






1. 系统开始的地方:
// VioManager构造中开始搞事情
sys = std::make_shared<VioManager>(params);
uniformly: 均匀地
2. 使用imu数据进行初始化的核心部分
受这篇文章的启发(我是一个链接,可以点),所以我对其里面的核心部分进行展开。
2.1 为什么通过imu测得的加速度可以获得imu z轴在世界坐标系下的向量表示
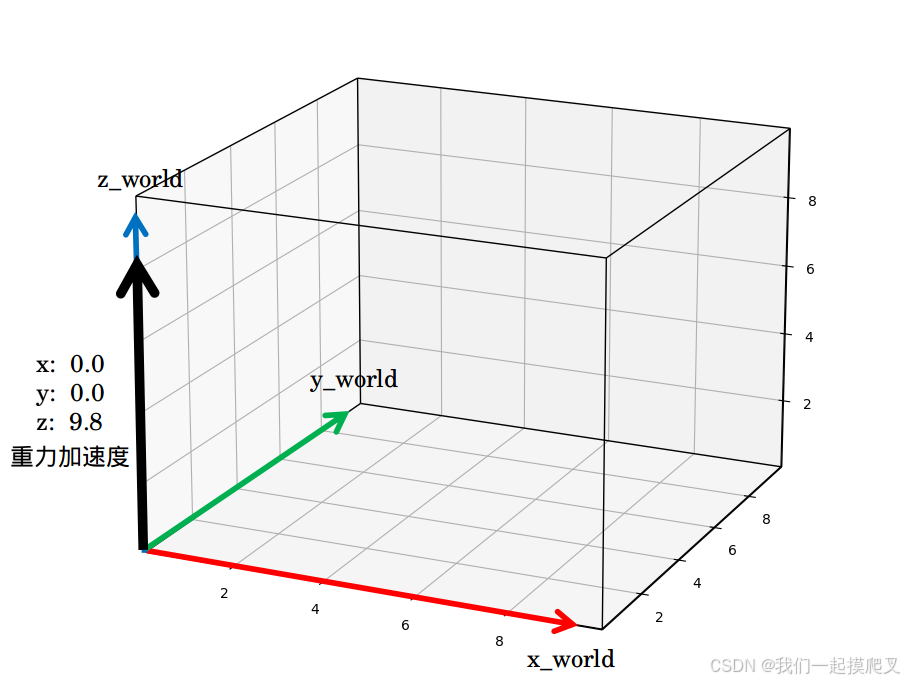
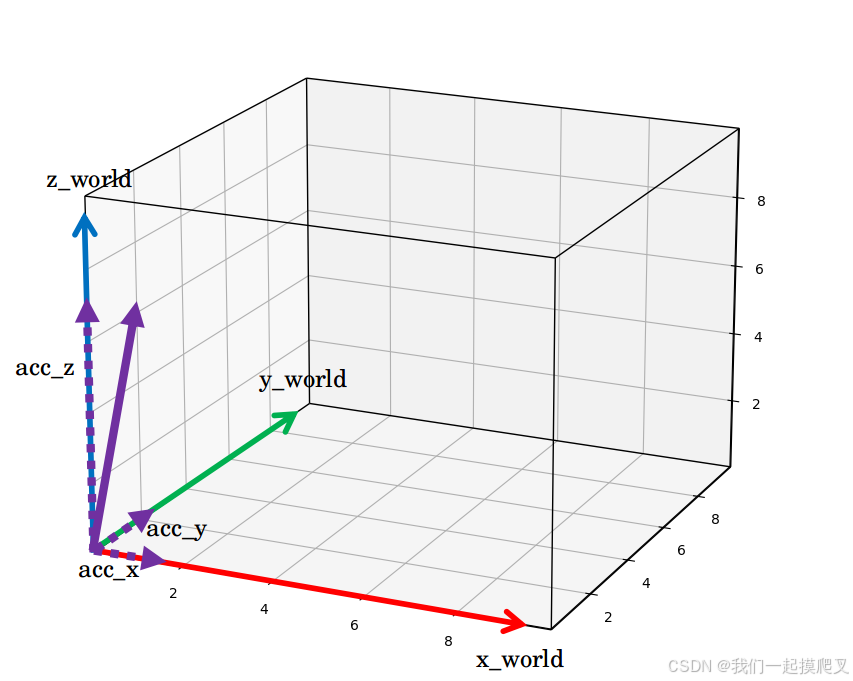
imu测得的原始加速度值(也就是上图中的三个分量):
a
c
c
=
[
a
c
c
x
a
c
c
y
a
c
c
z
]
acc=\begin{bmatrix} acc_x \\ acc_y \\ acc_z \\ \end{bmatrix}
acc=
accxaccyaccz
这也是世界坐标系的z轴方向在imu坐标系上的投影。
既然产生了投影分量,就说明imu的3个轴和世界坐标系的3个轴不是重合的。
你想想,如果重合的话,imu测得的值就该是[0.0, 0.0, 9.8]了(如果没bias)。
也就是说,此时imu在世界系下出现了一定的旋转(比如车辆有侧倾或俯仰)。
所以,我们就来求一下世界系和imu系之间的这个旋转矩阵:
R
=
[
x
y
z
]
R=\begin{bmatrix} x&y&z \end{bmatrix}
R=[xyz]
注:这里的
x
x
x
y
y
y
z
z
z必须是单位向量,这样才能组成旋转矩阵(正交阵)。
先求z:
有了imu测得的加速度,把加速度向量单位化一下就得到了imu z轴的单位方向向量。对应的代码如下。
// StaticInitializer.cpp
Eigen::Vector3d z_axis = a_avg_2to1 / a_avg_2to1.norm();
