







目录
一、四足机器人行业现状与宇树科技定位
近年来,四足机器人市场呈现爆发式增长,根据MarketsandMarkets最新报告显示,2023年全球四足机器人市场规模已达12.4亿美元,预计到2028年将增长至36.8亿美元,年复合增长率高达24.3%。在这一领域中,中国厂商宇树科技(Unitree)凭借其创新的产品设计和亲民的价格策略,已经成为消费级市场的领军企业。

主要四足机器人产品对比
| 型号 | 定位 | 最大负载 | 续航时间 | 关节自由度 | 价格区间 |
|---|---|---|---|---|---|
| Unitree Go2 | 消费级 | 5kg | 1-2小时 | 12个 | ¥9,999起 |
| Boston Dynamics Spot | 工业级 | 14kg | 90分钟 | 12个 | $74,500起 |
| ANYmal C | 科研级 | 10kg | 2小时 | 12个 | €150,000起 |
| DeepRobotics X20 | 安防级 | 20kg | 3小时 | 12个 | ¥200,000起 |
宇树科技产品线覆盖了从消费级到工业级的多个细分市场:
- Go系列:面向普通消费者的入门产品
- A系列:针对科研机构和高校的研发平台
- B系列:工业级应用,如巡检、安防等场景
二、Go2机器狗拆解全记录

