







汽车悬架系统在传递车轮与车架之间力的同时,也缓和了大量来自路面的冲击载荷,减小了由此引起的承载系统的振动,保证了汽车行驶的平顺性、理想的运动特性和操纵稳定性。由于汽车前悬架部件之间运动关系复杂,一般都设计成主销内倾和后倾,并且控制臂轴也大多倾斜布置,给悬架的运动学、动力学分析带来很大困难。以某汽车麦弗逊前悬架为例,拟采用双轮同向激振方式对其进行仿真计算和优化分析,研究其在汽车运行过程中汽车麦弗逊前悬架的动力学特性,以改善悬架系统性能。
-
汽车麦弗逊前悬架模型的建立
通过逆向工程和试验,得到了汽车前悬架几何参数、弹簧阻尼元件特性以及关键连接部位弹性衬套刚度等,麦弗逊前悬架系统的主要参数( 整备质量状态) 如表1。
表1汽车悬架系统主要参数
| 整车参数 | 整备质量 | 1320kg | 质心高度 | 475mm |
| 轴距 | 2800mm | 前轴/后轴荷 | 720/600kg | |
| 驱动率 | 前轮/100% | 制动率 | 前轮/70% | |
| 轮胎自由半径 | 310mm | 轮胎垂向刚度 | 230N/mm | |
| 前悬架 | 主销后倾角 | 4°34′ | 主销内倾角 | 7°23′ |
| 外倾角 | 0.31° | 前束角 | 0.47° | |
| 后悬架 | 外倾角 | -1.3° | 前束角 | 0.65° |
对模型的建立作如下假设: 悬架中所有零部件都认为是刚体; 减振器简化为线性弹簧和阻尼; 各运动副内的摩擦力忽略不计; 轮胎简化为刚性体。创建的模型如图 1。运用 ADAMS /CAR 模块建立与表1相对应的汽车前悬架的运动学模型,具体的模型如图 1 所示。
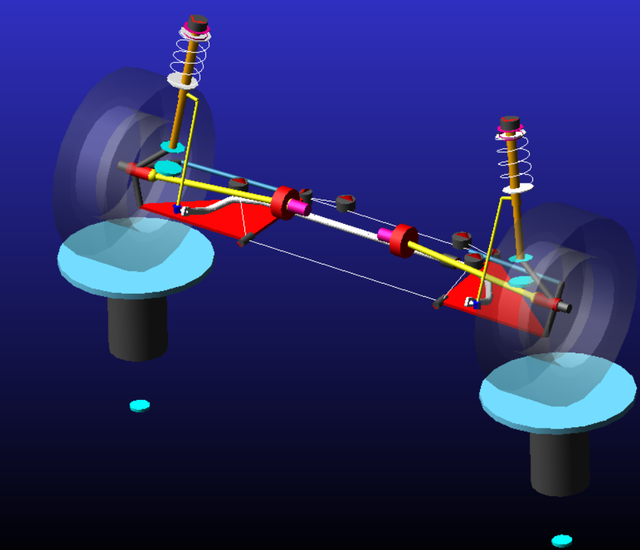
图1 麦弗逊悬架多体动力学模型
-
麦弗逊悬架运动学仿真分析
根据前轮上下跳动量,采用双轮同向激振方式设置激励方程,车轮的上下跳动行程为 0-150mm。此驱动函数用来模拟车轮通过不平路面时的情景。仿真结果如图2 -图3所示。
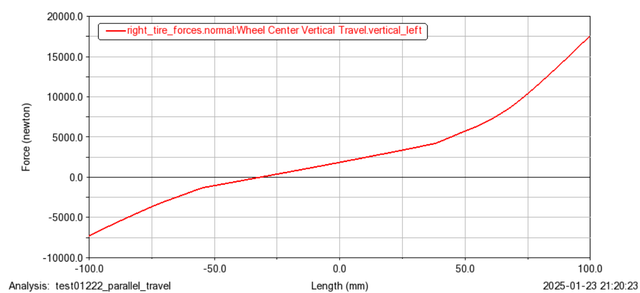
图2 前悬架轮荷随车轮跳动的变化曲线
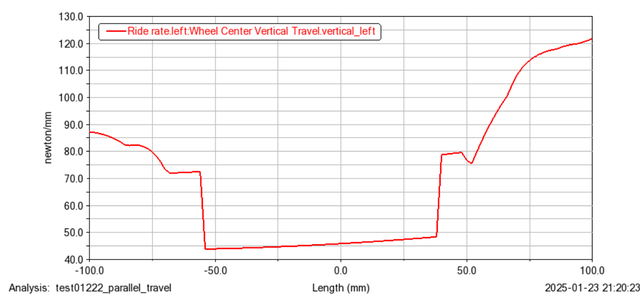
图3 前悬架垂向刚度随车轮跳动的变化曲线
静平衡时,汽车前悬架垂向刚度为45.87 N/ mm,限位块发生作用垂向刚度变为80N/mm 左右。
-
四轮定位参数仿真
