







 本文探讨了PLC(可编程逻辑控制器)在继电器控制系统改造中的应用,详细讲解了逻辑代数的基本概念及其在PLC编程中的作用,通过实例展示了如何使用逻辑设计法解决小车往返控制问题。
本文探讨了PLC(可编程逻辑控制器)在继电器控制系统改造中的应用,详细讲解了逻辑代数的基本概念及其在PLC编程中的作用,通过实例展示了如何使用逻辑设计法解决小车往返控制问题。
2021.11.07
——
参考文献
[1]罗庚兴.浅谈用PLC改造继电器控制系统的方法.煤矿机械,2006,27(7):159-161.
[2]清华大学电子学教研组. 数字电子技术基础简明教程[M]. 第三版. 北京:高等教育出版社, 2006.
1逻辑代数
在提到一般教科书都会记载,但实际上较少使用的逻辑设计法之前,有必要先回顾一下贯穿整本数电课本的逻辑代数(Logic
Algebra)这一知识点。
逻辑代数,或称布尔代数(Bool Algebra),是按一定的逻辑关系进行运算的代数,其基本逻辑运算有与(AND)、或(OR)、非(NOT)。
- 与运算: Y = A ⋅ B Y=A·B Y=A⋅B
- 或运算: Y = A + B Y=A+B Y=A+B
- 非运算: Y = A ‾ Y=\overline{A} Y=A
在逻辑代数中,使用英文字母表示变量,称为逻辑变量,其取值为0或1;上式1-3被称为逻辑表达式,式中A、B称为输入逻辑变量,Y称为输出逻辑变量;字母上面无反号的称为原变量,有反号的称为反变量。
当Y=F(A,B,…)时,称Y是A、B、…的逻辑函数。
逻辑函数在各个变量之间存在互相制约关系,则称之为约束,该逻辑函数称为有约束的逻辑函数,这些变量称为一组有约束的变量。
2 PLC的逻辑设计法
2.1电路->逻辑代数
逻辑代数是分析和综合开关电路的重要数学工具,因此又称为开关代数。
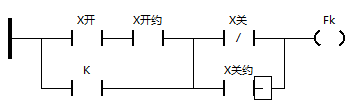
下图所示的三类电路,可用于反应与、或、非三种基本逻辑关系:
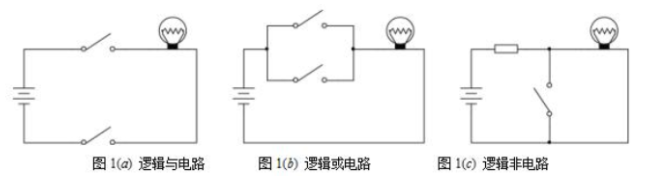
根据继电器电路图推导逻辑函数表达式,遵循原则见下:
- 电器开关的逻辑函数以线圈作为输出逻辑变量,以触点作为输入逻辑变量;
- 线圈得电为 “1”,线圈断电为“0“;
- 常开触点用原变量表示,常闭触点用反变量表示 ;触点动作为“1”,不动作为“0”;
- 时间继电器的线圈与其延时动作触点的逻辑状态不一致 ,并且时间继电器的触点有4种状态(延时断开、延时闭合、瞬动断开、瞬动闭合),需要作特殊处理 。
PLC梯形图(称作继电器梯形图)程序编程原理与开关电路设计原理相同,因此方法相同,可以参照前文方法来设计程序。
以使用继电器为核心的起保停电路为例:
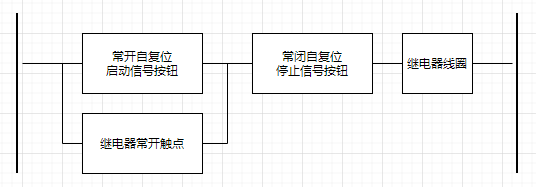
扩展到一般对象,其逻辑代数表示为:
F
k
=
(
X
开
+
K
)
⋅
X
‾
关
F_k=(X_开+K)·\overline{X}_关
Fk=(X开+K)⋅X关
X
开
X_开
X开——控制对象开启信号
X
关
X_关
X关——控制对象关断信号
K
K
K——输出对象的常开触点
在实际应用中,
X
开
X_开
X开和
X
关
X_关
X关会带有约束条件,防止启停信号误动作的影响,保障系统可靠性:
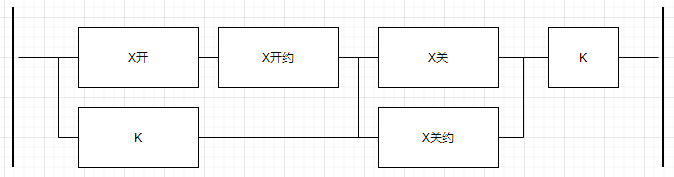
其逻辑函数为:
F
k
=
(
X
开
⋅
X
开约
+
K
)
⋅
(
X
‾
关
+
X
‾
关约
F_k=(X_开·X_{开约}+K)·(\overline{X}_关+\overline{X}_{关约}
Fk=(X开⋅X开约+K)⋅(X关+X关约)
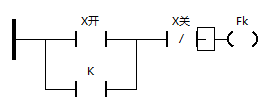
2.2逻辑代数->梯形图
对于PLC梯形图编程,在没有约束条件下,典型输出控制对象的基本逻辑函数可表示为:
F
k
=
(
X
开
+
K
)
⋅
X
‾
关
F_k=(X_开+K)·\overline{X}_关
Fk=(X开+K)⋅X关
X
开
X_开
X开——启动条件
X
‾
关
\overline{X}_关
X关——关断条件
K
K
K——控制对象的当前状态
F
K
F_K
FK——控制对象的下一个状态值
其对应程序如下:
约束条件下,典型输出控制对象的基本逻辑函数可表示为:
