







预备知识
讨论的对象是二值图像中白色像素的集合,每一个元素是像素的坐标
- 空集:任何空集都只是同一个集合,记作 Φ \Phi Φ
- 子集、并集、交集、补集、集合的差
- 集合
B
B
B的反射表示为
B
^
\hat{B}
B^,集合的映像,也就是集合中的每一个元素
(
x
,
y
)
(x,y)
(x,y)被
(
−
x
,
−
y
)
(-x,-y)
(−x,−y)替代,也就是旋转180度
B ^ = { w ∣ w = − b , b ∈ B } \hat{B} = \{w|w=-b,b\in B\} B^={w∣w=−b,b∈B} - 集合的平移表示为 ( B ) z (B)_z (B)z,也就是每一个点 ( x , y ) (x,y) (x,y)替换为 ( x + z 1 , y + z 2 ) (x+z_1,y+z_2) (x+z1,y+z2)
- SE结构元:一个处理的模板,用来探测图像的一个小的集合或者子图像
腐蚀和膨胀
腐蚀
B
B
B对
A
A
A的腐蚀表示为:
A
⊖
B
=
{
z
∣
(
B
)
z
⊆
A
}
A\ominus B = \{z|(B)_z\subseteq A\}
A⊖B={z∣(B)z⊆A}
也就是一个用
z
z
z平移的
B
B
B,使得
B
B
B包含在
A
A
A中的
z
z
z的集合,假定
B
B
B是一个结构元,因为
B
B
B包含在
A
A
A中等价于
B
B
B不和背景共享任何公共元素,所以也可以表示为:
A
⊖
B
=
{
z
∣
(
B
)
z
∩
A
c
=
∅
}
A\ominus B = \{z|(B)_z\cap A^c = \emptyset\}
A⊖B={z∣(B)z∩Ac=∅}
腐蚀操作可以看做是形态学滤波操作,这种操作将小于结构元的图像细节从图像中滤除,主要过程是用结构元素0、1构成的模板与图像做卷积,结果等于模板和的值的点就是腐蚀的结果
用
3
×
3