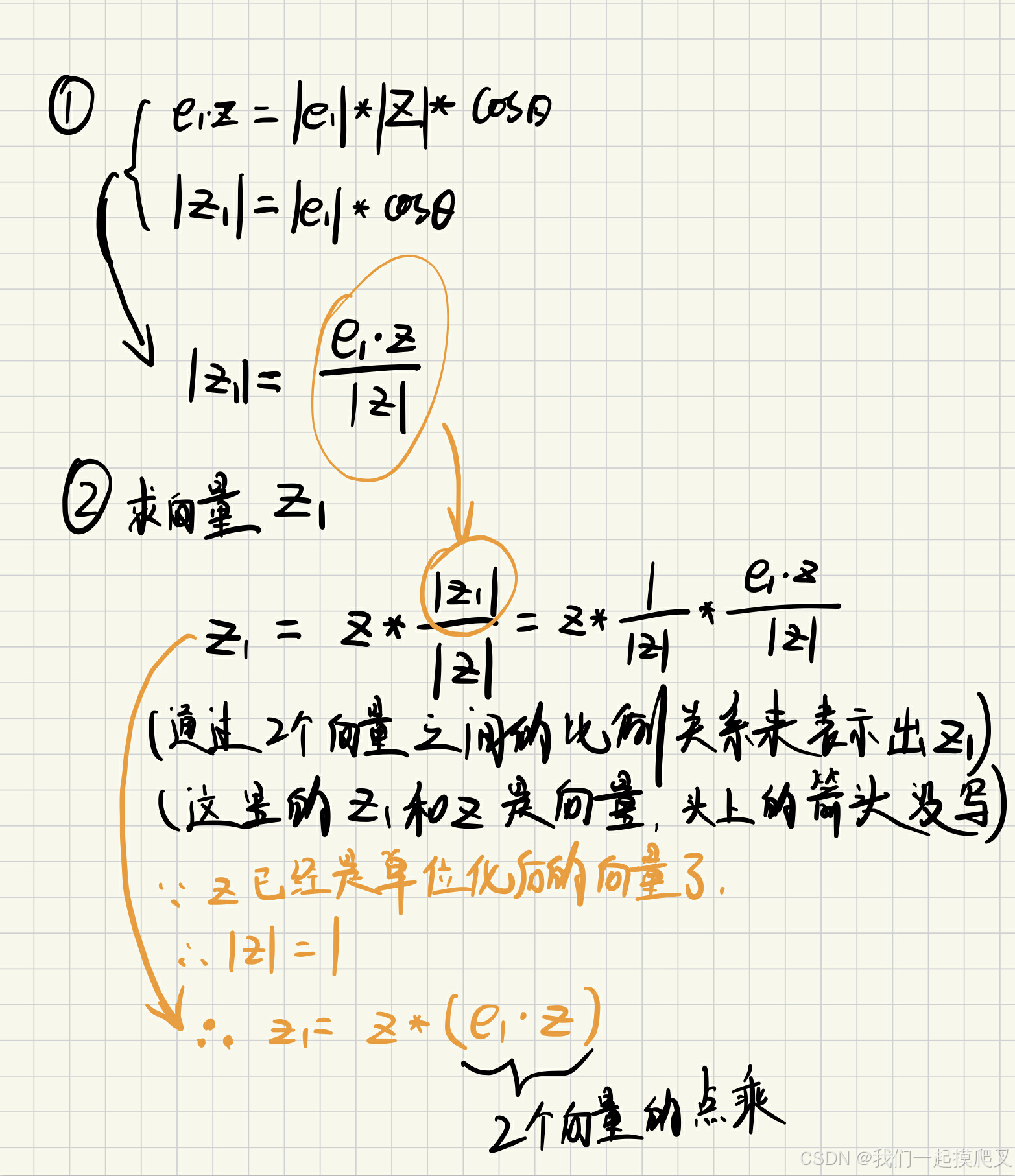
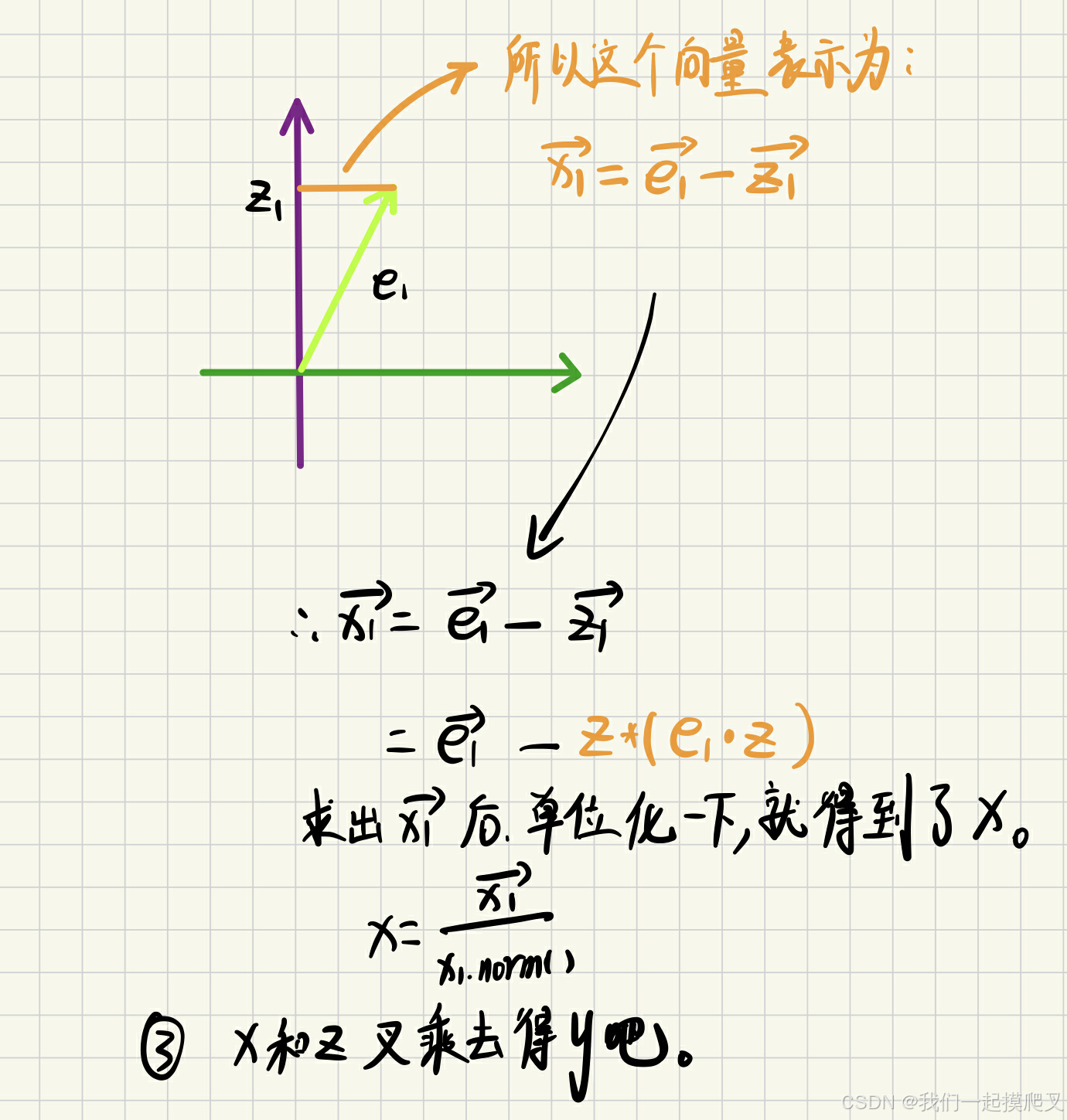
再求x:
这里就需要用到施密特正交化的知识,其实本质就是:已知了一个向量1,现在又有另一个向量2(2不能和1平行,可与1垂直或不垂直)。因为在咱们这里, z z z已经得出来了, x x x可以任意给一个,只要不和 z z z平行就行,然后利用施密特正交化求出与 z z z垂直的 x x x的分量,再使用叉乘方式求出 y y y即可。
接下来过一遍代码中的推导过程(相当于过了一遍施密特正交化的推导过程),先看看源码长什么样:
static void gram_schmidt(const Eigen::Vector3d &gravity_inI, Eigen::Matrix3d &R_GtoI) {
// This will find an orthogonal vector to gravity which is our local z-axis
// We need to ensure we normalize after each one such that we obtain unit vectors
Eigen::Vector3d z_axis = gravity_inI / gravity_inI.norm();
Eigen::Vector3d x_axis, y_axis;
Eigen::Vector3d e_1(1.0, 0.0, 0.0);
Eigen::Vector3d e_2(0.0, 1.0, 0.0);
double inner1 = e_1.dot(z_axis) / z_axis.norm();
double inner2 = e_2.dot(z_axis) / z_axis.norm();
if (fabs(inner1) < fabs(inner2)) {