F
k
=
(
X
开
⋅
X
开约
+
K
)
⋅
(
X
‾
关
+
X
‾
关约
)
F_k=(X_开·X_{开约}+K)·(\overline{X}_关+\overline{X}_{关约})
Fk=(X开⋅X开约+K)⋅(X关+X关约)
其对应的PLC程序如下:
逻辑设计法的基本使用方法即为:把各种已知信号带入上式中,写出控制对象的逻辑函数,再根据逻辑函数,结合一般设计原则,编写PLC程序。
3实例一则
现在尝试用逻辑设计法解一道题,这是我从网络上搜索到的,不过我学习PLC时也按经验法写过类似的题目。题目和原链接相比有改动,倒不是原题做不来,是我写完了以后发现题目和我写的有差别( ̄▽ ̄)"。
某企业承担了小车往返控制系统的设计任务。要求小车在A、B、C三点之间来回移动(A、B、C三点在一条路线上),一个周期的工作过程为:原位在A点,按下启动按钮后,小车从A点前进至B点,碰到行程开关SQ1后返回至A点,碰到行程开关SQ2后又前进,经过B点不停直接运行到C点,碰到行程开关SQ3返回至A点,完成一个周期后循环。按下停止按钮时,小车即刻停止。
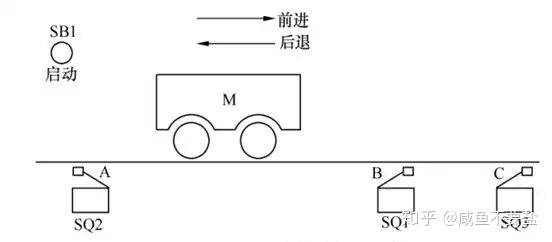
因为牵扯到动作时序,用步进梯形图会容易很多,否则逻辑会比较复杂,但为了体现逻辑代数的优越性,现在我们反其道而行之,并使用逻辑设计法解这道题。
基本逻辑函数见下:
Y
前进
=
(
X
开
+
Y
前进
+
X
A
⋅
Y
后退下降沿
)
⋅
(
X
B
‾
⋅
X
B
约
‾
+
X
C
‾
⋅
X
C
约
)
⋅
X
关
‾
Y_{前进}=(X_开+Y_{前进}+X_A·Y_{后退下降沿})·(\overline {X_B}·\overline {X_{B约}}+\overline {X_C}·X_{C约})·\overline {X_关}
Y前进=(X开+Y前进+XA⋅Y后退下降沿)⋅(XB⋅XB约+XC⋅XC约)⋅X关
Y
后退
=
(
Y
前进下降沿
⋅
(
X
B
+
X
C
)
+
Y
后退
)
⋅
X
A
‾
⋅
X
关
‾
Y_{后退}=(Y_{前进下降沿}·(X_B+X_C)+Y_{后退})·\overline {X_A}·\overline {X_关}
