









摘要:软体机械臂由于其运动的非线性、时滞性与迟滞性而难以控制,而在多段软体机械臂(MSCA)内,其各段间的驱动、传感和运动的耦合更增加了控制难度。但同时,由于MSCA的各段可以相对独立地驱动,这类机械臂可以实现末端位姿控制、形状控制、控制过程中自动避障、实时交互等复杂控制任务。本文提出了一种利用双向循环神经网络(biLSTM)对于MSCA构型的规划与控制的策略,该方法即使运用不准确的内部传感信号也能实现上述复杂任务。
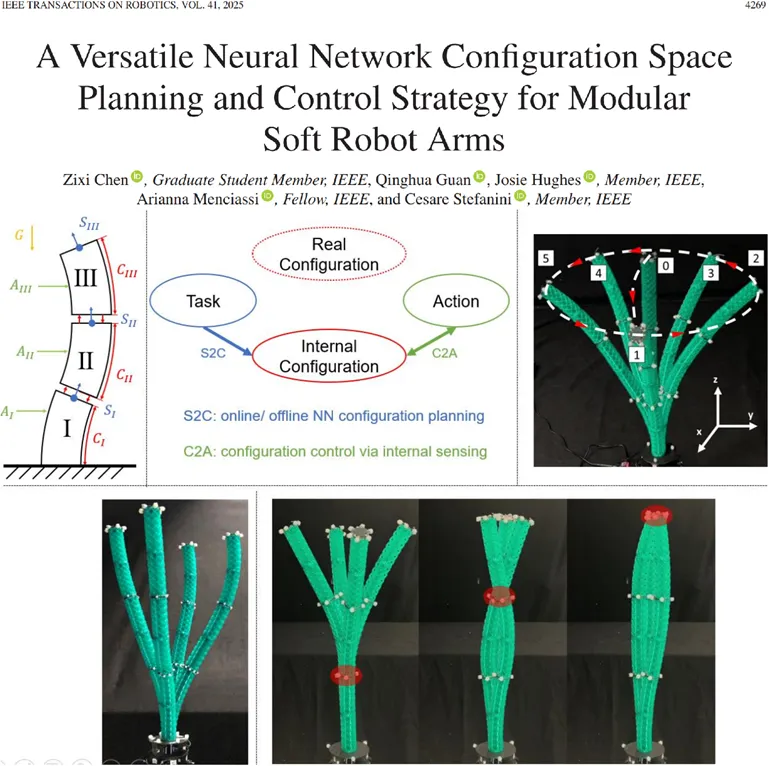
图1. MSCA 运动示意图与实体实验
方法:
本文针对MSCA提出了多功能控制器,首先分析多段软体机器人的运动逻辑,如图1所示,各段的驱动量(A)直接影响各段的构型©,同时其构型还受到相邻段的构型和重力的影响,最终所有段的构型共同决定MSCA的状态(S),如各段的位置、姿态和整体形状。对于状态空间到构型空间的规划(S2C),本文提出了一个以biLSTM作为正向运动学模型(NN_C2S)的优化问题
其中损失函数的各个项分别为了减小目标与实际位置差距(Lp)、减小目标与实际姿态差距(Lo)、增大障碍物与实际位置距离(Lob)、减少每步构型变化(Ld)。需要注意的是,biLSTM运动学模型不是以准确的各段形变代表配型(real configuration),而是如图1所示,以并不准确的、受段间耦合影响的内部传感估算的形变代表配型(internal configuration).
在根据状态空间的目标规划了目标配型后,接下来我们实现从配型到驱动的控制(C2A)。由于biLSTM与MSCA有着同样的段间耦合特点(如图2所示),基于我们过去的工作,我们利用biLSTM实现MSCA的配型控制。
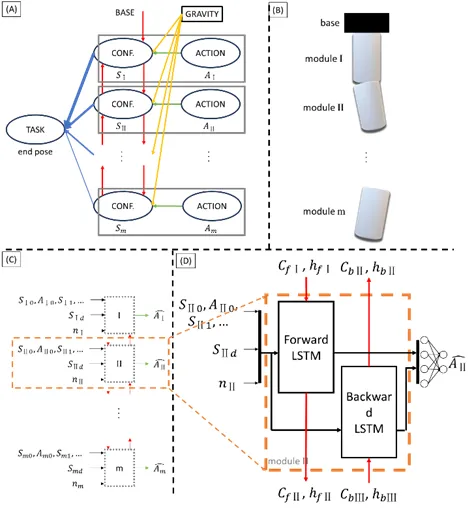
图2. (A) MSCA 运动框图。(B)MSCA示意图。(C)biLSTM控制器与(D)单个单元示意图。