x_axis = z_axis.cross(e_1);
x_axis = x_axis / x_axis.norm();
y_axis = z_axis.cross(x_axis);
y_axis = y_axis / y_axis.norm();
} else {
x_axis = z_axis.cross(e_2);
x_axis = x_axis / x_axis.norm();
y_axis = z_axis.cross(x_axis);
y_axis = y_axis / y_axis.norm();
}
// Original method
// https://en.wikipedia.org/wiki/Gram%E2%80%93Schmidt_process
// x_axis = e_1 - z_axis * z_axis.transpose() * e_1;
// x_axis = x_axis / x_axis.norm();
// y_axis = ov_core::skew_x(z_axis) * x_axis;
// y_axis = y_axis / y_axis.norm();
// Rotation from our global (where gravity is only along the z-axis) to the local one
R_GtoI.block(0, 0, 3, 1) = x_axis;
R_GtoI.block(0, 1, 3, 1) = y_axis;
R_GtoI.block(0, 2, 3, 1) = z_axis;
}
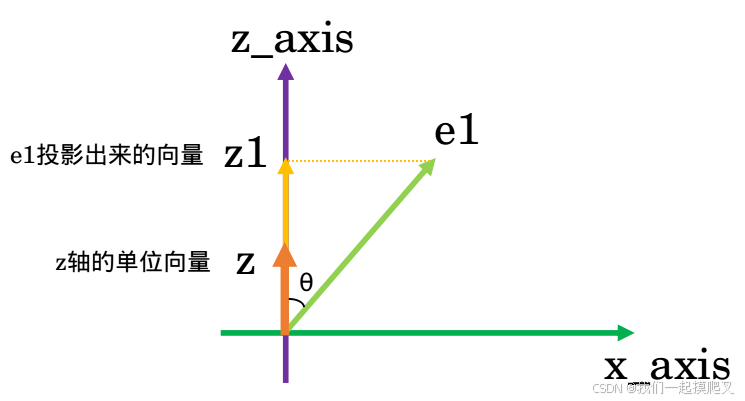
即将要推导的是上面代码中的 O r i g i n a l m e t h o d Original\ method Original method部分,不清楚作者为啥把这个方法屏蔽了,采用了上面的新方法,所以目前先推导自己理解的老方法(新方法还没看懂,懂者欢迎交流),目前看老方法也挺好用。
