







感谢《机器人工程师进阶之路:matlab-robotics-toolbox安装方法》
目录
一、matlab-robotics-toolbox安装方法
【来自知乎】:
Matlab中关于机器人的应用程序还是蛮多的。Peter为了方便教学和研发,他和他的团队开发了Robotics Toolbox这么一个工具箱。
工具箱介绍和安装方法都在下面这个链接中可以找到 https://petercorke.com/toolboxe![]() https://link.zhihu.com/?target=https%3A//petercorke.com/toolboxes/robotics-toolbox/
https://link.zhihu.com/?target=https%3A//petercorke.com/toolboxes/robotics-toolbox/
打开官方网站,选择RTB10.4.mltbx,进行下载
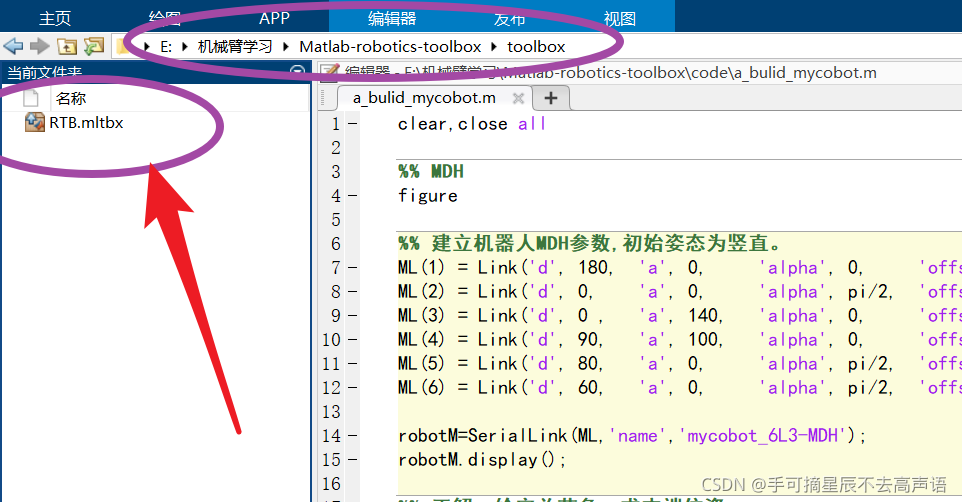
将下载好的RTB10.4.mltbx移动到matlab的工作文件夹下。打开matlab,在matlab浏览器找到安装包,双击打开。选择合适的文件夹进行安装。
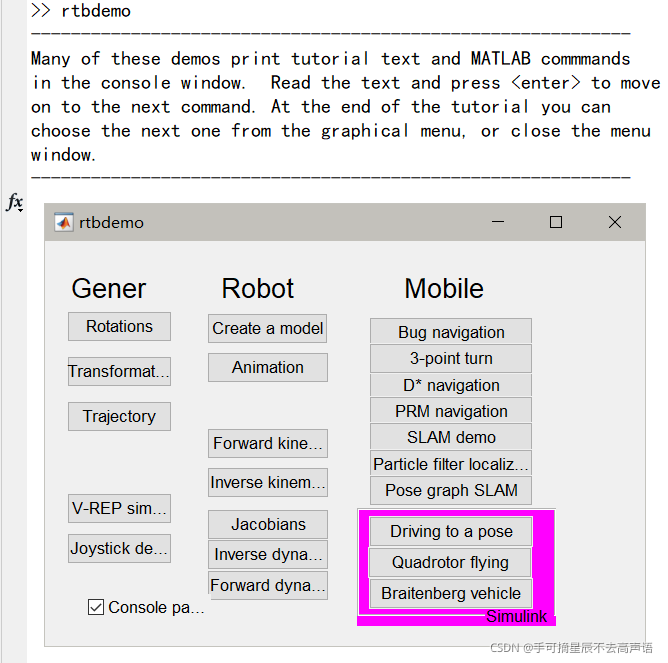
在matlab命令窗口,执行命令。
>> rtbdemo出现如下界面即表示安装成功!
二、改进DH法对myCobot进行仿真
还记得完整的DH法参数吗?