Y后退=(Y前进下降沿⋅(XB+XC)+Y后退)⋅XA⋅X关
上述逻辑函数的格式为
启动条件
⋅
完成条件
⋅
停止条件
启动条件·完成条件·停止条件
启动条件⋅完成条件⋅停止条件
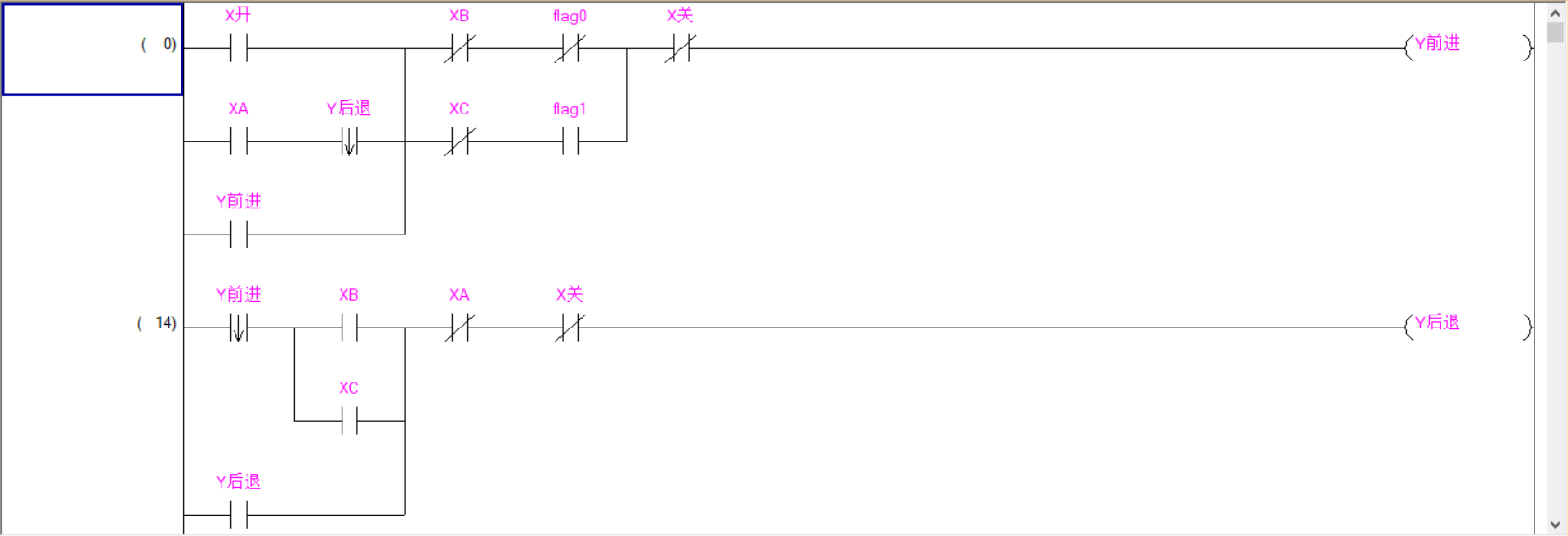
为了防止同时输出前进和后退信号,加入了XB约束条件
X
B
约
X_{B约}
XB约和XC约束条件
X
C
约
X_{C约}
XC约,
X
B
约
X_{B约}
XB约为真的条件是本循环已抵达B点;
X
C
约
X_{C约}
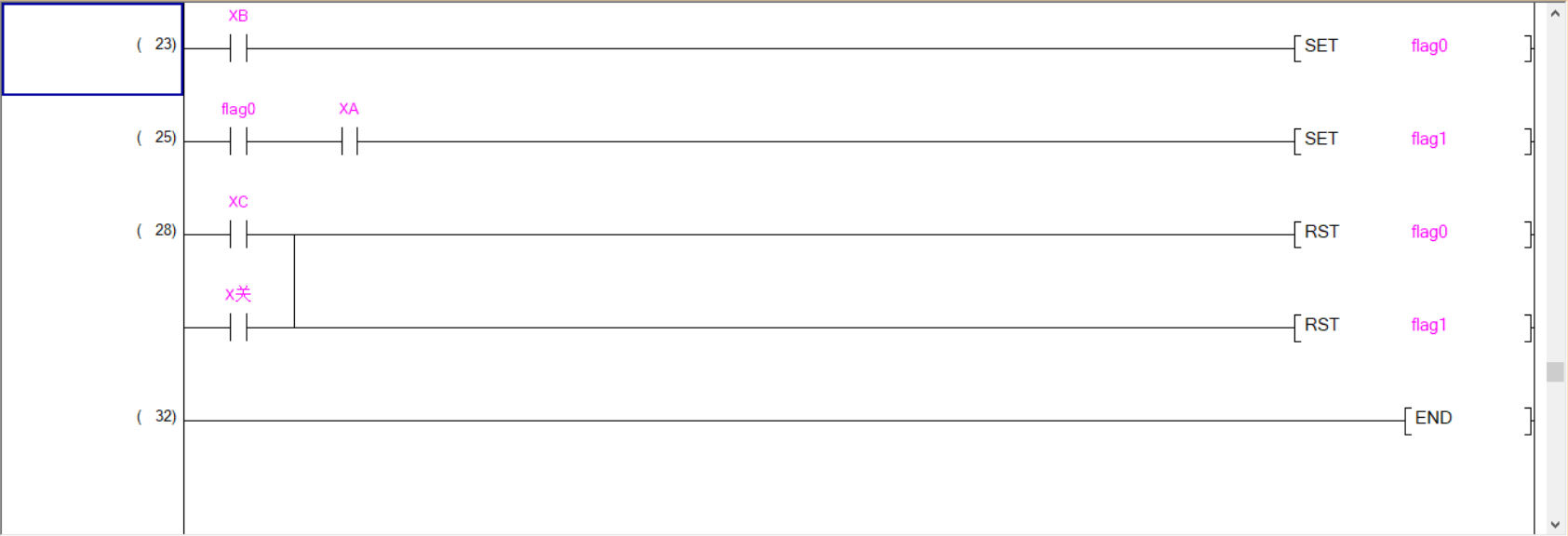
XC约为真的条件是本循环已抵达A点和B点;循环结束后会对约束条件进行复位。
将逻辑函数改写为梯形图,见下:
4利用逻辑表达式实现梯形图程序对数字电路的模拟
4.1对1位数值比较器的模拟
实际上我们可以根据逻辑表达式来编写梯形图程序,模拟一类数字电路。
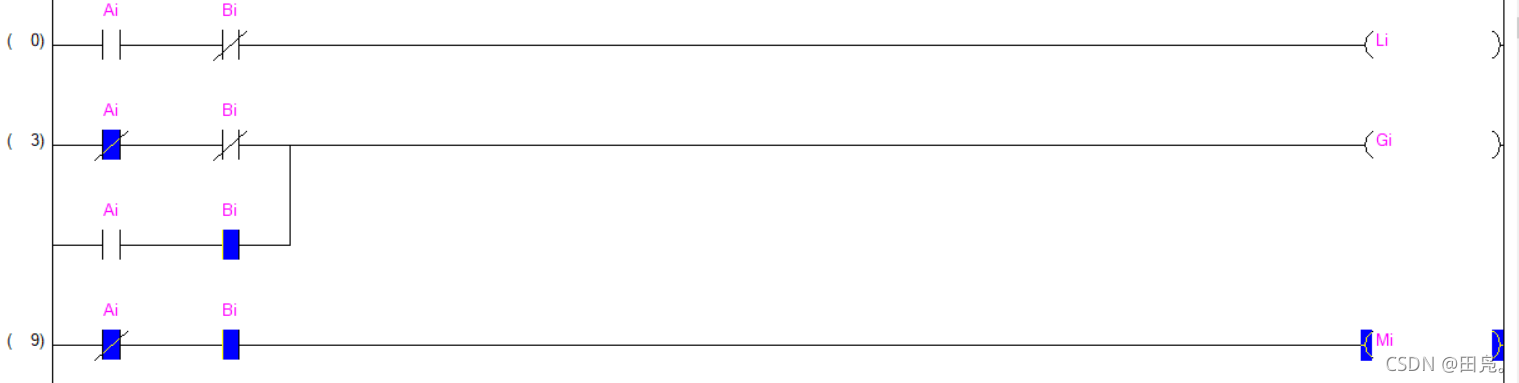
例如以1位数值比较器为例,其逻辑表达式为:
L
i
=
A
i
B
‾
i
L_i=A_i\overline B_i
Li=AiBi
G
i
=
A
‾
i
B
‾
i
+
A
i
B
i
G_i=\overline A_i\overline B_i+A_iB_i
Gi=AiBi+AiBi
M
i
=
A
‾
i
B
i
M_i=\overline A_i B_i
Mi=AiBi
根据上述逻辑表达式可编写如下梯形图程序:
其真值表如下:
| A i A_i Ai | B i B_i Bi | L i L_i Li | G i G_i Gi | M i M_i Mi |
|---|---|---|---|---|
| 0 | 0 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 | 1 |
| 1 | 0 | 1 | 0 | 0 |
| 1 | 1 | 0 | 1 | 0 |
同1位数值比较器的真值表一致。