主销后倾角:静平衡时,汽车主销后倾角对应的值为7.39°,该值与汽车给定的主销后倾角 4°34' 相差约 3°,这主要是由于整车姿态角以及硬点坐标的准确性造成的。当车轮上跳时,每压缩10 mm,后倾角的变化范围为0.0277°-0.011°。从图4中可以看出每压缩10 mm,后倾角变化约0.0335°,其主销后倾角随车轮跳动的具体变化如图4所示。
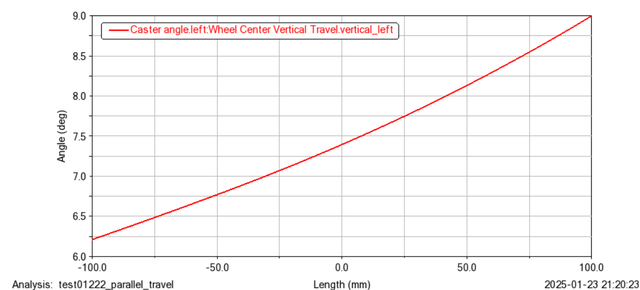
图4 主销后倾角随车轮跳动的变化曲线
主销内倾角:静平衡时,汽车主销内倾角对应的值为7°21′,与汽车给定的主销内倾角 7°23′基本一致。主销内倾角的存在能够提高转向轻便性和制动稳定性,通常希望其变化越小越好,车轮跳动±40 mm对应内倾角变化2.14°,其主销内倾角随车轮跳动的具体变化如图5所示。
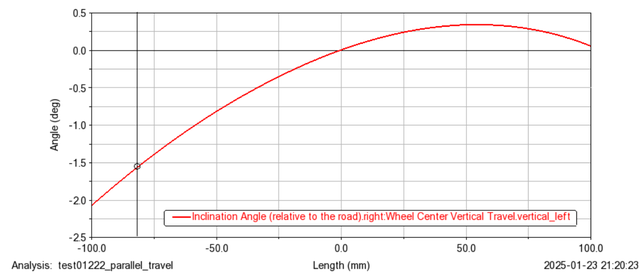
图4 主销内倾角随车轮跳动的变化曲线
车轮外倾角:静平衡位置时,汽车车轮外倾角对应的值为-0.73°,外倾角的变化应考虑操纵稳定性和轮胎的磨损两方面因素。轮跳每变化25mm前束角变化应在-0.4-0.6°之间,且一般希望前悬架外倾角变化量为负值。
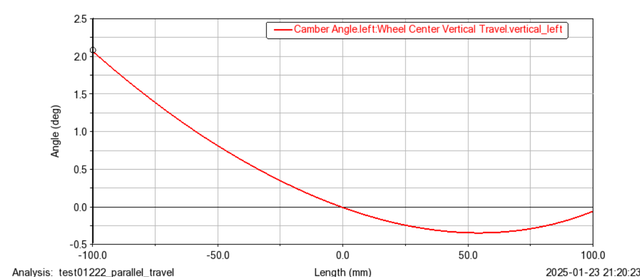
图5 外倾角随车轮跳动的变化曲线
车轮前束角:静平衡时,汽车对应的前束角为0.31°,通常希望前束角变化小一些好,且尽可能呈现线性变化趋势。轮跳每变化25mm前束角变化应在0.1°-0.2°之间,且一般希望前束角值的变化量为负值,这样将会有利于增加不足转向特性。
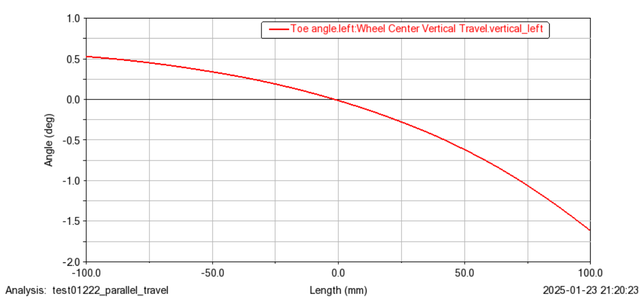
图6 前束角随车轮跳动的变化曲线
轮距的变化:轮距随车轮跳动变化曲线如图7所示。这里 的轮距测量点为车轮中心。
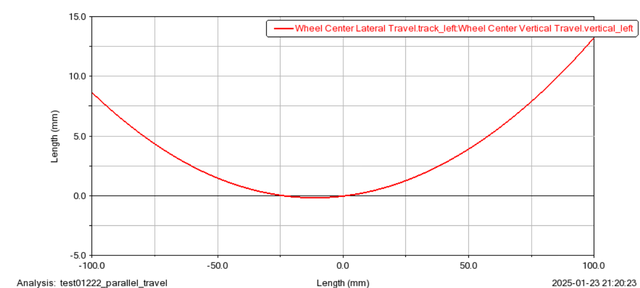
图7 前束角随车轮跳动的变化曲线
通常希望轮距的变化要小些,以减少轮胎的磨损。从图中可以看出,车轮向上跳动时轮距的变化更小一些,这样可以减小载荷增加时轮胎的磨损,转向断开点向外移30mm后轮距变化对应的值基本不变。
4.总结
本文研究的车轮跳动过程中车轮定位参数与轮胎磨损的关系,以及定位参数相互之间的影响将为汽车的初始设计提供可靠的技术依据,有效地减小车轮侧滑,降低轮胎磨损,提高汽车转向的轻便性和稳定性。


















 5753
5753

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