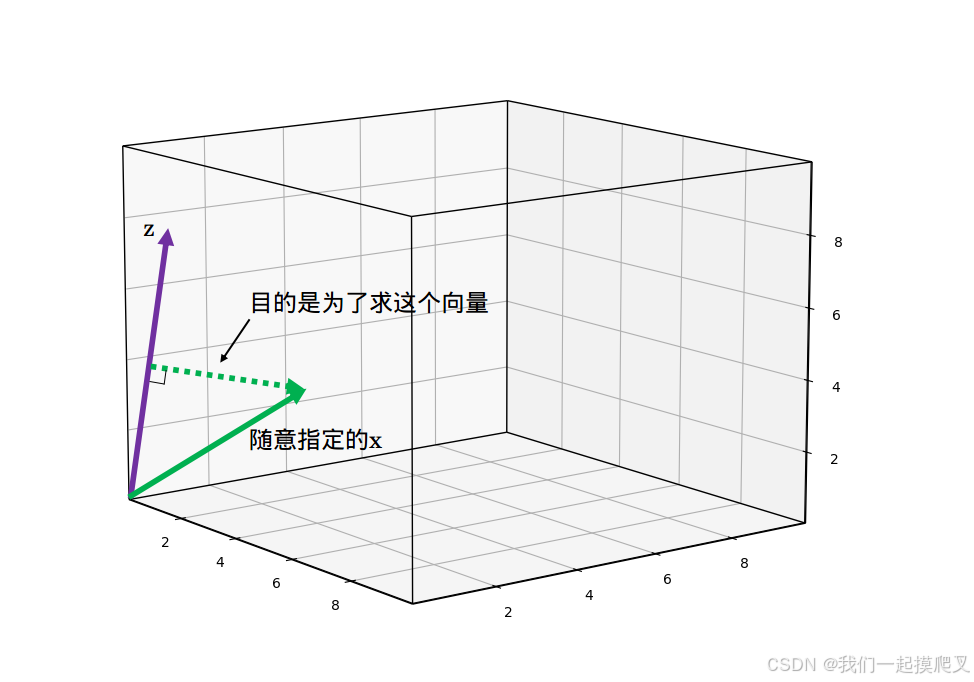
为了方便求解与z垂直的向量,把上面的向量暂时放到二维坐标系中,这样看着更直观一些。随意指定的
x
x
x并不是我们想要的
x
x
x,所以给它改名字叫做
e
1
e1
e1。
3. 补充
其实可以看出, x x x轴是自己任意指定的,所以每指定一个 x x x就对应一个 R R R,之前也提过,这个 R R R是imu测得的加速度和世界系下的加速度之间的一个旋转矩阵,所以每一个 R R R乘上imu的加速度之后,都应该能把imu本体系下的加速度转为[0.0, 0.0, 9.8],写个python代码验证一下,确实是这样。。
下面是我的python脚本:
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import sys
def main():
# 从命令行读取输入的向量
if len(sys.argv) != 4:
print("Usage: python generate_rotation_matrix.py <e1_x> <e1_y> <e1_z>")
sys.exit(1)
e1 = np.array([float(sys.argv[1]), float(sys.argv[2]), float(sys.argv[3])])
# 1. 定义IMU测得的加速度向量
acceleration = np.array([0.039023521, 0.218466725, 9.799889801])
# 2. 计算加速度向量的范数
acceleration_norm = np.linalg.norm(acceleration)
# 3. 单位化加速度向量得到z轴向量
z_axis = acceleration / acceleration_norm
