通过中间的两根贴片螺母和螺钉传送至上层PCB中;同时还需要将电池组中单独电池的电压通过FPC排线传送至上层板,做电源管理用;板上还有4个LED灯以及两个按键,控制信号都是由上层电路板通过FPC排线传输下来。
- 上层PCB电路: 上层电路板就是主要负责电源管理。大多数IC芯片都做了保密处理,把丝印去掉了。大概组成就是MCU+前段模拟IC+电池管理控制器IC(像大疆的悟1的电池TB47用的方案就是MSP430+BQ78350+BQ76930,都是Ti的方案)。其中右图立起来的那四根黑线是温度传感器的探头,分别放在采样电阻、MOS管上面以及透过底层电路板放在电池组的缝隙里。

2.3 电芯设计

电芯使用的是常用的18650封装。采用2并6串的形式组装,假设每个电池充满电是4.2V的话,总电压可以达到25.2V,每个电池的容量为2100mAh,总容量就可以达到4200mAh,且两两并联的方式也让电池有了更强劲的放电能力。

三. 相关链接
- 宇树官网:https://www.unitree.com/
- 宇树官网-A1电池:https://www.unitree.com/a1battery



















 3246
3246

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











