







介绍
本例介绍了由于目标旋转引起的雷达回波中的微多普勒效应的基本概念。你可以用微多普勒信号来帮助识别目标。由于多普勒效应,运动目标在雷达回波中引起频移。然而,由于大多数目标不是刚体,除了平台运动外,目标的不同部位经常存在其他振动和旋转。例如,当直升机飞行时,它的叶片旋转,或当一个人走路时,他们的手臂自然摆动。这些微尺度的运动产生额外的多普勒位移,称为微多普勒效应,这在识别目标特征时很有用。在第一个应用中,微多普勒信号被用来确定直升机的叶片速度。在第二种应用中,微多普勒信号用于识别汽车雷达回程中的行人。
估算直升机桨叶速度
考虑一架有四个旋翼叶片的直升机,假设雷达位于原点。指定直升机的位置为(500,0,500),这将设置其与雷达的距离,单位为米,速度为(60,0,0)米/秒。
在这个模拟中,直升机是由五个散射体建模的: 旋转中心和四个叶片的尖端。旋转中心随直升机机体移动。每个叶片尖端与相邻叶片尖端的距离为90度。叶片以每秒4转的恒定速度旋转。每片刀片臂长6.5米。 假设四个叶尖具有相同的反射率,但旋转中心的反射率较强。
Nblades = 4;
bladeang = (0:Nblades-1)*2*pi/Nblades;
bladelen = 6.5;
bladerate = deg2rad(4*360); % rps -> rad/sec直升机回波模拟
假设雷达工作在5 GHz,简单方波脉冲。脉冲重复频率为20khz。为了简单起见,假设信号在自由空间中传播。每一次脉冲,直升机就会沿着轨道移动。同时,叶片保持旋转,叶片尖端引入额外的位移和角速度。
fs = 1e6;
prf = 2e4;
lambda = c/fc;
wav = phased.RectangularWaveform('SampleRate',fs,'PulseWidth',2e-6,'PRF',prf);
ura = phased.URA('Size',4,'ElementSpacing',lambda/2);
tx = phased.Transmitter;
rx = phased.ReceiverPreamp;
env = phased.FreeSpace('PropagationSpeed',c,'OperatingFrequency',fc,...
'TwoWayPropagation',true,'SampleRate',fs);
txant = phased.Radiator('Sensor',ura,'PropagationSpeed',c,'OperatingFrequency',fc);
rxant = phased.Collector('Sensor',ura,'PropagationSpeed',c,'OperatingFrequency',fc);下面的图显示了使用接收信号的前128个脉冲的距离多普勒响应。你可以在大约700米的目标距离上看到三次返回:
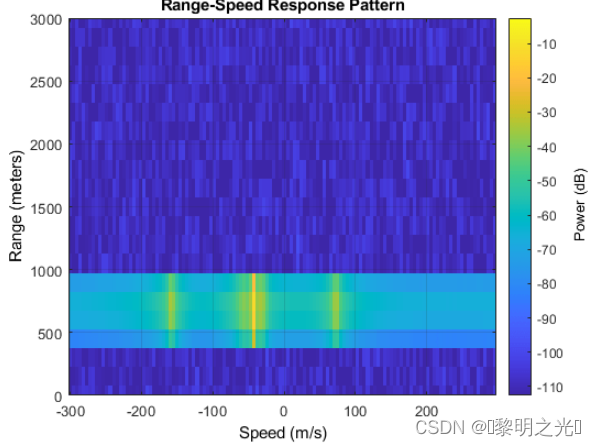
虽然这些雷达回波看起来来自不同的目标,但实际上它们都来自同一个目标。中心回波来自旋转中心,比其他两种回波要强得多。这是因为直升机身体的反射更强。图中显示旋转中心的速度为-40米/秒。该值与目标径向速度的真实值相匹配。当它们以最大速度接近或离开目标时,其他两个返回来自叶片的尖端。从图中可以看出,这两个接近和离开探测对应的速度分别约为75米/秒和-160米/秒。
桨叶的微多普勒分析
微多普勒效应的时频表征可以揭示更多的信息。因此我们在检测到的目标距离库中构造一个时频表示,通过时频域切换可以得到如下所示的时频域信息图像:
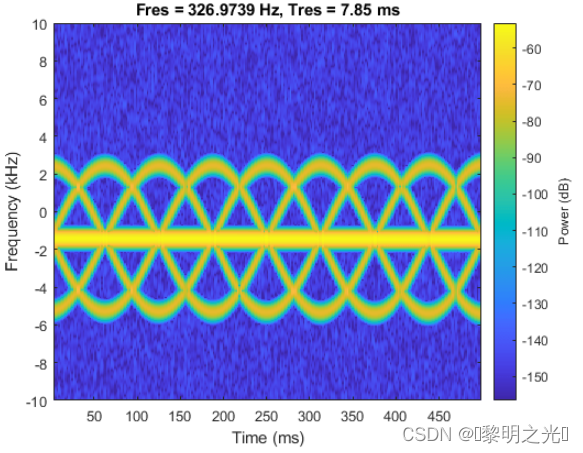
图中显示了叶尖在恒定多普勒频移附近引起的微多普勒调制。图像显示,每个叶尖都引入了一个类正弦多普勒调制。如下图所示,在正弦信号的每个周期内,有三个额外的正弦信号在相等的距离上出现。这种外观表明直升机装备有四个等间距的桨叶。
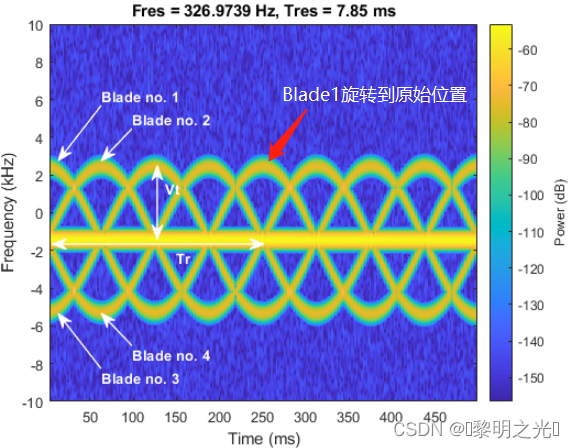
除了叶片的数量,图像还显示每个正弦信号的周期Tr约为250 ms。这个值意味着刀片在250毫秒后返回到它原来的位置。在这种情况下,直升机的角速度约为每秒4转,这与模拟参数相匹配。 该图像还显示了叶片的尖端速度Vt,它可以由最大多普勒得到。
Vt_detect = dop2speed(4e3,c/fc)/2
ans:
Vt_detect =
120这个值是沿径向的最大叶尖速度。为了获得正确的最大尖端速度,必须考虑相对方向。由于叶片旋转成圆形,检测不受方位角的影响。仅修正仰角以获得最大尖端速度结果。
doa = phased.MUSICEstimator2D('SensorArray',ura,'OperatingFrequency',fc,...
'PropagationSpeed',c,'DOAOutputPort',true,'ElevationScanAngles',-90:90);
[~,ang_est] = doa(xr);
Vt_est = Vt_detect/cosd(ang_est(2))
ans:
Vt_est =
164.0793根据修正后的最大叶尖速度和叶片旋转速率,计算叶片长度。
bladelen_est = Vt_est/(bladerate_est*2*pi)
ans:
bladelen_est =
6.5285注意,结果与模拟参数6.5 m匹配。诸如叶片数量、叶片长度和叶片转速等信息可以帮助识别直升机的型号。

















 717
717

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









