






文章目录
概述
机器人操作的定义是通过某种机构使零件和工具在空间运动。需要对机器人各个部分的位置和姿态进行描述,用坐标系来实现对位置和姿态的描述。
1 位置和姿态以及坐标系
一个物体在空间中的位姿和姿态可以通过坐标系来描述。
1.1 描述位置
建立一个坐标系,就可以对空间中任意一个点用坐标来描述,物体的位置同样也以坐标系里的坐标来描述。
1.2 描述姿态
物体的姿态是多变的,要描述姿态就要先确定一个参照物。
1.2.1 用矩阵描述姿态
B坐标系相对A坐标系的旋转矩阵

矩阵里的元素含义为A坐标系和B坐标系轴的单位矢量点乘。
分析
旋转矩阵描述了B坐标系三轴的单位矢量在A坐标系上的位置,下面用XB、YB、ZB分别表示B坐标系三个轴的单位矢量。
第一列XB·XA表示XB矢量在A坐标系的X轴上的投影,即x坐标,XB·YA表示在Y轴的投影,即y坐标,以此类推。
原点重合时,映射公式:
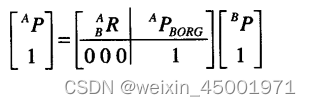
原点不重合时,映射公式:

思路,取一个A坐标系平移到B坐标系原点的中间坐标系,用RP公式转换,然后再将矢量平移过去A。
整理后得到
即用一个矩阵表示旋转+平移的关系。
例如,坐标轴B由坐标系A绕Z轴旋转30°,并且位移到A坐标系的(10,5.0,0.0)处而成。

注:旋转平移矩阵应右乘矢量,即以矩阵的行乘矢量的列。
平移+旋转的关系用齐次变换矩阵表示。
2 算子
用于坐标系间点的额映射的通用数学表达式成为算子。
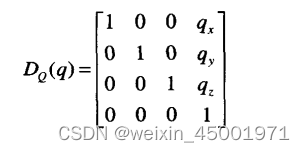
2.1 平移算子
2.2 旋转算子
绕Z轴旋转算子

2.3 变换算子(旋转+平移)
齐次变换矩阵
2.4 总结
齐次变换矩阵的定义:
1、它是坐标系的描述。确定了坐标系B相对坐标系A的位置和姿态。
2、它是变换映射。
3、它是变换算子。可以由矢量在一个坐标系的描述得到它在另一个坐标系的描述。
3 应用
3.1 混合变换
现有三个坐标系A、B、C,已知C相对于B,B相对于A的变换矩阵,用CP求AP。
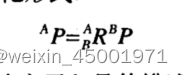
先用

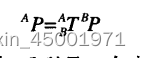
求出CP在B的描述BP,再用

求出BP在A的描述。
整合得到。

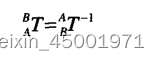
3.2 逆变换
现有坐标系A和B,已知B相对于A的变换矩阵,求A相对于B的变换矩阵。
直接用逆矩阵。
4 变换方程
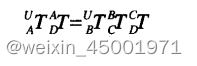
变换方程就是用一组闭环的坐标系来联立方程,例如:

D相对于U的变换矩阵可由U->A->D以及U->B->C->D这两个变换路径来表示,用这两个关系来建立方程式就得到了变换方程。
5 位姿表示方式
5.1 欧拉角
欧拉角通过物体绕坐标系XYZ轴旋转的角度来表示物体的位姿。因为绕XYZ轴旋转得出的位姿与顺序有关,旋转顺序不可逆,所以欧拉角根据XYZ的顺序也分为很多种。
5.1.1 ZYX欧拉角
先绕Z轴旋转,再绕Y轴旋转,最后绕X轴旋转。
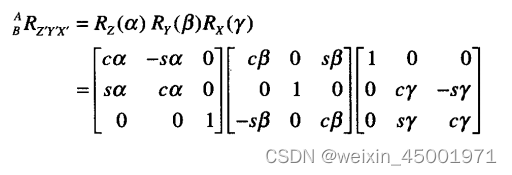
通过每个轴的旋转矩阵得出位姿的旋转矩阵。
5.1.2 ZYZ欧拉角
先绕Z轴旋转,再绕Y轴旋转,最后绕X轴旋转。
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









