






结合自己的深度camera输出rgbd图,利用open3d的example(ReconstructionSystem)算法进行三维重建
1、获取rgbd数据
调用自己的rgbd camera API获取rgb图、depth图以及ir图
```cpp
在这里插入代码片// TestApp.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <stdio.h>
#include <fstream>
#include "OfOmsOperation.h"
#include<string>
#include <opencv2/opencv.hpp>
#include <opencv2/imgcodecs.hpp>
using std::string;
using namespace cv;
int main()
{
char* pErroMsg = new char[128];
int ret = Initialize(pErroMsg);
if (ret != 0)
{
printf(pErroMsg);
return ret;
}
IMGINFO imgInfo;
/*循环抓图*************************************************************************
for (int i = 0; i < 10; i++) {
ret = CaptureBuffer(imgInfo, pErroMsg);
std::string bb = "";
bb = std::to_string(static_cast<long long>(i));
if (ret != 0)
{
printf(pErroMsg);
return ret;
}
std::fstream depth_file("depth/depth" + bb + ".raw", std::fstream::out | std::ios::binary | std::ios::trunc);
depth_file.write((char*)imgInfo.depth_buffer, imgInfo.depth_size);
depth_file.close();
std::fstream ir_file("ir/ir" + bb + ".raw", std::fstream::out | std::ios::binary | std::ios::trunc);
ir_file.write((char*)imgInfo.ir_buffer, imgInfo.ir_size);
ir_file.close();
std::fstream rgb_file("rgb/rgb" + bb + ".jpg", std::fstream::out | std::ios::binary | std::ios::trunc);
rgb_file.write((char*)imgInfo.rgb_buffer, imgInfo.rgb_size);
rgb_file.close();
cv::Mat img = cv::imread("rgb/rgb" + bb + ".jpg", cv::IMREAD_UNCHANGED);
cv::imwrite("rgb1/out"+bb+".png", img);
}
*/
for (int i = 0; i < 10; i++) {
ret = CaptureBuffer(imgInfo, pErroMsg);
if (ret != 0)
{
printf(pErroMsg);
return ret;
}
}
std::fstream depth_file("./depth2.raw", std::fstream::out | std::ios::binary | std::ios::trunc);
depth_file.write((char*)imgInfo.depth_buffer, imgInfo.depth_size);
depth_file.close();
//处理depth图像使其raw图转为可视得png图*************************************
FILE* fp;
fp = fopen("depth2.raw", "rb");//打开文件
//创建一个大小与文件大小、类型相同的Mat src,h为src.rows,w为src.cols
Mat src;
int h = 216; int w = 162;
src.create(Size(h, w), CV_16UC1);
fread(src.data, sizeof(unsigned short), h * w, fp);//将文件读入src
//normalize(src, src, 0, 255, NORM_MINMAX);//将src中0~65535缩放到0~255
//src.convertTo(src, CV_8UC1);//将src改为8位,用来显示
//imshow("原图", src);
imwrite("depth2.png", src);