3\times 3
3×3的结构元的时候,物体的边界沿周边减少一个像素,可以消除掉图像中小于结构元大小的目标物体,平滑物体边界,如果物体之间有细小的连通,选择适当的结构元可以将物体分开,断开狭长的连接,去除细长的突出物,不同的结构元及其不同的原点产生不同的结果
膨胀
B
B
B对
A
A
A的膨胀定义为:
A
⊕
B
=
{
z
∣
(
B
^
)
z
∩
A
≠
∅
}
A\oplus B = \{z|(\hat{B})z \cap A \neq \emptyset\}
A⊕B={z∣(B^)z∩A=∅}
也就是使得
B
^
\hat B
B^的平移和
A
A
A至少有一个交集的
z
z
z的集合,上式可以等价为:
A
⊕
B
=
{
z
∣
[
(
B
^
)
z
∩
A
]
⊆
A
}
A\oplus B = \{z|[(\hat B)_z \cap A] \subseteq A\}
A⊕B={z∣[(B^)z∩A]⊆A}
上式和卷积操作类似,但是需要注意的是膨胀是一个非线性操作,因为是以集合操作为基础的,但是卷积操作是一个线性操作,主要过程是用结构元素0、1构成的模板与图像做卷积,所有大于0的地方就是膨胀结果
膨胀的作用是当使用
3
×
3
3\times3
3×3的结构元的时候,在物体的边界沿周边增加一个像素、将目标周围的背景点合并到目标中,平滑物体边界,将不同的目标连通到一起,填补分割后物体的孔洞
对偶性
腐蚀和膨胀运算对于求补运算和反射运算是对偶的:
(
A
⊖
B
)
c
=
A
c
⊕
B
^
(
A
⊕
B
)
c
=
A
c
⊖
B
^
(A\ominus B)^c = A^c\oplus \hat B \\ (A \oplus B)^c = A^c \ominus \hat B
(A⊖B)c=Ac⊕B^(A⊕B)c=Ac⊖B^
上述性质对于
B
B
B是对称的时候非常有效,此时先求补再膨胀等价于先腐蚀再求补
开运算和闭运算