具体的matlab代码如下:
clear,close all
%% MDH
figure
%% 建立机器人MDH参数,初始姿态为竖直。
ML(1) = Link('d', 180, 'a', 0, 'alpha', 0, 'offset',0, 'modified');
ML(2) = Link('d', 0, 'a', 0, 'alpha', pi/2, 'offset',pi/2, 'modified');
ML(3) = Link('d', 0 , 'a', 140, 'alpha', 0, 'offset',0, 'modified');
ML(4) = Link('d', 90, 'a', 100, 'alpha', 0, 'offset',pi/2, 'modified');
ML(5) = Link('d', 80, 'a', 0, 'alpha', pi/2, 'offset',-pi/2, 'modified');
ML(6) = Link('d', 60, 'a', 0, 'alpha', pi/2, 'offset',0, 'modified');
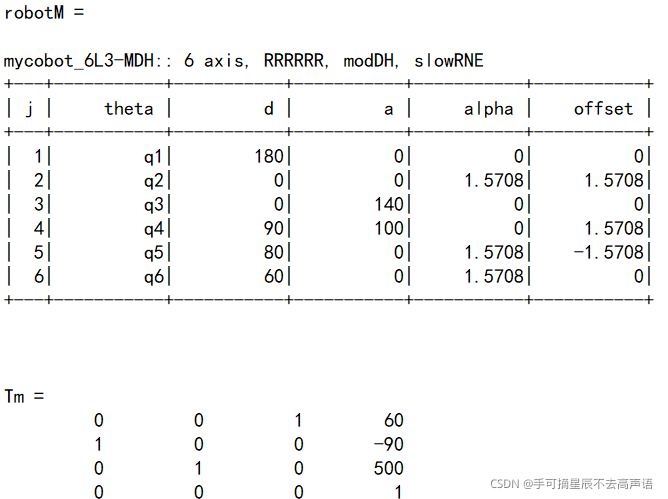
robotM=SerialLink(ML,'name','mycobot_6L3-MDH');
robotM.display();
%% 正解,给定关节角,求末端位姿
thetam=[0,0,0,0,0,0];
%thetam=[0,pi/2,0,pi/2,-1*pi/2,0];
Tm =robotM.fkine(thetam)
robotM.plot(thetam,'tilesize',200);
robotM.teach运行如下:
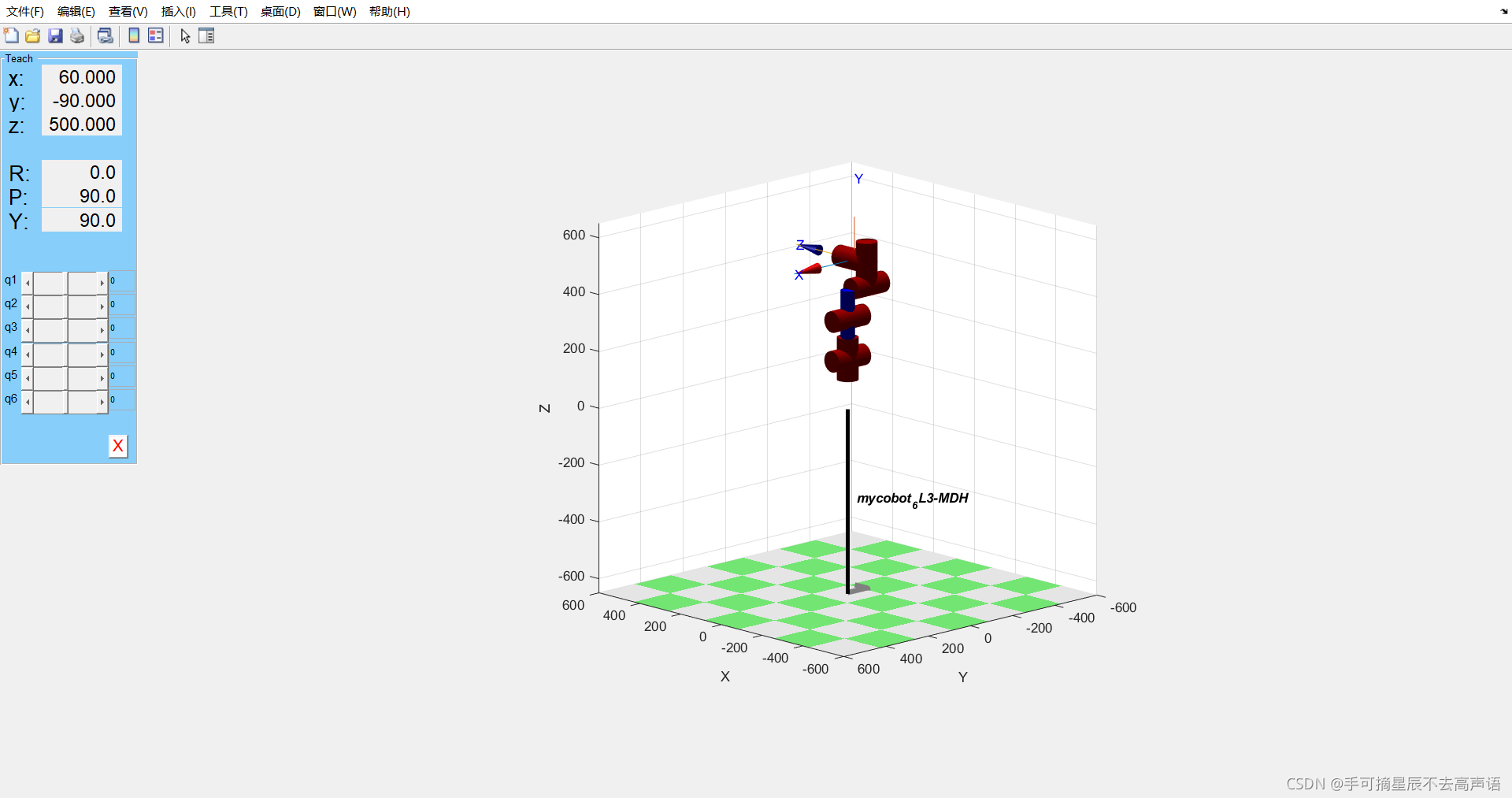
可见,仿真的模型和结果都是正确的!<(^-^)>
















 7万+
7万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