1. 安全拆解第一步:电池系统分析
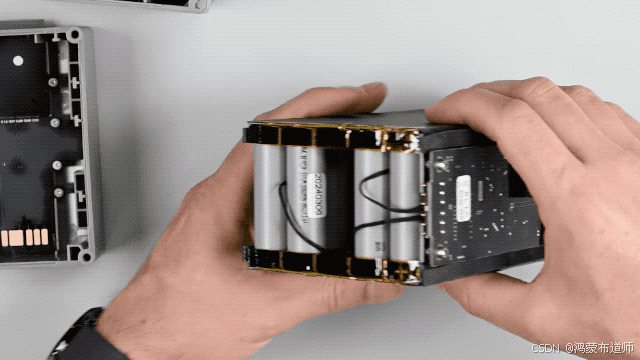
拆解从电池组开始,这是所有电子设备维修的标准流程。Go2的电池仓位于机器狗侧腰处,采用梅花(Torx)螺丝固定,需要专用工具才能打开。
电池组技术参数:
- 电芯类型:18650锂离子电池
- 电芯数量:32节
- 标准容量:8000mAh
- 可选大容量:15000mAh
- 电压设计:14.8V(4S8P)
电池管理系统(BMS)位于电池组后部,通过Pogo Pin连接外部的电量指示灯。这种设计既保证了连接的可靠性,又便于快速更换电池。值得注意的是,BMS芯片上的型号标识被激光蚀刻去除,这可能是出于知识产权保护的考虑。
2. 核心控制系统揭秘
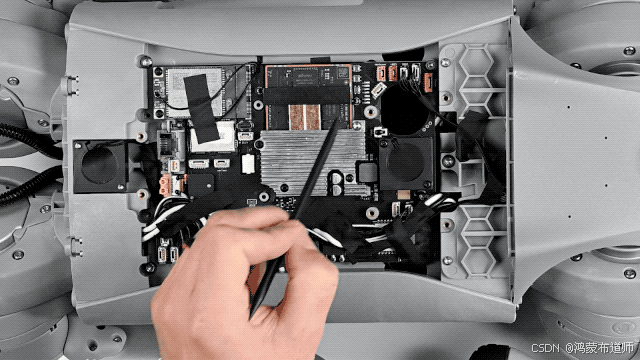
移除顶盖后,机器狗的"大脑"部分一览无余:
主控系统组成:
- 处理器:疑似NVIDIA Jetson系列(基于散热设计推测)
- 无线通信:集成Wi-Fi/蓝牙模块
- 扩展接口:预留多个风扇接口和调试端口
- 电源管理:采用XT30高电流连接器
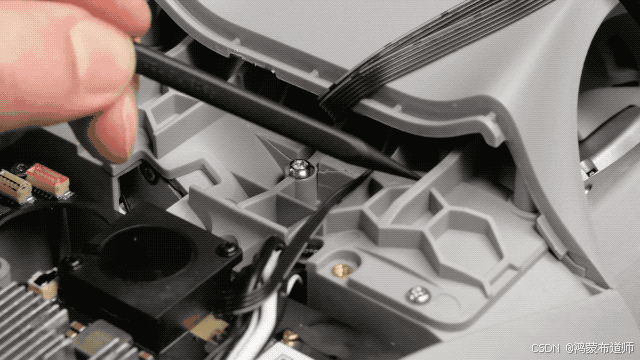
特别值得关注的是主板上密集的布基胶带应用,这种看似"低端"的材料实际上在抗振动和防松脱方面表现出色。在动态运动中,它能有效固定线缆,防止连接器因频繁震动而松动。
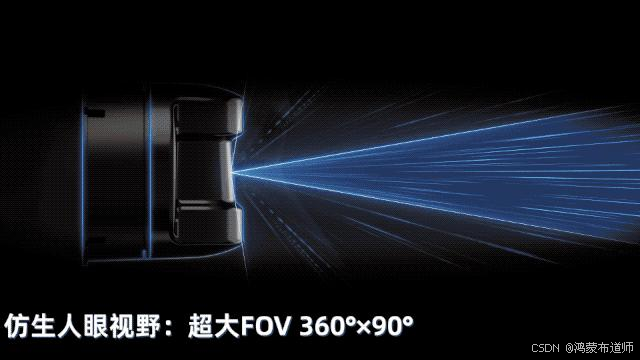
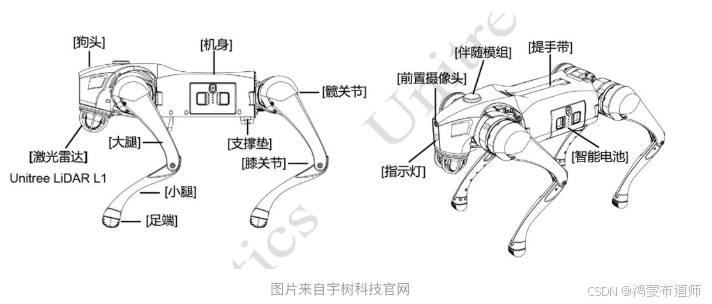
3. 感知系统的创新设计
Go2的环境感知核心是Unitree自主研发的4D LiDAR-L1激光雷达,其技术特点包括:
激光雷达性能指标:
| 参数 | 数值 |
|---|---|
| 测距范围 | 0.05m-30m(90%反射率) |
| 采样频率 | 21600次/秒 |
| 视场角(FOV) | 水平360°/垂直90° |
| 工作温度 | -10℃至60℃ |
| 重量 | 约200g |
激光雷达的保护笼采用厚实焊接钢材制成,这种"牺牲性"设计能在撞击时优先保护内部昂贵的传感器。据估算,仅这颗LiDAR的成本就占整机售价的15-20%。
注:关于"4D"定义的争议:宇树将灰度信息作为第四维度,与传统的时间维度定义有所不同,这确实存在一定的营销成分。
三、运动控制系统的工程奥秘
Go2的灵活运动能力源自其精密的关节电机设计。整机共配置12个高精度伺服电机,分布如下:
腿部关节配置:
- 髋关节:2个自由度(俯仰/横滚)
- 膝关节:1个自由度
- 踝关节:1个自由度
拆解发现,电机组采用了创新的"机械保险"设计:
- 关键受力部位使用CNC加工金属件
- 非关键连接点采用工程塑料
- 预设薄弱环节作为"机械保险丝"
这种设计理念类似于汽车碰撞吸能区,当受到超出设计范围的冲击时,塑料连接件会优先断裂,从而保护更昂贵的核心部件。维修时只需更换低成本塑料件,大幅降低了维护成本。
倒立行走的实现原理
通过CT扫描和物理拆解,我们还原了Go2实现高难度动作的技术路径:
- 动力系统:高扭矩密度电机配合精密减速器
- 控制算法:基于MPC(模型预测控制)的实时步态调整
- 传感器融合:IMU+激光雷达+关节编码器多数据融合
- 机械设计:低重心分布与高刚度腿部结构
关键技术创新点:
- 采用互锁齿轮机制提高传动效率
- 电容阵列就近布置降低线路阻抗
- 模块化关节设计便于维护更换
四、可维修性评估与改进建议
基于iFixit标准的可维修性评分(10分制):
| 评估项目 | 得分 | 评价 |
|---|---|---|
| 拆解难度 | 7 | 需要专用工具但流程清晰 |
| 模块化程度 | 8 | 主要功能模块独立可更换 |
| 维修文档 | 5 | 官方提供有限技术资料 |
| 备件可获得性 | 6 | 核心部件需官方渠道 |
| 设计寿命 | 7 | 关键部件考虑磨损更换 |
优势:
- 连接器普遍采用防呆设计
- 主要功能区域物理隔离
- 易损件(如足端)可单独更换
- 预留Pro版升级空间
待改进:
- 激光雷达埋藏过深,更换繁琐
- 颈部结构强度不足
- 部分接插件可靠性有待验证
- 散热系统存在灰尘积聚风险
五、消费级机器人的未来展望
Go2作为万元级消费产品,其设计取舍反映了当前技术条件下的工程智慧:
- 成本控制:在关键性能不妥协的前提下,通过材料选择和制造工艺优化降低成本
- 可靠性设计:用"土办法"解决实际问题,如布基胶带固定线缆
- 用户体验:平衡专业功能与易用性,降低使用门槛
行业发展趋势预测:
- 2024-2026年消费级市场将出现更多<10,000元产品
- AI赋能将大幅提升自主决策能力
- 能源密度提升有望解决续航瓶颈
- 模块化设计成为行业标准
对于科技爱好者而言,Go2提供了一个难得的实践平台。它不仅是一件"酷玩具",更是了解先进机器人技术的窗口。随着开源生态的完善和第三方开发工具的丰富,这类产品的可玩性和实用性还将持续提升。
"消费级机器人正在重复PC行业的发展路径——从专业工具到大众消费品,价格下降和功能增强的螺旋上升将重塑整个产业。" —— 机器人领域专家评论
延伸阅读推荐:
- 《四足机器人运动控制算法详解》
- [宇树科技官方开发者文档]
- 《机器人感知系统设计指南》
- 最新IEEE机器人与自动化论文精选

















 1484
1484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