之前的腐蚀和膨胀操作存在改变图像大小的问题,但是开操作和闭操作则不会,开操作和闭操作都会平滑物体的轮廓,但是开操作会断开窄桥,消除细的突出物,但是闭操作会消除小空洞连接窄桥
先开运算后闭运算构成噪声滤波器,首先开运算消除背景噪声但是图片产生间断,之后开运算消除噪声斑点,连接间断
- 开操作:先腐蚀后膨胀
A ∘ B = ( A ⊖ B ) ⊕ B A\circ B = (A\ominus B)\oplus B A∘B=(A⊖B)⊕B
满足如下性质:
A ∘ B A\circ B A∘B是 A A A的一个子集,如果 C C C是 D D D的一个子集,那么 C ∘ B C\circ B C∘B是 D ∘ B D\circ B D∘B的一个子集, ( A ∘ B ) ∘ B = A ∘ B (A\circ B)\circ B = A\circ B (A∘B)∘B=A∘B - 闭操作:先膨胀再腐蚀
A ⋅ B = ( A ⊕ B ) ⊖ B A\cdot B = (A\oplus B)\ominus B A⋅B=(A⊕B)⊖B
满足如下性质
A A A是 A ⋅ B A\cdot B A⋅B的一个子集,如果 C C C是 D D D的一个子集,那么 C ⋅ B C\cdot B C⋅B是 D ⋅ B D\cdot B D⋅B的一个子集, ( A ⋅ B ) ⋅ B = A ⋅ B (A\cdot B)\cdot B = A\cdot B (A⋅B)⋅B=A⋅B - 对偶性:
( A ⋅ B ) c = ( A c ∘ B ^ ) ( A ∘ B ) c = ( A c ⋅ B ^ ) (A\cdot B)^c = (A^c\circ \hat B) \\ (A\circ B)^c = (A^c\cdot \hat B) (A⋅B)c=(Ac∘B^)(A∘B)c=(Ac⋅B^)
击中或击不中变换
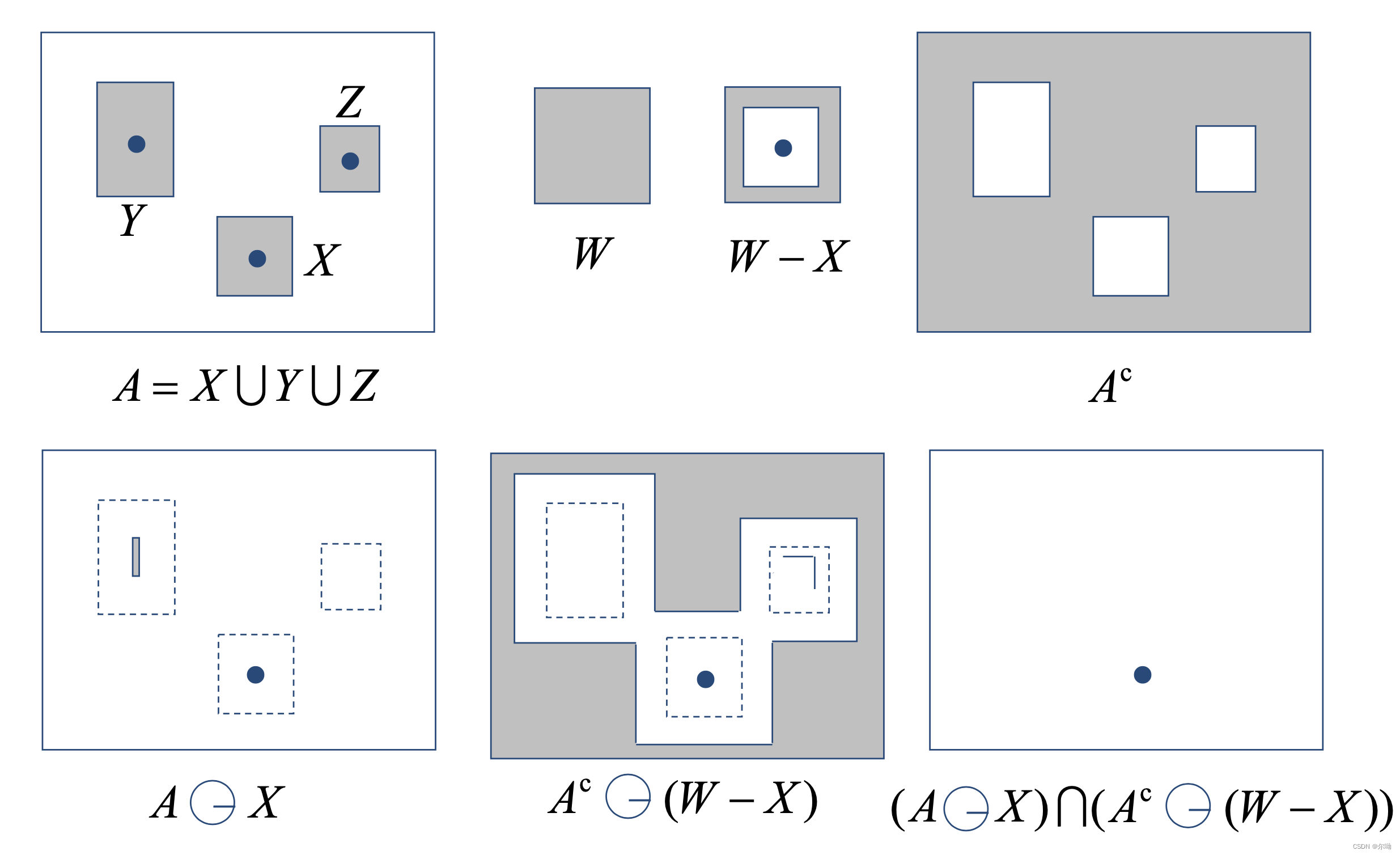