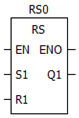
4.2从数字电路演化到功能块
实际上梯形图中的一些功能块即是数字电路的程序化体现,例如RS触发器(复位/置位触发器):
在数字电路中,触发器是用于接收、保存和输出二进制数字信号和两状态逻辑信号的单元单路,其重要概念有现态和次态。
- 现态:触发器接收输入信号之前的状态,用 Q n Q^n Qn表示。
- 次态:触发器接收输入信号之后的状态,用 Q n + 1 Q^{n+1} Qn+1表示。次态既取决于输入信号,也取决于现态(保持特性)。
用或非门组成的基本RS触发器逻辑符号和逻辑电路图见下:

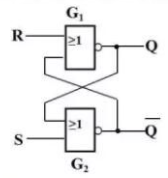
R
R
R、
S
S
S是信号输入端,表示低电平有效
Q
Q
Q、
Q
‾
\overline{Q}
Q是两个互补的信号输出端,表示触发器状态
当电路无输入信号(
R
R
R=
S
S
S=1)时,有两个状态:
0状态:
Q
Q
Q=0、
Q
‾
\overline{Q}
Q=1
1状态:
Q
Q
Q=1、
Q
‾
\overline{Q}
Q=0
当
R
R
R=1、
S
S
S=0时,触发器将变成1状态,因此习惯上把
S
S
S端称为置位端;
当
R
R
R=0、
S
S
S=1时,触发器将变成0状态,因此习惯上把
R
R
R端称为复位端;
不允许
R
R
R=
S
S
S=1,此即为约束条件。
特性方程用于描述基本RS触发器次态输出
Q
n
+
1
Q^{n+1}
Qn+1与现态
Q
n
Q^{n}
Qn和输入
R
R
R、
S
S
S之间的函数关系。
RS基本触发器的特性方程为:
{
Q
n
+
1
=
S
+
R
‾
⋅
Q
n
R
S
=
0
约束条件
\begin{cases} Q^{n+1}=S+\overline{R}·Q^{n}\\ RS=0~~~~~~~约束条件 \end{cases}
{Qn+1=S+R⋅QnRS=0 约束条件

















 536
536

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