waitKey(0);
//return 0;
//std::cout << mat2.type() << std::endl;
//cv::imwrite("depth.png", mat);
/*
std::fstream ir_file("./ir2.raw", std::fstream::out | std::ios::binary | std::ios::trunc);
ir_file.write((char*)imgInfo.ir_buffer, imgInfo.ir_size);
ir_file.close();
*/
std::fstream rgb_file("./rgb2.jpg", std::fstream::out | std::ios::binary | std::ios::trunc);
rgb_file.write((char*)imgInfo.rgb_buffer, imgInfo.rgb_size);
rgb_file.close();
cv::Mat img = cv::imread("./rgb2.jpg", cv::IMREAD_UNCHANGED);
cv::imwrite("out.png", img);
if ( imgInfo.ai_size > 0) {
std::fstream ai_file("./ai.bin", std::fstream::out | std::ios::binary | std::ios::trunc);
ai_file.write((char*)imgInfo.ai_buffer, imgInfo.ai_size);
ai_file.close();
}
Dispose();
printf("finished\n");
int c = getchar();
return 0;
}
这里应该着重注意depth得图像格式:可参考https://blog.csdn.net/weixin_52238310/article/details/121284234
将输出图像rgb与d得分辨率对其,这里均设置为640*480
from PIL import Image
def transfer(infile, outfile):
im = Image.open(infile)
reim=im.resize((640, 480))#宽*高
reim.save(outfile,dpi=(96.0,96.0)) ##200.0,200.0分别为想要设定的dpi值
if __name__ == '__main__':
infil=r"rgb2.jpg"
outfile=r"00000.jpg"
transfer(infil, outfile)
2、重建
开源代码请下载GitHub(https://github.com/intel-isl/Open3D),然后进到C:\python_rebuild\Open3D-master\Open3D-master\examples\python\reconstruction_system

这里建议建立哟个conda新环境,下载相关的依赖:
建议下载open3d0.16.0之后,它支持python接口得.pipeline后面重建会用到。
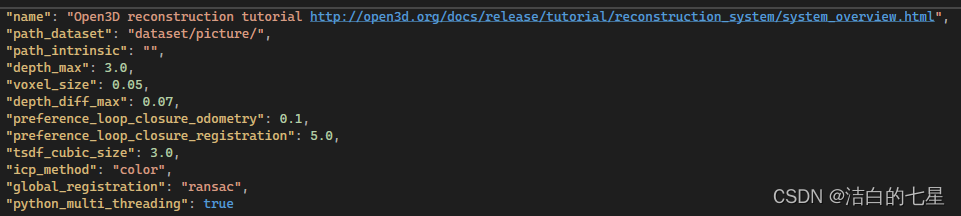
将自己的RGB数据放在image文件夹中,Depth数据放在depth文件夹中,然后把它们放到同一个文件夹下命名picture(自己随意命名),后移动到ReconstructionSystem文件夹的dataset(没有的话自己新建)里。然后在config文件夹下找到tutorial.json文件,修改里面的database数据为dataset/(你的数据名称,与上面创建的文件夹对应),并把它复制到dataset文件夹下后改名为config.json。
最后就按照源码得readme操作重建:
python run_system.py --config dataset\config.json --make
python run_system.py --config dataset\config.json --register
python run_system.py --config dataset\config.json --refine
python run_system.py --config dataset\config.json --integrate
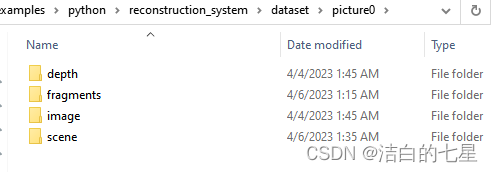
执行以上之后会生成如下几个文件夹:
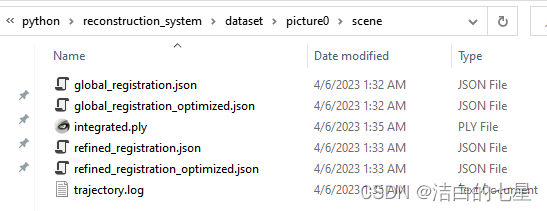
然后重建拼接后的模型在scene中:
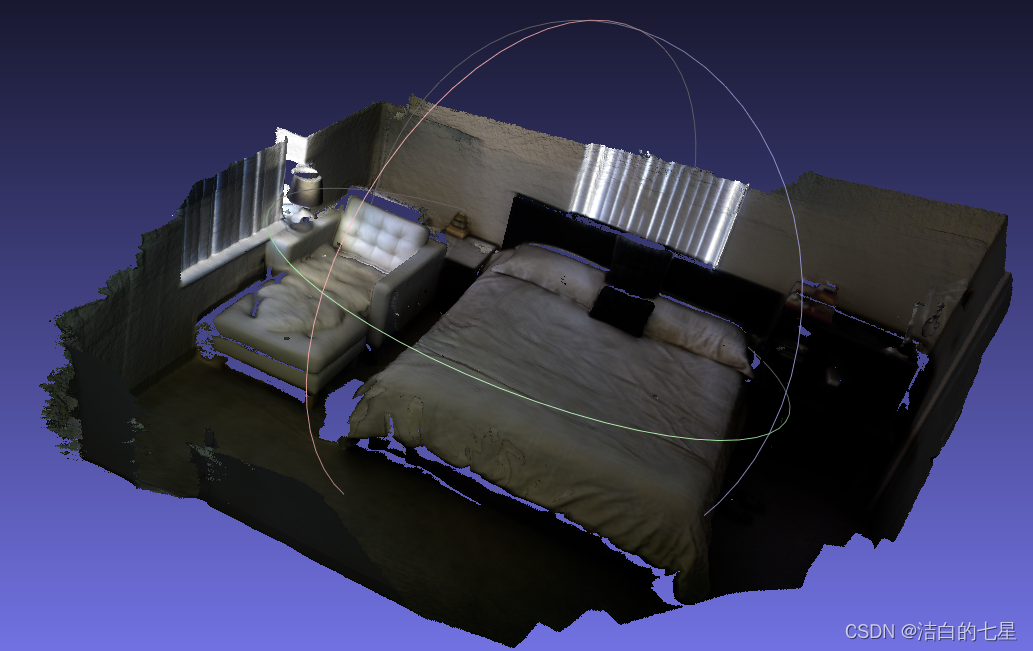
生成模型用meshlab打开如下:
注意:在过程中可能会遇到很多环境依赖问题,根据报错信息会锁定并解决















 3210
3210











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