如上图所示,集合
A
A
A由
X
,
Y
,
Z
X,Y,Z
X,Y,Z三个子集构成,现在的目的是找到
X
X
X的位置,方法就是击中操作,令
B
=
(
B
1
,
B
2
)
,
B
1
=
X
,
B
2
=
(
W
−
X
)
B = (B_1,B_2),B_1 = X,B_2 = (W - X)
B=(B1,B2),B1=X,B2=(W−X),最后得到
X
X
X的位置的集合操作公式就是:
A
o
∗
B
=
(
A
⊖
X
)
∩
[
A
c
⊖
(
W
−
X
)
]
A\ o* B = (A\ominus X)\cap [A^c \ominus (W - X)]
A o∗B=(A⊖X)∩[Ac⊖(W−X)]
根据对偶性,可以将上式写为:
A
o
∗
B
=
(
A
⊖
B
1
)
∩
(
A
⊕
B
^
2
)
A\ o* B = (A\ominus B_1)\cap(A\oplus \hat B_2)
A o∗B=(A⊖B1)∩(A⊕B^2)
上面两个式子就称为形态学击中或击不中变换,上面的式子基于一个假设,也就是当物体之间是断开的,且物体至少被一个像素宽的背景围绕,物体才可分
一些基本的形态学算法
边界提取
先腐蚀然后减去得到的就是边界
β
(
A
)
=
A
−
(
A
⊖
B
)
\beta(A) = A - (A\ominus B)
β(A)=A−(A⊖B)
区域填充
X k = ( X k − 1 ⊕ B ) ⋂ A c , k = 1 , 2 , 3 X_k = (X_{k - 1} \oplus B)\bigcap A^c,k = 1,2,3 Xk=(Xk−1⊕B)⋂Ac,k=1,2,3,当 X k = X k − 1 X_k = X_{k - 1} Xk=Xk−1的时候迭代终止, X 0 X_0 X0是要填充的区域的内部的任意一点
连通分量提取