# 4. 计算x轴向量,使其垂直于z轴
x_axis = e1 - z_axis * np.dot(z_axis, e1)
x_axis = x_axis / np.linalg.norm(x_axis) # 单位化x轴向量
# 5. 计算y轴向量,通过x轴和z轴的叉积得到
y_axis = np.cross(z_axis, x_axis)
# 6. 构造旋转矩阵
rotation_matrix = np.column_stack((x_axis, y_axis, z_axis))
# 7. 计算旋转矩阵的转置
rotation_matrix_T = rotation_matrix.T
# 8. 计算旋转后的加速度向量
rotated_acceleration = rotation_matrix_T @ acceleration
# 打印结果
print("Acceleration Vector:")
print(acceleration)
print("Acceleration Norm:")
print(acceleration_norm)
print("x_axis:", x_axis)
print("y_axis:", y_axis)
print("z_axis:", z_axis)
print("Rotation Matrix:")
print(rotation_matrix)
print("Rotation Matrix Transpose:")
print(rotation_matrix_T)
print("Rotated Acceleration Vector:")
print(rotated_acceleration)
# 绘制向量
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# 绘制坐标轴
ax.quiver(0, 0, 0, x_axis[0], x_axis[1], x_axis[2], color='r', label='x-axis')
ax.quiver(0, 0, 0, y_axis[0], y_axis[1], y_axis[2], color='g', label='y-axis')
ax.quiver(0, 0, 0, z_axis[0], z_axis[1], z_axis[2], color='b', label='z-axis')
# 设置图形的范围
ax.set_xlim([-1, 1])
ax.set_ylim([-1, 1])
ax.set_zlim([-1, 1])
# 设置标签
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
# 添加图例
ax.legend()
# 显示图形
plt.show()
if __name__ == "__main__":
main()
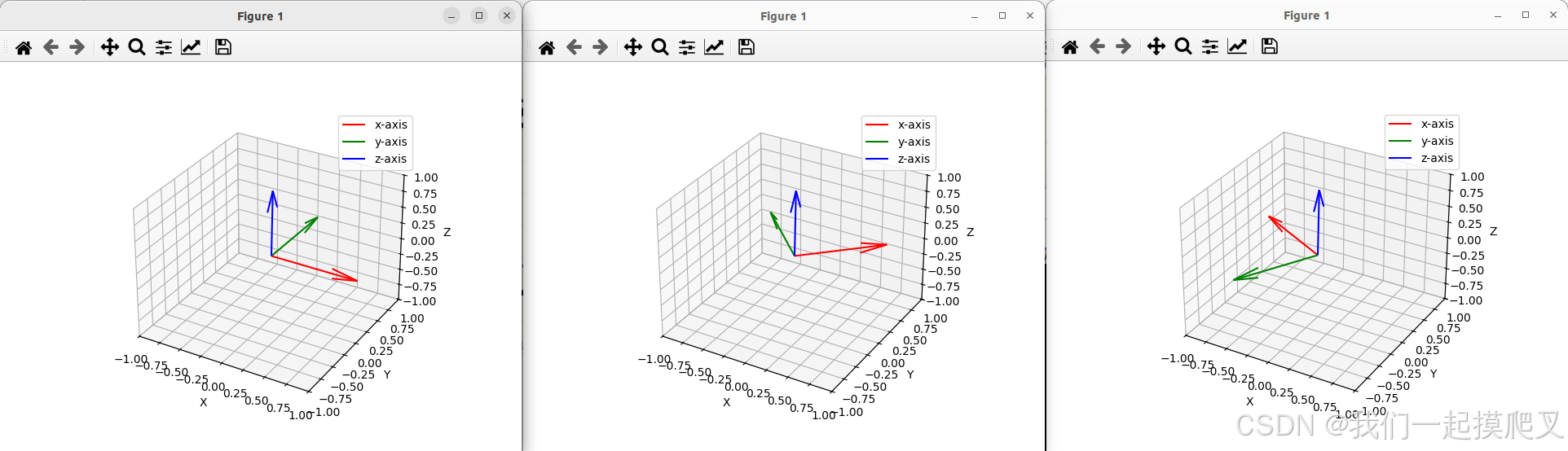
三张图分别对应的运行命令为:
python3 generate_rotation_matrix.py 1.0 0.0 0.0
python3 generate_rotation_matrix.py 1.0 1.0 -0.2
python3 generate_rotation_matrix.py -5.9 3.2 2.4
每个脚本都会有一些输出,取其中一个输出来看下:
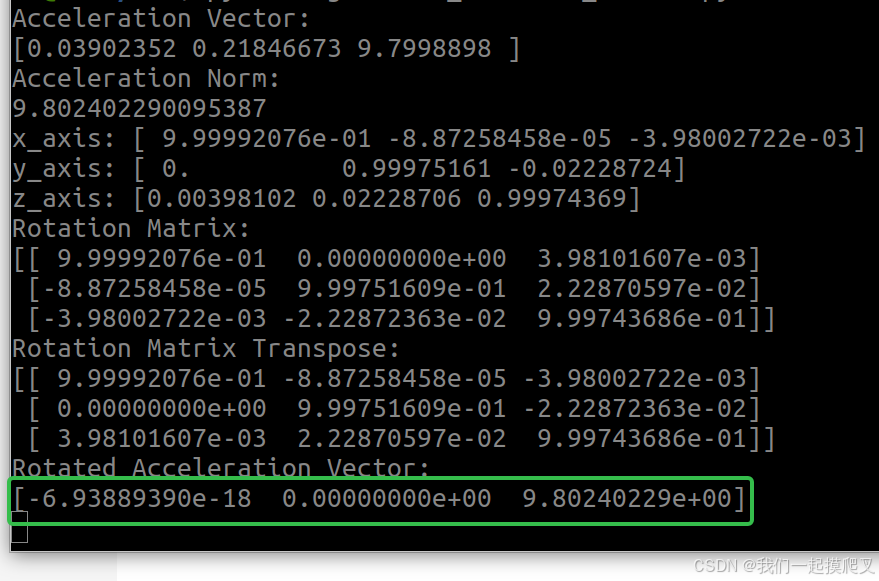
可见,确实把imu测得的加速度转到了世界系下,得到了[0.0, 0.0, 9.8]。
bye~…

















 340
340

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