使用的线驱机器人的不可压缩性给每段的驱动量(线长)进行了约束,因此我们提出了一个激活层来满足每段的三个驱动量的约束与范围要求。
实验结果:
首先进行基础任务的实验并与基于常曲率模型(PCC)的方法进行比较。在基础任务中,我们控制机器人末端位置进行轨迹追踪,并在此基础上控制俯仰角与偏航角。我们的方法比PCC在各个任务里都有更低的误差,MSCA运动如图3和视频所示。
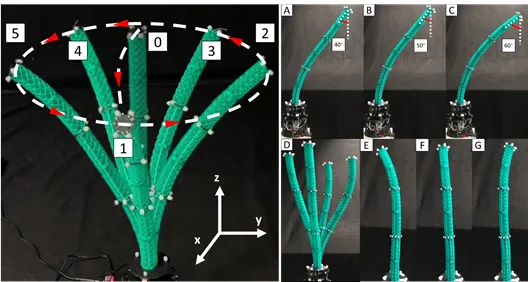
图3. MSCA实现末端位置和姿态控制。
除了基础任务,我们的方法还可以实现一些复杂任务。考虑到MSCA适合在手术、发动机维修等有位置要求的任务中使用,我们限制某些位置不变的情况下驱动机械臂,运动如图4与视频所示。
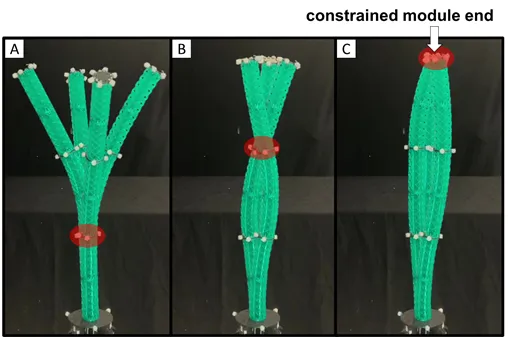
图4. MSCA实现位置限制控制。
除此之外,我们的方法还可以实现避障与追踪。在图5中,MSCA被要求接触红色目标,我们不断在原轨迹上放置蓝色障碍物使其对于轨迹进行重新规划。
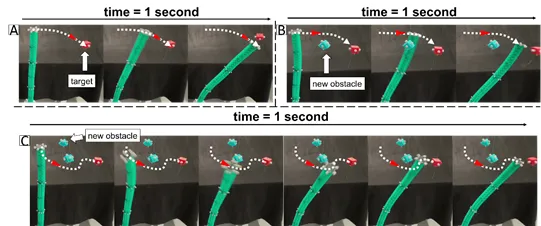
图5. MSCA实现避障。
在此基础上,我们的方法还可以实现线上追踪和避障,如图6和视频所示。
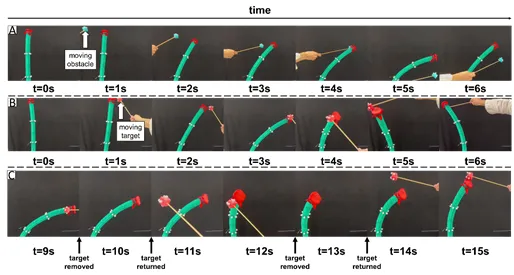
图6. MSCA实现线上追踪与避障。
总结:
在这篇论文中,我们基于MSCA的段间耦合提出了利用biLSTM的多功能规划与控制策略,该策略可以实现MSCA的末端位姿控制、位置限制控制、线上避障与追踪。在以后的工作中,我们计划基于物理模型对工作空间进行分析,以在控制前验证目标位姿的可行性。同时我们计划引入不同的传感器以提高配型准确度。

















 3967
3967

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