X k = ( X k − 1 ⊕ B ) ⋂ A , k = 1 , 2 , 3 , ⋯ X_k = (X_{k - 1} \oplus B)\bigcap A,k = 1,2,3,\cdots Xk=(Xk−1⊕B)⋂A,k=1,2,3,⋯,当 X k = X k − 1 X_k = X_{k - 1} Xk=Xk−1的时候迭代终止, X 0 X_0 X0是物体内部的任意一点
孔洞填充
一个孔洞被定义为由前景像素相连接的边界所包围的一个背景区域:
X
k
=
(
X
k
−
1
⊕
B
)
∩
A
c
,
k
=
1
,
2
,
3
⋯
X_k = (X_{k - 1}\oplus B)\cap A^c,k = 1,2,3\cdots
Xk=(Xk−1⊕B)∩Ac,k=1,2,3⋯
当
X
k
=
X
k
−
1
X_k = X_{k - 1}
Xk=Xk−1的时候算法迭代停止,
A
A
A表示的是一个集合,元素是包含一个孔洞的边界,集合
X
k
X_k
Xk包含所有被填充的孔洞,
X
0
X_0
X0表示的是初始的孔洞集合的原点位置
凸壳
如果在集合
A
A
A内连接任意两个点的直线段都在
A
A
A的内部,就称集合
A
A
A是凸形的,任意集合
S
S
S的凸壳
H
H
H是包含
S
S
S的最小凸集,集合差
H
−
S
H - S
H−S称为
S
S
S的凸块,求解凸壳过程如下:
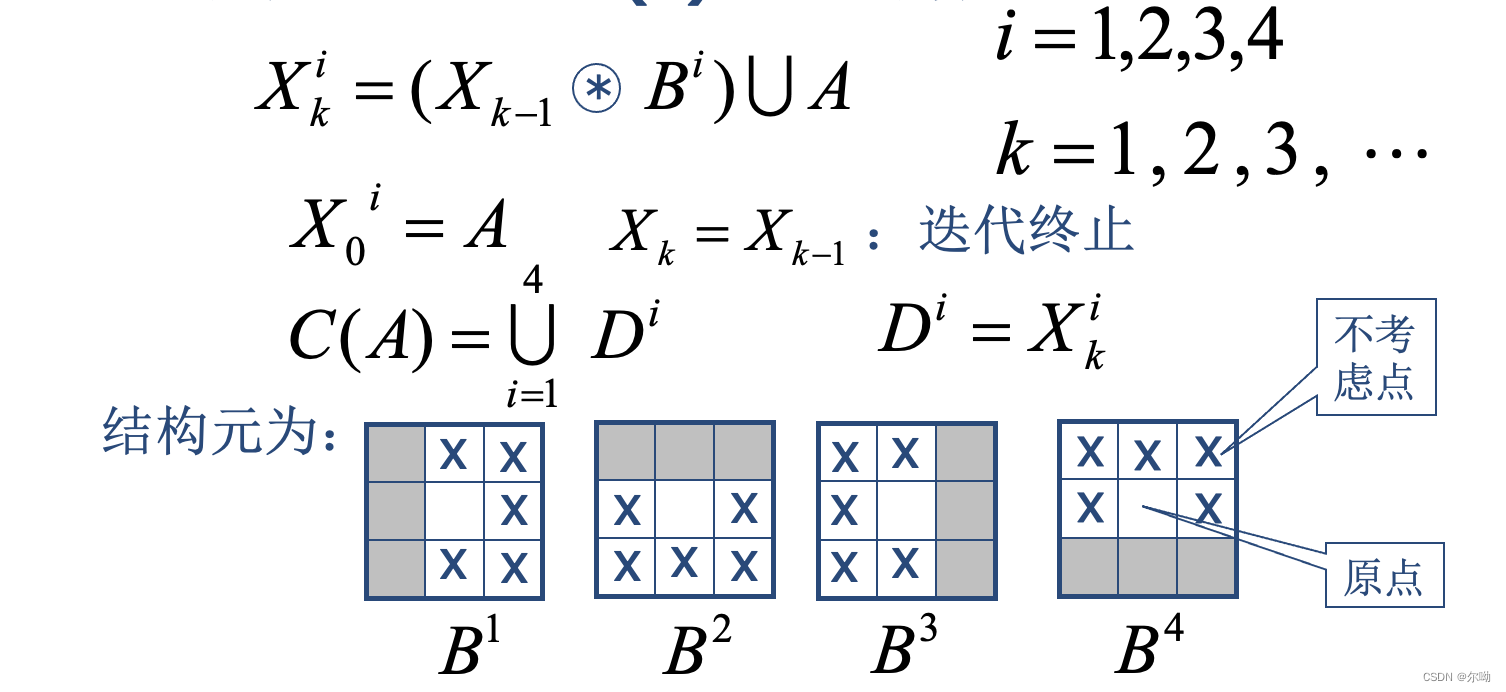
首先反复对
B
1
B^1
B1进行击中或击不中变换直到没有变化然后与
A
A
A求并得到一个集合,这个过程同样对
B
i
B^i
Bi重复(应用于
A
A
A)于是得到4个集合,得到的四个集合求并即为
A
A
A的凸壳。
细化
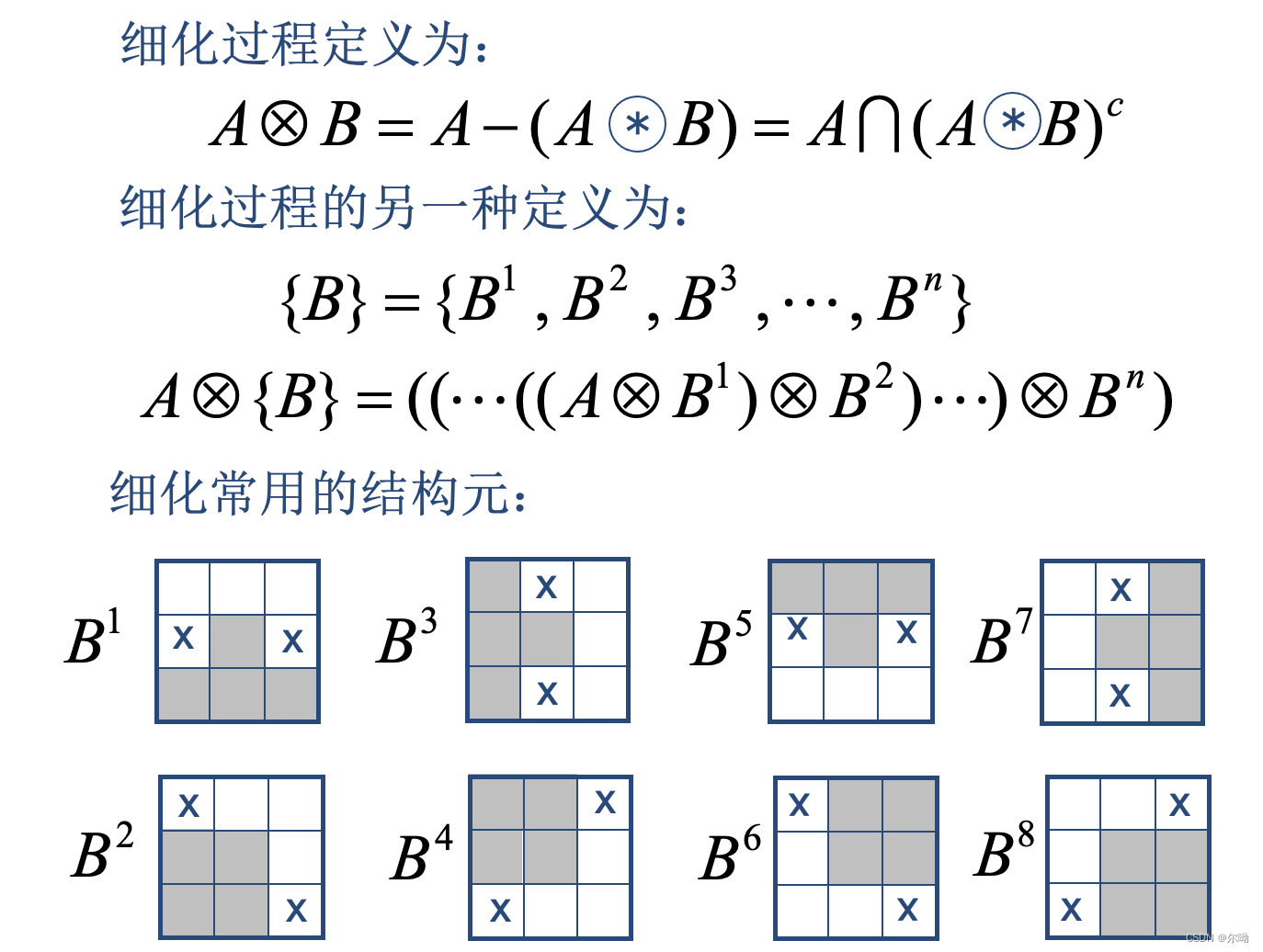
粗化
粗化和细化是形态学上的对偶过程,为了将集合粗化,先求集合的补,通过对集合补的细化后,对细化结果求补,最后消除间断即获得集合的粗化

骨架
集合
A
A
A的骨架表示为
S
(
A
)
S(A)
S(A),可以通过下式计算:
S
(
A
)
=
⋃
k
=
0
K
S
k
(
A
)
S
k
(
A
)
=
(
A
⊖
k
B
)
−
(
A
⊖
k
B
)
∘
B
S(A) = \bigcup_{k = 0}^KS_k(A) \\ S_k(A) = (A\ominus kB) - (A\ominus kB)\circ B
S(A)=k=0⋃KSk(A)Sk(A)=(A⊖kB)−(A⊖kB)∘B
其中
B
B
B表示一个结构元,
(
A
⊖
k
B
)
(A\ominus kB)
(A⊖kB)表示对
A
A
A进行连续
k
k
k次腐蚀,
K
K
K是
A
A
A被腐蚀为空集之前的最后一次腐蚀:
K
=
m
a
x
{
k
∣
(
A
⊖
k
B
)
≠
∅
}
K = max\{k|(A\ominus kB)\neq \emptyset\}
K=max{k∣(A⊖kB)=∅}
实现1-细化
在不破坏连通性的背景下细化图像
- 做腐蚀操作但是不立即删除像素,只打标记
- 将不破坏连通性的标记点删除
- 重复执行,将产生细化结果
实现2-距离变换图算法
距离变换图算法把二值图像变换为灰度图像,其中每个像素的灰度值等于0到他最近的1的距离
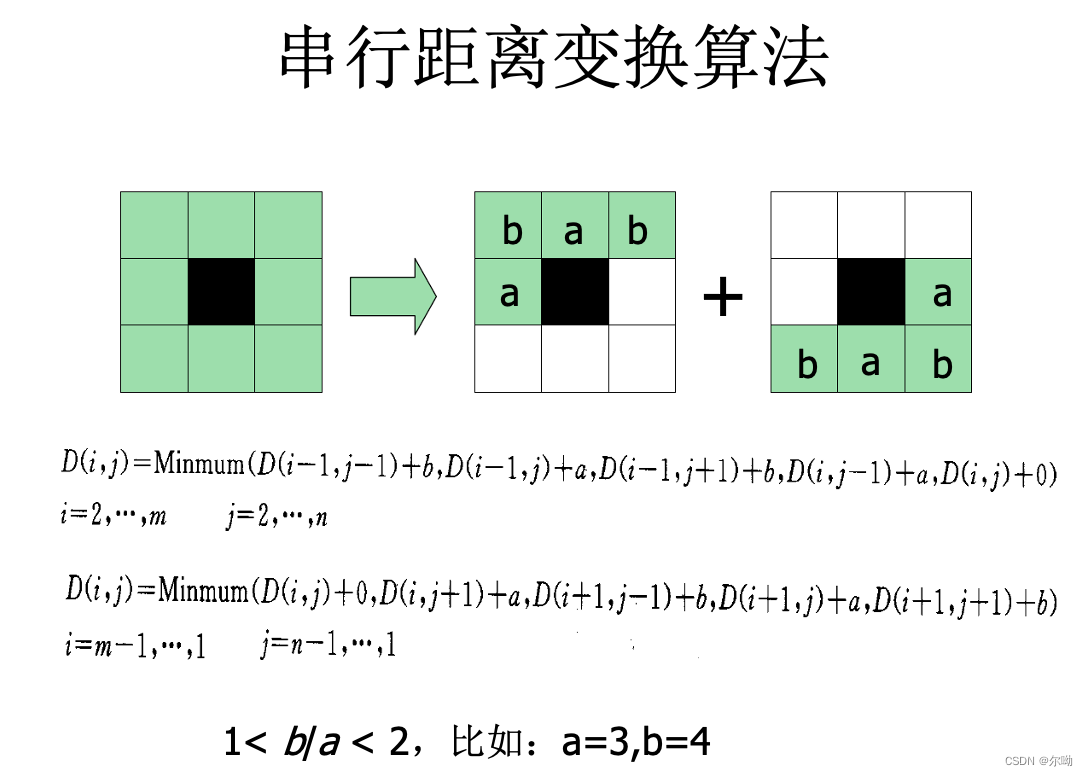
算法流程:
- 求取二值图像的边界
- 对边界二值图像求取距离变换
- 求距离变换图中的局部极大值
- 落入原二值图像中的局部极大值就是图像的骨架
裁剪
对细化和骨架绘制算法的补充,清除这些算法产生的一些不必要的附加成分
- 用一系列被设计用来检测终点的结构元素对A进行细化得到结果 X 1 X_1 X1
- 得到 X 1 X_1 X1的终点集合 X 2 X_2 X2
- 对端点 X 2 X_2 X2进行三次膨胀处理,结果和原图求交 X 3 X_3 X3
- 最终结果是 X 3 ⋃ X 1 X_3\bigcup X_1 X3⋃X1
灰度级图像的形态学
膨胀
(
f
⊕
b
)
=
m
a
x
{
f
(
s
−
x
,
t
−
y
)
+
b
(
x
,
y
)
∣
(
s
−
x
)
,
(
t
−
y
)
∈
D
f
,
(
x
,
y
)
∈
D
b
}
(f\oplus b) = max\{f(s-x,t-y)+b(x,y)|(s - x),(t - y)\in D_f,(x,y)\in D_b\}
(f⊕b)=max{f(s−x,t−y)+b(x,y)∣(s−x),(t−y)∈Df,(x,y)∈Db}
膨胀图像明亮且暗小的细节减弱或消除
腐蚀
(
f
⊖
b
)
=
m
i
n
{
f
(
s
+
x
,
t
+
y
)
−
b
(
x
,
y
)
∣
(
s
+
x
)
,
(
t
+
y
)
∈
D
f
,
(
x
,
y
)
∈
D
b
}
(f\ominus b) = min\{f(s+x,t+y)-b(x,y)|(s + x),(t + y)\in D_f,(x,y)\in D_b\}
(f⊖b)=min{f(s+x,t+y)−b(x,y)∣(s+x),(t+y)∈Df,(x,y)∈Db}
腐蚀图像变暗且尺寸小的明亮细节减弱或消除
开运算和闭运算
开运算:先腐蚀后膨胀,小的明亮的细节变小,而暗的细节没有明显变化
闭运算:先膨胀后腐蚀,小的暗的细节变小,但明亮部分没有明显变化
应用
形态学图像平滑
先开运算后闭运算,减少或除去人为明和暗的因素和噪声
形态学图像梯度
膨胀减去腐蚀图像
g
=
(
f
⊕
b
)
−
(
f
⊖
b
)
g = (f\oplus b)-(f\ominus b)
g=(f⊕b)−(f⊖b)
高帽变换
原图减去开运算结果,增强阴影的细节














 481
481











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









